1
Известны устройства для управления храповым механизмом, содержащие связанные шарнирнорычажной системой поворотные упоры, взаимодействующие с храповыми рейками.
Однако в известных устройствах команда на включение поворотных упоров поступает только в момент движения подвижной платформы вверх, так как при движении платформы вниз возникают больщие динамические нагрузки, а при посадке платформы не на все упоры возможна авария, которая может вывести все устройство из строя. Кроме того, от оператора требуется высокая квалификация и большое напряжение в работе, особенно при волнении моря. Эти недостатки известных устройств делают управление поворотными упорами из кабины оператора практически невозможными и небезопасными.
Цель изобретения--повышение надежности и автоматизация стонорения платформы в районе мертвой точки ее колебаний.
Эта цель достигается тем, что по бокам храновых реек установлены копиры, взаимодействующие с подпружиненными регулируемыми щупами, смонтированными на упорах, причем один копир выполнен с насечкой, встречно направленной зубьям храповой рейки, а другой - с зубьямн, по направлению и
количеству совпадающими с зубьями храповой рейки.
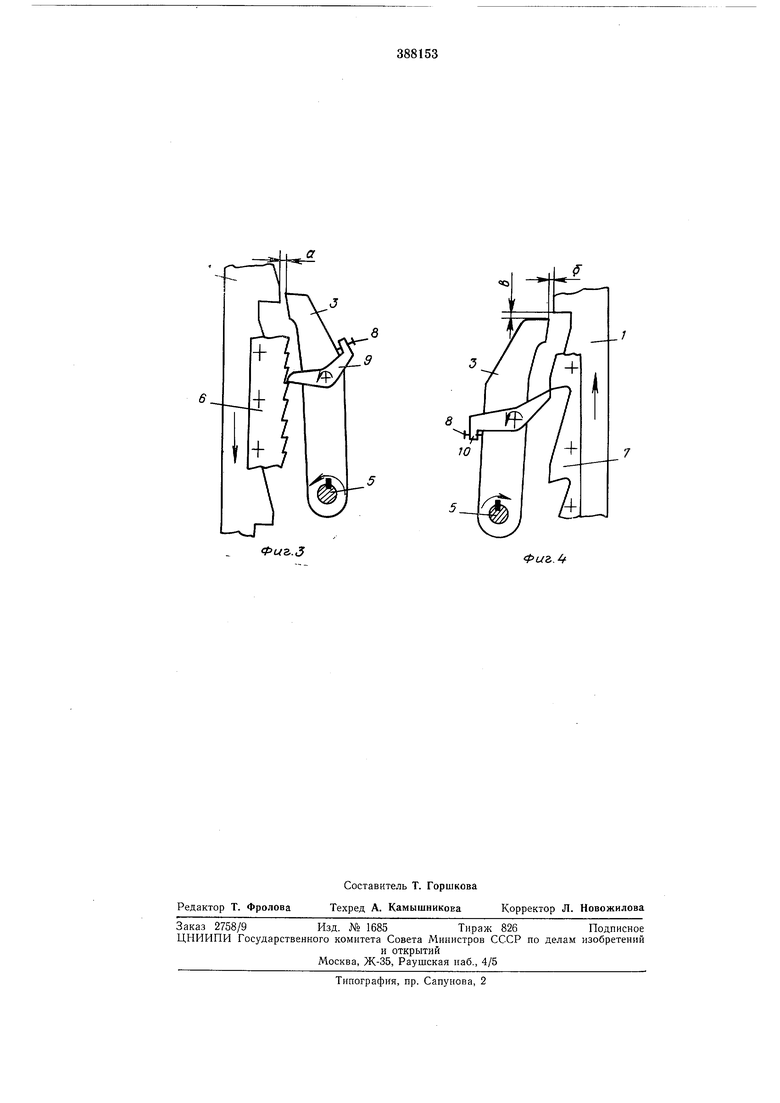
На фиг. 1 изображено описываемое устройство в аксонометрии; на фиг. 2 - устройство, вид сверху; на фиг. 3 - то же, вид слева (левый копир); на фиг. 4 - то же, вид справа (правый копир).
Описываемое устройство содержит храповые рейки /, закрепленные на подвижной платформе 2 и взаимодействующие с поворотными упорами 3, связанными шарнирно-рычажной системой 4 и сидящими на валах 5. По бокам храповых реек установлены копиры 6 и 7, взаимодействующие с подпружиненными регулируемыми с помощью винтов 8 щупами 9 и 10, смонтированными па упорах 3. Работает устройство следующим образом. Подвижная платформа с храповыми рейками / движется вниз (см. фиг. 3). При повороте вала 5 против часовой стрелки упор 3 щупом 9 упирается в копир б и не входит в зацепление с храповой рейкой 1, причем с помощью регулировочного винта 8 при движении платформы на всем ее пути обеспечивается зазор а, равный 0,2-0,3 шага зубьев рейки, необходимый для свободного движения платформы. Так как зазор а в этом случае в два раза больше зазора б (см. фиг. 4), то щуп 10 не находится в зацеплении с копиром 7, т. е. находится в нерабочем положении.
Подвижная платформа с храповыми рейками / движется вверх (см. фиг. 4). Щуп 9 подхватывается насечками копира 6 и поворачивается по часовой стрелке, т. е. выводится из рабочего состояния, что ведет к уменьшению зазора а и дает возможность упору 3 войти в зацепление с рейкой /, а щупу 10 войти в зацепление с копиром 7. Дальнейшее включение упоров происходит в зависимости от положения щупа 10. Щуп скользит по зубьям копира 7 и в момент срыва с кромками зуба копира обеспечивается одновременное срабатывание упоров , т. е. выдерживаются зазоры в и б, которые равны 0,10+0,15 щага зубьев рейки и необходимы для компенсации всех неточностей изготовления упоров и реек и их монтажа.
Таким образом, автоматизация стопорения производится при помощи двух копирных механизмов, которые обеспечивают гарантированный ввод в зацепление с рейками всех упоров только при ходе платформы вверх.
Предмет изобретения
Устройство для управления храповым механизмом, содержащее связанные щарнирнорычажной системой поворотные упоры, взаимодействующие с храповыми рейками, отличающееся тем, что, с целью повышения надежности и автоматизации стопорения платформы в районе мертвой точки ее колебаний, по бокам храловых реек установлены копиры, взаимодействующие с подпружиненными
регулируемыми щупами, смонтированными на упорах, причем один копир выполнен с насечкой, встречно направленной зубьям храповой рейки, а другой - с зубьями, по направлению и количеству совпадающими с зубьями
храповой рейки.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ГРУЗОВ С ОДНОГО СУДНА НА ДРУГОЕ В УСЛОВИЯХ ОТКРЫТОГО МОРЯ | 1971 |
|
SU303234A1 |
| Устройство для вырубки изделий из резины | 1976 |
|
SU649596A1 |
| Устройство для поворота и стопорения регулировочного кольца конусной дробилки | 1982 |
|
SU1036364A1 |
| МЕХАНИЗМ ДЛЯ МНОГОПРОХОДНОЙ ОБРАБОТКИ | 1973 |
|
SU383566A1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЯ ВО ВРАЩАТЕЛЬНОЕ ДВУМЯ ПОДВИЖНЫМИ ЗУБЧАТЫМИ РЕЙКАМИ НА ШАТУНЕ В ДВИГАТЕЛЕ ВНУТРЕННЕГО СГОРАНИЯ | 2011 |
|
RU2479734C2 |
| Устройство кривовязюков для вырубкизАгОТОВОК из пОлОСОВОгО илЕНТОчНОгО МАТЕРиАлА | 1979 |
|
SU804501A1 |
| РЕЗЬБОТОКАРНЫЙ ПОЛУАВТОМАТ С НЕРЕВЕРСИВНЫМ ШПИНДЕЛЕМ | 1969 |
|
SU241904A1 |
| Устройство для термической резки | 1982 |
|
SU1147530A1 |
| ЗАПОР ДЛЯ ДВЕРЕЙ ТРАНСПОРТНОГО ВАГОНА | 1991 |
|
RU2061165C1 |
| Пресс для вырубки изделий излиСТОВОгО и лЕНТОчНОгО МАТЕРиАлА | 1978 |
|
SU795648A1 |
Фаг. 2
«о
vry
