На большинстве старых рудников еще до настоящего времени при укладке угля и руды в штабеля под эстакадами применяются ручные методы работы по откатке и разгрузке рудничных вагонеток, что связано с значительной затратой рабсилы и потерей времени. В виду этого механизация этого труда даст значительно экономические выгоды, повысив производительность труда при меньшей потребности рабсилы, что и имеет целью данное предложение устройства вращающегося опрокидывателя для вагонеток, процесс работы которого заключается в том, что нормальная катучая вагонетка получает поступательно-возвратное движение по эстакаде при посредстве двухконцевой электрической реверсивного хода лебедки и устанавливается на передвижной тележке, на раме которой смонтирован вращающийся кольцевой опрокидыватель, состоящий из рамы, покоящейся на роликах, жестко связанных с ходовыми колесами тележки, и автоматически на любом желаемом участке пути могущий быть приводимым в действие посредством системы рычагов и груза, действующих на стопор, задерживающий вращение рамы опрокидывателя. Вагонетка, поворачиваясь вместе с опрокидывателем, разгружается. Управление опрокидывателем производится из надшахтного здания с помощью переключательной рукоятки.
Смена вагонеток происходит автоматически благодаря уклону рельсовых путей и блокировке автоматически действующих запорных устройств.
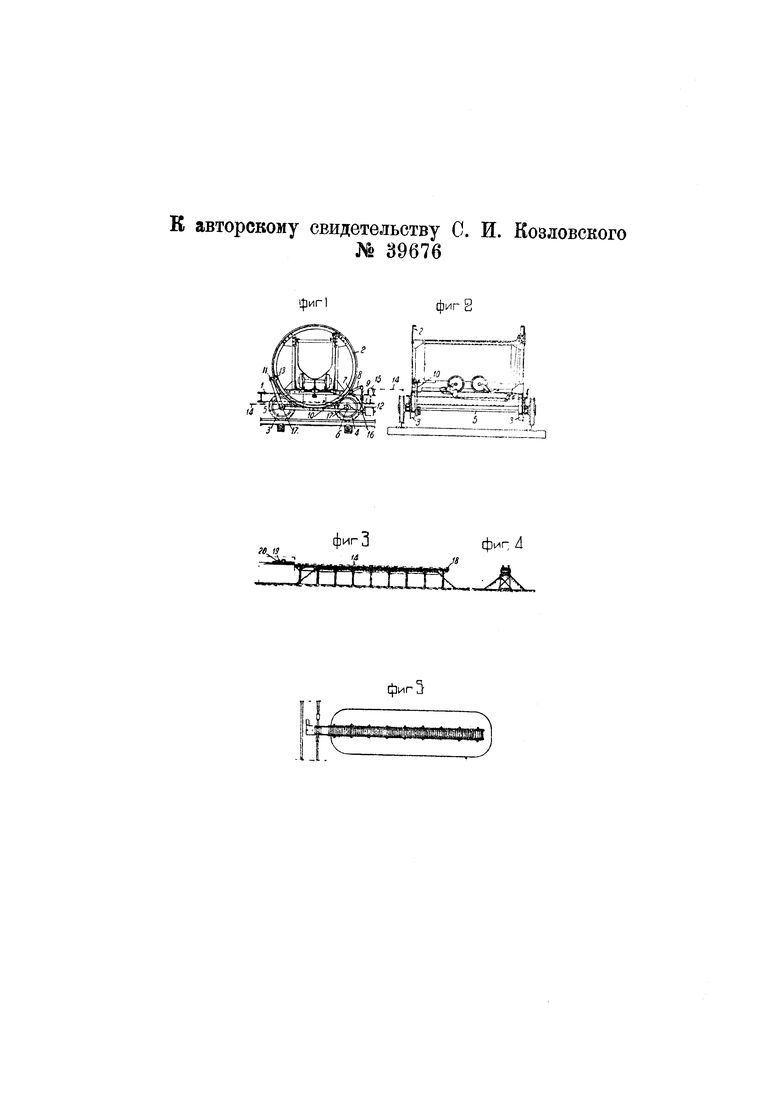
На чертеже фиг. 1 изображает опрокидыватель в продольном виде; фиг. 2 - поперечный вид; фиг. 3, 4, 5 - оборудование в продольном виде, в поперечном и в плане.
Конструкция катучего опрокидывателя (фиг. 1) состоит из собственно основной рамы - катучей тележки 1 и монтированной на ней кольцевой рамы 2.
Кольцевая рама 2 установлена на основной раме катучей тележки 1 на двух парах роликов 3 и 4, из которых одна пара 3 - поддерживающая сидит свободно на оси 5. Другая пара роликов 4 - приводная заклинена на оси 6. Нормально кольцевая рама опирается на поддерживающие ролики 3 и кулачок 7. Во время движения опрокидывателя приводные ролики 4 вращаются вхолостую. Вал с кулачком 7 при посредстве рычага 8 и тяги 9 связан с двуплечим рычагом 10. Последний на конце одного плеча несет стопор 11, а на другом плече имеет контр-груз 12. Под действием контр-груза 12 стопор 11 нормально вклинивается в особое гнездо 13 на ободе рамы 2, строго фиксируя точное положение последней.
Рама 2 получает вращательное движение во время движения опрокидывателя от упомянутых выше приводных роликов 4 следующим образом.
Включение в действие кольцевой рамы для разгрузки вагонеток, как уже упоминалось, осуществляется при возвратном ходе катучего опрокидывателя поворотом двуплечего рычага 10 вверх и, следовательно приподнятием контр-груза. Связанный с последним стопор 11 освобождает обод рамы 2, а вал с кулачком 7, одновременно поворачиваясь, передает давление обода рамы 2 на приводные ролики 4, вследствие чего рама получает вращательное движение. Ролик стопора 11, прижимаясь под действием контр-груза 12 к ободу круговой рамы, катится по ней и, следовательно, не препятствует вращению рамы.
Как только обод цилиндрической рамы возвращается в исходное положение, стопор 11 снова заклинивается в гнездо 13, а вал с кулачком 7, одновременно поворачиваясь, приподымает раму 2 с приводных роликов 4.
Таким образом, остановка вращения рамы 2 и точная фиксация ее нормального положения происходят совершенно автоматически.
Управление разгрузкой катучего опрокидывателя производится во время движения из надшахтного здания при помощи стального троса 14, перекинутого через направляющие ролик 15, 16 и 17 в опрокидывателе. Один конец стального троса 14 (фиг. 3), укреплен в конце эстакады при посредстве противовесного устройства 18 с целью создания достаточного первоначального натяжения, другой конец - на рукоятке управления 19. Поворотом последней соответственно укорачивается длина стального троса, происходит поворот двуплечего рычага 10 вверх, поднятие контр-груза 12, вывод стопора 11 из гнезда 13, освобождение вала с кулачком 7 и приключение рамы 2 к приводным роликам 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| Передвижной опрокидыватель | 1973 |
|
SU564426A1 |
| Транспортный комплекс для проведения уклонов | 1989 |
|
SU1752875A1 |
| ПРИЕМНАЯ ПЛОЩАДКА НАДШАХТНОГО ЗДАНИЯ С ОБМЕНОМ ВАГОНЕТОК | 2007 |
|
RU2338882C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ АВТОМАТИЧЕСКОГО ВРАЩЕНИЯ ПЕРЕДВИЖНЫХ, ПОВОРОТНЫХ ВОКРУГ ГОРИЗОНТАЛЬНОЙ ОСИ, ТОРЦЕВЫХ ВАГОНЕТОЧНЫХ ОПРОКИДЫВАТЕЛЕЙ | 1929 |
|
SU20543A1 |
| Перестановочная платформа | 1960 |
|
SU133914A1 |
| Вагонетка воздушно-трелевочной установки | 1961 |
|
SU145612A1 |
| Гидравлический толкатель вагонеток | 1977 |
|
SU1033775A1 |
| Комплекс механизмов для поверхностной откатки | 1959 |
|
SU127224A1 |
| ПРИЕМНАЯ ПЛОЩАДКА НАДШАХТНОГО ЗДАНИЯ С ОБМЕНОМ ВАГОНЕТОК | 2007 |
|
RU2352515C1 |
| ПРИЕМНАЯ ПЛОЩАДКА НАДШАХТНОГО ЗДАНИЯ С ОБМЕНОМ ВАГОНЕТОК | 2007 |
|
RU2336418C1 |
1. Вращающийся опрокидыватель для вагонеток, получающий автоматически вращение при передвижении несущей его тележки по рельсам, отличающийся тем, что, с целью включения опрокидывателя в действие на любом желаемом участке пути, кольцевая рама 2 опрокидывателя выполнена опускной на ролики 4, жестко связанные с ходовыми колесами тележки, несущей опрокидыватель.
2. Форма выполнения опрокидывателя по п. 1, отличающаяся тем, что служащий для опускания и поднимания рамы 2 кулачок 7 шарнирно сочленен со стопором 11 для опрокидывателя с целью одновременного управления кулачком 7 и стопором 11 путем натягивания троса 14, огибающего ролик 16, связанный с кулачком 7.
