1
Изобретение относится ж грузоподъемным механизмам, а И1меино .к захватньим устройства-м для грузов с .внутренней полостью.
По основному авт. св. № 359223 известно захватное устройство для грузов с внутренней полостью, содержащее полый корпус с клиHOiM внизу .и ско|бой вверху и тросовые подвески, несущие подпружиненные клиновидные кулаЧки.
Устройство снабжено поворотным рычагом, устаиовленным на укрепленной в скобе оси и соединенным с тросовыми под1веска1МИ и гибкой тягой дистанционной отстропки.
Однако в ,из1вестны,х устройствах для дистаиционного отцепления от груза необходим KjpaH, снабженный двумя (основным и вспомогательным) крюками.
Цель и:зоб|ретания - дистанционная отстраяка груза с использованием одного грузоподъемного механизма.
Эта цель достигается тем, что на скобе жестко укреплен эксцентрик с лазом, .а поворотный рычаг снабжен .подпружиненной собачкой со щтырем, п.р1ичем устройство подвешено к «рюку (Грузоподъемного механизма через вспомогательный крюк с противовесам.
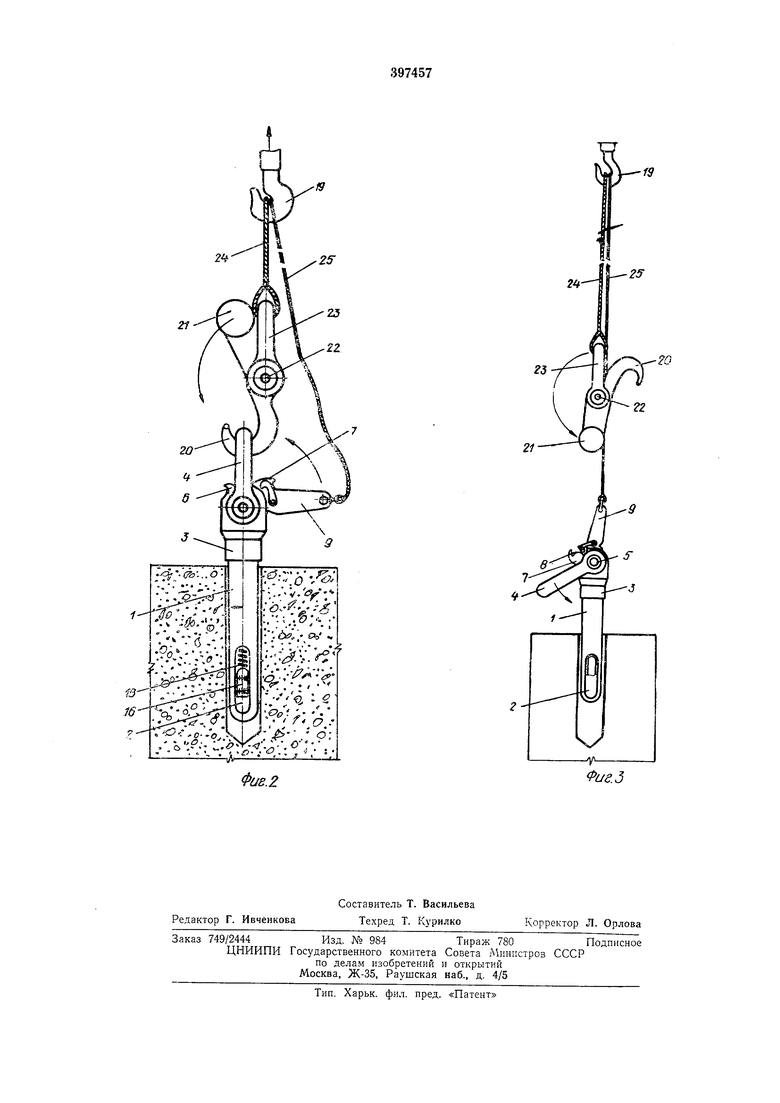
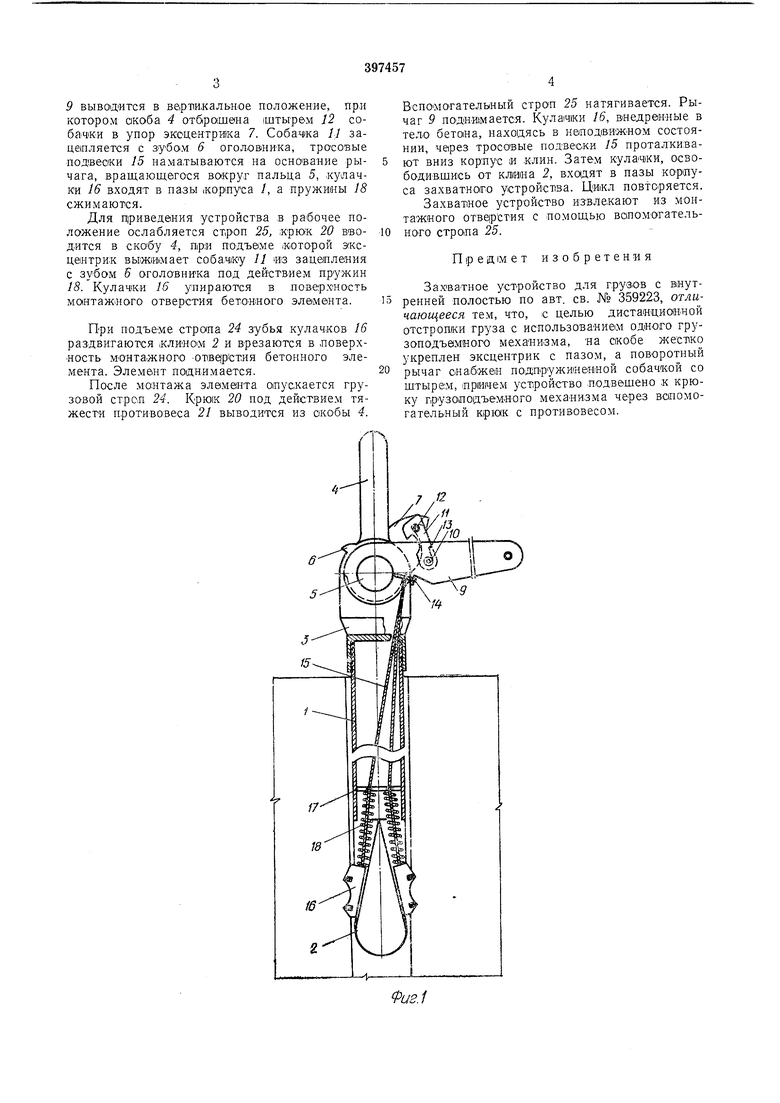
На фиг. 1 изображено предлагае1мое устройство, .разрез; на фиг. 2 - то же, в момент подъе/ма изделия; на фиг. 3 - то же, в момент растроповки захватного устройства.
Устройство содержит полый .корпус / с прикрепленным к нему с одной стороны клином 2, а с другой стороны - оголовником 3. Оголо,нник соединен с такелажной скобой 4 пальцам 5. На пальце укреплен зуб б .
В такелажной скобе 4 жестко прикреплен эксцентрик 7 с пазом 8.
На пальце 5 щарнцрно закреплен поворотный рычаг 9, на KOTopoiM л-сестко ужреплена ось 10, снабженная подпружиненной собачкой 7/ со штырем 12. Па оси 0 установлена пружина 13, поджимающая собачку. К рычагу 9 с пОМощью штифта 14 прикреплены тросовые подвески 15, на концах которых И меются кулачки 16. Между торца.ми кулачков и расположенной внутри корпуса диафрагмой 17 на подвесках 15 надеты пружины 18.
Устройство скобой 4 подвешено к .крюку 19 грузоподъемного механизма через вспомогательный крюк 20 с П1ротивовесо:м 21.
Крюк 20 присоединен пальцем 22 к скобе
23.Последняя навешена на грузовой строп
24.Строп 24 навешивается на крюк 19 крана. Через кран пропущен вспомогательный строп
25.соединенный с концол рычага 9.
Работает устройство следующим образом.
Устройство вводится в отверстие бетонного элемента до упора оголовника с помощью вспомогательного стропа 25. При этом рычаг 9 выводится в вертикальное положение, при котором акоба 4 отброшена штырем 12 собачки в упор эксцентрика 7. Собачка 11 зацепляется с зубом 6 столовника, тросовые подвеаки 15 наматываются на основание рычага, вращающегося вокруг пальца 5, .кулачки 16 входят в пазы жорлуса /, а пружины 18 сжимаются. Для приведения устройства в рабочее положение ослабляется строп 25, :кркж 20 ввод.ится в скобу 4, пря подъеме которой эксцентрик выжимает собачдау 11 тз зацепления с зубом 6 о-головника под действием пружин 18. Кулачки 16 упираются в поверхность монтажного отверстия бетонного элемента. При подъеме стро1па 24 зубья кулачков 16 раздвигаются 1клино1м 2 и врезаются в .поверхность монтажного -отвчр тия бетонного элемента. Элемент поднимается. После монтажа элемента опускается грузовой строп 24. Крюк 20 под действием тяжести противовеса 21 выводится из окобы 4. Вспомотательный строп 25 натягивается. Рычаг 9 поднимается. Кулачки 16, внедренные в тело бетона, находясь в неподвижном состоянии, через тросовые подвески 15 проталкивают вниз корпус и клин. Затем кулачки, освободившись от клена 2, вхадят в пазы корпуса захватного устройства. Цикл пов1оряется. Захватное устройство извлекают из монтажиого отв рстия с номощью вппомогательного страпа 25. Пред1мет изобретения Захватное устройство для грузов с внутренней полостью по авт. св. № 359223, отличающееся тем, что, с целью дистанционной отстропки груза с использованием одного грузоподъемного механизма, на скобе жестко укреплен эксцентрик с пазом, а поворотный рычаг снабжен подпружиненной собачкой со щтырем, примем устройство подвещено к крюку грузоподъемного механизма через вспомогательный крюк с противовесом.
f9
24
21
Фа8.2
Ч/
v
Фиг.З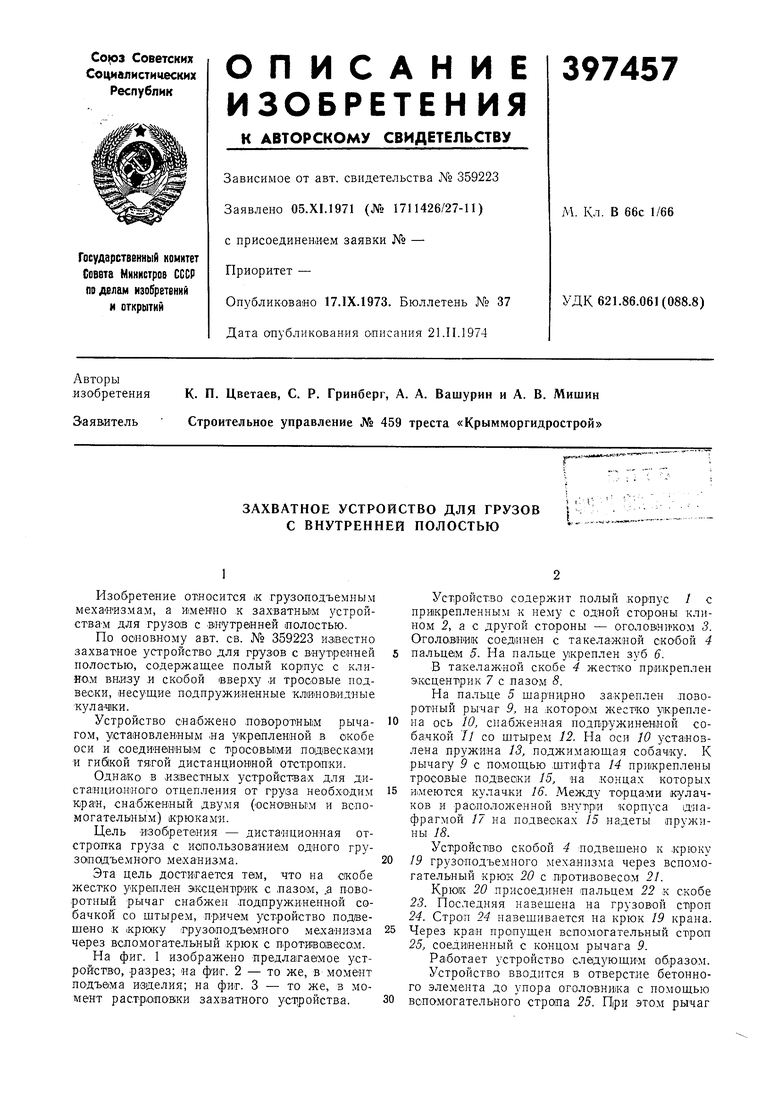
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАНТОВАНИЯ КРУПНОГАБАРИТНЫХ ЦИЛИНДРИЧЕСКИХ ГРУЗОВ | 2020 |
|
RU2742665C1 |
| СПОСОБ ПОДЪЁМА И РАЗГРУЗКИ НЕСУЩЕЙ ТАРЫ | 2013 |
|
RU2554908C2 |
| Автоматизированный дистанционно управляемый подъемный крюк | 2023 |
|
RU2809751C1 |
| Захватное устройство для грузов с проушинами | 1990 |
|
SU1787925A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
RU2009978C1 |
| Грузозахватное устройство | 1988 |
|
SU1652277A1 |
| УСТРОЙСТВО ДЛЯ СБОРКИ ЛОПАСТИ | 2020 |
|
RU2742357C1 |
| Грузозахватное устройство | 1980 |
|
SU931656A1 |
| Саморасцепляющееся грузозахватное устройство | 1981 |
|
SU992386A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1971 |
|
SU421612A1 |