1
Изобретение относится к устройствам, управляющим сложным пространственным перемещением исполнительного органа, например режущего инструмента, и может быть применено для механического изменения конфигурации гибкого элемента копира.
Известен копир к копировальному приспособлению к токарным станкам для обработки сложных пространственных поверхностей, в частности лопаток турбин. Он содержит ряд контурных кулачков, установленных соосно и взаимодействующих с роликами, установленными на толкателях, заключенных в направляющих отверстиях. На верхних концах толкателей закреплены башмаки, снабженные сферическими губка.ми. Между этими губками зажата копирная лента в виде эластичной пластины.
Лри вращении кулачков толкатели двин утся возвратно-поступательно по закону, заданному пространственной поверхностью с образующей, изменяющейся по форме, заставляя эластичную пластину изменять свою конфигурацию в соответствии с переменными очертаниями образующих.
Однако при настройке такого копира на обработку новой поверхности необходимо изготовлять новый программоноситель в виде набора контурных кулачков соответствующего профиля. Кроме того, он неприменим для
многокоординатного пространственного перемещения режущего органа.
Целью изобретения является упрощение программирующего органа, а также обеспечение многокоординатного перемещения исполнительного органа с программным перемещением по каждой из координат.
Это достигается тем, что перфорированный программоноситель укреплен на лентопротяжном механизме, гибкая пластина установлена между парными роликами, смонтированными на механических щупах. Щупы выполнены с возможностью перемещения по направляющим транспортера и снабжены игольчатыми стержнями, входящими в выполненные на программоносителе отверстия при взаимодействии щупов с установочным барабаном.
Установочный барабан закреплен на корпусе и снабжен ремнем с отверстиями, предназначенными для фиксации механиечских щупов при перемещении их относительно перфоленты.
Для многокоординатного перемещения исполнительного органа устройство может быть снабжено дополнительными эластичными пластинами, взаимодействующими с общим программоносителем.
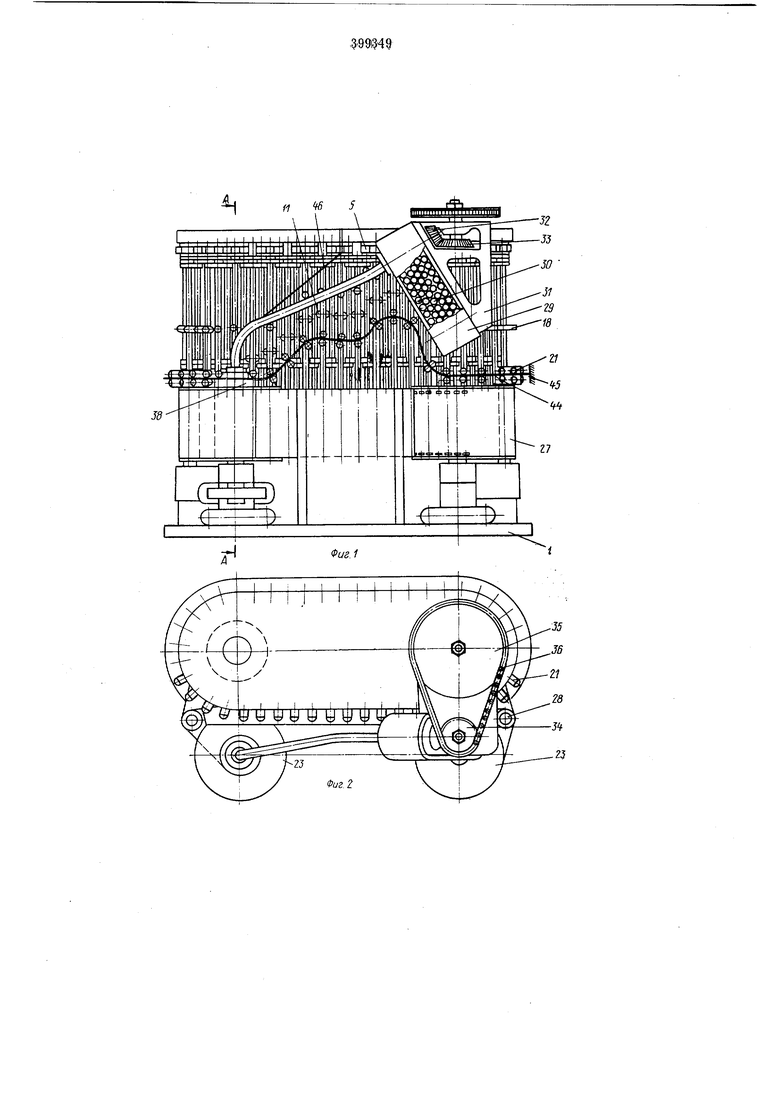
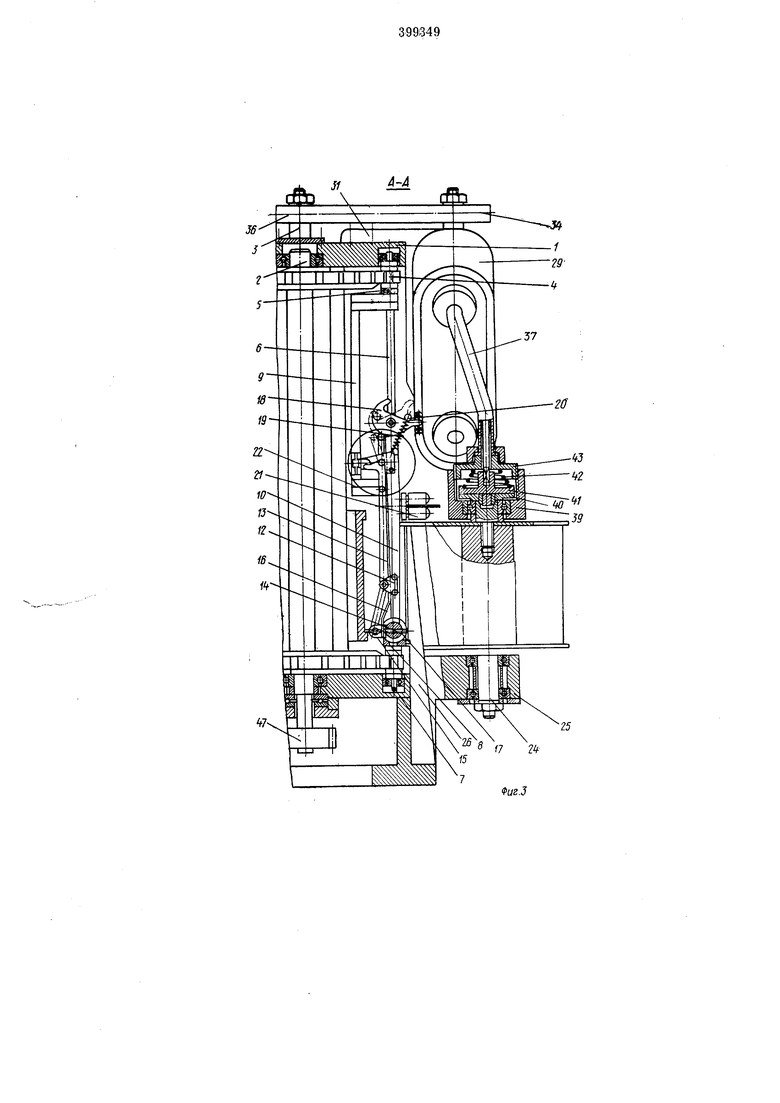
На фиг. 1 показан предлол енный копир, вид спереди; на фиг. 2 - то же, вид сверху; на фиг. 3 -разрез по А - А на фиг. 1; на
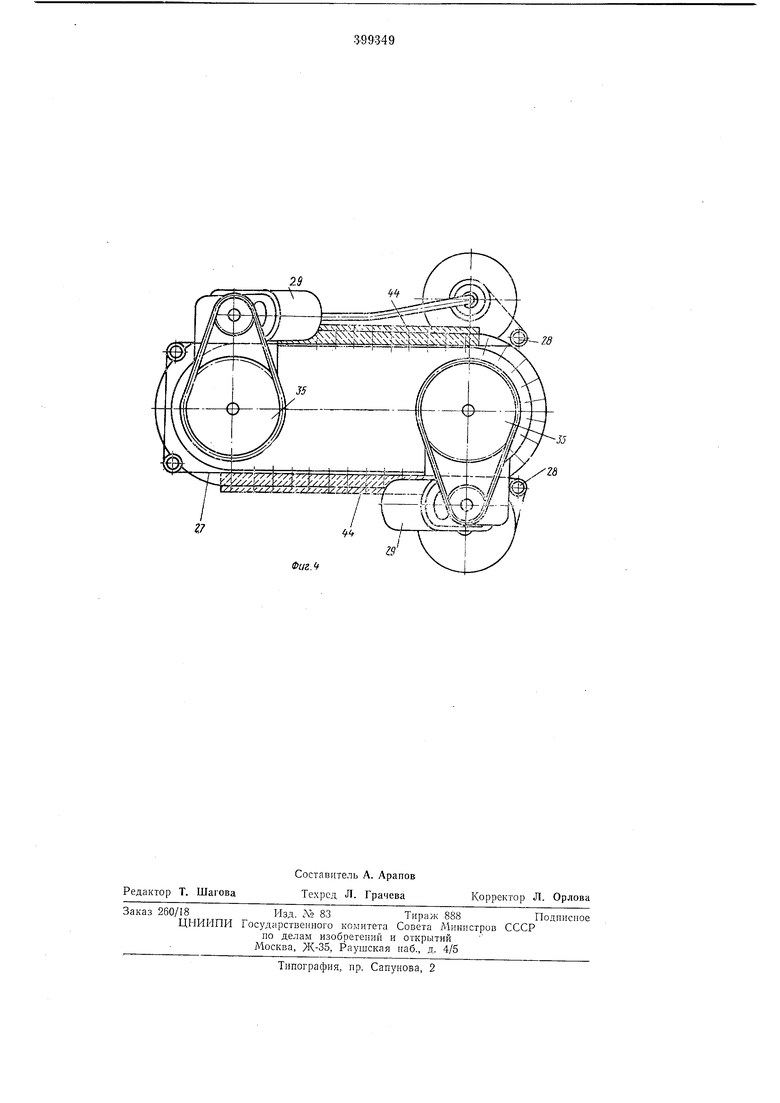
фиг. 4 приведена схема установки дополнительной гибкой пластины.
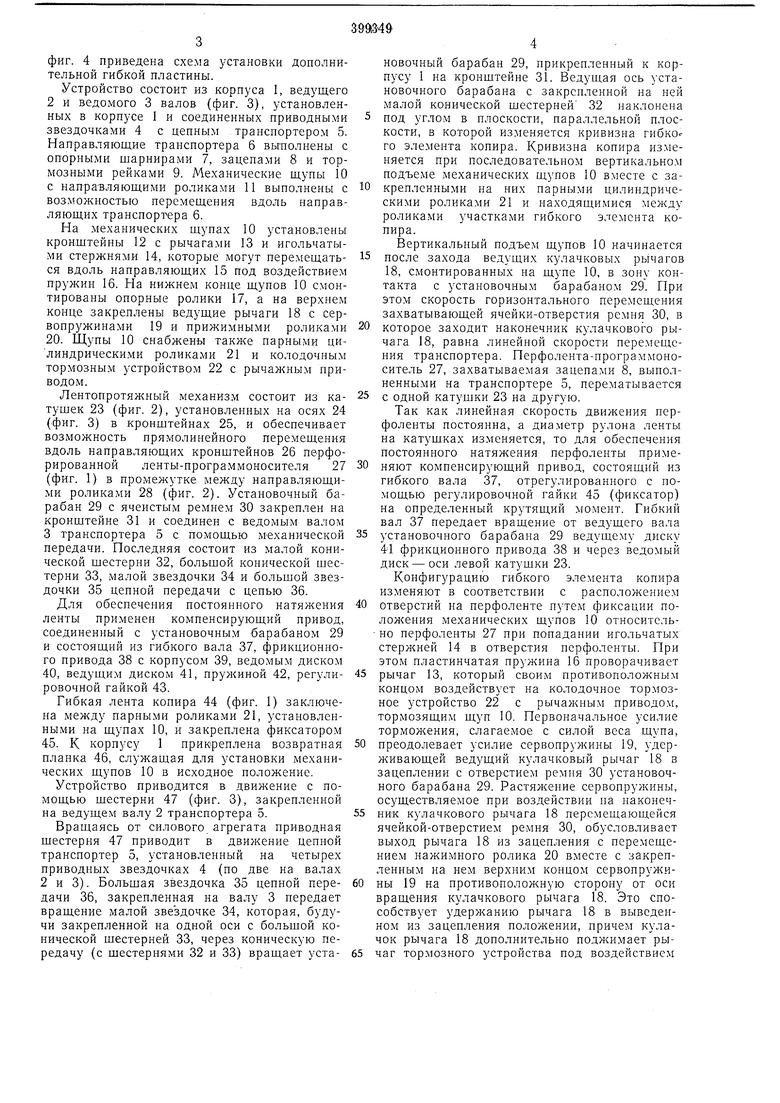
Устройство состоит из корпуса 1, ведущего
2и ведомого 3 валов (фиг. 3), установленных в корпусе 1 и соединенных приводными звездочками 4 с цепным транспортером 5. Направляющие транспортера 6 выполнены с опорными щарнирами 7, зацепами 8 и тормозными рейками 9. Механические щупы 10 с направляющими роликами 11 выполнены с возможностью перемещения вдоль направляющих транспортера 6.
На механических щупах 10 установлены кронштейны 12 с рычагами 13 и игольчатыми стержнями 14, которые могут перемещаться вдоль направляющих 15 под воздействием пружин 16. На нижнем конце щупов 10 смонтированы опорные ролики 17, а на верхнем конце закреплены ведущие рычаги 18 с сервопружинами 19 и прижимными роликами 20. ГЦупы 10 снабжены также парными цилиндрическими роликами 21 и колодочным тормозным устройством 22 с рычажным приводом.
Лентопротяжный механизм состоит из катушек 23 (фиг. 2), установленных на осях 24 (фиг. 3) в кронштейнах 25, и обеспечивает возможность прямолинейного перемещения вдоль направляющих кронщтейнов 26 перфорированной ленты-программоносителя 27 (фиг. 1) в промежутке между направляющими роликами 28 (фиг. 2). Установочный барабан 29 с ячеистым ремнем 30 закреплен на кронщтейне 31 и соединен с ведомым валом
3транспортера 5 с помощью м-еханической передачи. Последняя состоит из малой конической щестерни 32, большой конической щестерни 33, малой звездочки 34 и большой звездочки 35 цепной передачи с цепью 36.
Для обеспечения постоянного натяжения ленты применен компенсирующий привод, соединенный с установочным барабаном 29 и состоящий из гибкого вала 37, фрикционного привода 38 с корпусом 39, ведомым диском 40, ведущи.м диском 41, пружиной 42, регулировочной гайкой 43.
Гибкая лента копира 44 (фиг. 1) заключена между парными роликами 21, установленными на щупах 10, и закреплена фиксатором 45. К корпусу 1 прикреплена возвратная планка 46, служащая для установки механических щупов 10 в исходное положение.
Устройство приводится в движение с помощью шестерни 47 (фиг. 3), закрепленной на ведущем валу 2 транспортера 5.
Вращаясь от силового агрегата приводная шестерня 47 приводит в движение цепной транспортер 5, установленный на четырех приводных звездочках 4 (по две на валах 2 и 3). Большая звездочка 35 цепной передачи 36, закрепленная на валу 3 передает вращение малой звездочке 34, которая, будучи закрепленной на одной оси с большой конической шестерней 33, через коническую передачу (с шестернями 32 и 33) вращает установочный барабан 29, прикрепленный к корпусу 1 на кронштейне 31. Ведущая ось установочного барабана с закрепленной на ней малой конической шестерней 32 наклонена 5 под углом в плоскости, параллельной плоскости, в которой изменяется кривизна гибкого эле.мента копира. Кривизна копира из.меняется при последовательном вертикальном подъеме механических щупов 10 вместе с закрепленными на них парными цилиндрическими роликами 21 и находящимися между роликами участками гибкого элемента копира.
Вертикальный подъем щупов 10 начинается
15 после захода ведущих кулачковых рычагов 18, смонтированных на щупе 10, в зону контакта с установочным барабаном 29. При этом скорость горизонтального перемещения захватывающей ячейки-отверстия ремня 30, в
0 которое заходит наконечник кулачкового рычага 18, равна линейной скорости перемещения транспортера. Перфолента-программоноситель 27, захватываемая зацепами 8, выполненными на транспортере 5, перематывается
5 с одной катушки 23 на другую.
Так как линейная скорость движения перфоленты постоянна, а диаметр рулона ленты на катущках изменяется, то для обеспечения постоянного натяжения перфоленты применяют компенсирующий привод, состоящий из гибкого вала 37, отрегулированного с помощью регулировочной гайки 45 (фиксатор) на определенный крутящий момент. Гибкий вал 37 передает вращение от ведущего вала
5 установочного барабана 29 ведущему диску 41 фрикционного привода 38 и через ведомый диск - оси левой катушки 23.
Конфигурацию гибкого элемента копира изменяют в соответствии с расположением
0 отверстий на перфоленте путем фиксации положения механических щупов 10 относительно перфоленты 27 при попадании игольчатых стержней 14 в отверстия перфоленты. При этом пластинчатая пружина 16 проворачивает
5 рычаг 13, который своим противоположным концом воздействует на колодочное тормозное устройство 22 с рычажным приводом, тормозящим щуп 10. Первоначальное усилие торможения, слагаемое с силой веса щупа,
0 преодолевает усилие сервопружины 19, удерживающей ведущий кулачковый рычаг 18 в зацеплении с отверстием ремня 30 установочного барабана 29. Растяжение сервопружины, осуществляемое при воздействии па наконечник кулачкового рычага 18 перемещающейся ячейкой-отверстием ремня 30, обусловливает выход рычага 18 из зацепления с перемещением нажимного ролика 20 вместе с закрепленным на нем верхним концом сервопружи0 ны 19 на противоположную сторону от оси вращения кулачкового рычага 18. Это способствует удержанию рычага 18 в выведенном из зацепления положении, причем кулачок рычага 18 дополнительно поджимает рычаг тормозного устройства под воздействием
сервопружины 19, увеличивая усилие торможения.
После жесткой фиксации щупа и гибкого элемента копира 44, расположенного между парными -цилиндрическими роликами, положение щупа сохраняется неизменным.
Расстояние, которое проходят щупы 10 в установленном положении, составляет промежуток, равный расстоянию между четырьмя, пятью щупами. В этой зоне, которая называется зоной контроля, конфигурация копира соответствует конфигурации расположения отверстий на перфоленте. Фиксатор 45 удерживает правый конец гибкого элемента копира 44 неподвижно в нижнем положении. Поэтому парные цилиндрические ролики 21 от момента захвата копира до момента выхода из зоны контакта с копиром прокатываются по копиру. На выходе из контроля возвратная планка 46 возвращает кулачковые рычаги 18 в первоначальное положение, а перфолента выводится из зацепления с игольчатыми стержнями 14, которые затем, отжимаясь в исходное положение выступающей планкой возвращаются вместе со щупом во звратной планкой 46 в исходное положение.
Для осуществления многокоординатного (в, данном случае двухкоординатного) программирования на противоположном прямолинейном участке транспортера установлены гибкая лента копира 44 (фиг. 4), барабан 29 с ремнем 30 на кронштейне 31 с цепным и щестеренчатым приводами (32, 33, 34, 35) и фиксатор 45. Положение левой катущки 23 с приводом (37 и 38) изменено, она установлена (фиг. 4) на противоположном прямолинейном участке транспортера.
При двухкоординатном программировании на одном программоносителе отверстиями отмечены две различные программы, смещенные одна относительно другой на расстояние, равное половине щага между зацепами направляющих транспортера. Поэтому для одновременной работы двух гибких лент
44 по двум различным програм.мам необходимо смещение перфоленты относительно транспортера на величину, равную половине шага .между зацепами транспортера в промежутке между пластинами. Для этого шаг перфорации на перфоленте 27 должен быть равен половине шага между зацепами транспортера.
Смещение перфоленты может быть достигнуто выводом перфоленты из зацепления с зацепами 8 и смещения ее на величину, равную 0,5 шага между зацепами, путем установки двух дополнительных роликов 28 в промежутке .между гибкими лентами 44.
Предмет изобретения
1.Устройство для изменения конфигурации гибкого элемента копира, выполненное в виде программоносителя и контактирующих с ним установочных стержней, воздействующих на гибкую пластину, отличающееся тем, что, с целью упрощения программирующего органа, оно снабжено перфорированным программоносителем, укрепленным на лентопротялсном механизме, а гибкий элемент установлен между парными роликами, смонтированными на механических щупах, которые выполнены с возможностью перемещения по направляющим транспортера и снабжены игольчатыми стержнями, входящими в выполненные на программоносителе соответствующие отверстия при взаимодействии щупов е установочным барабаном.
2.Устройство по п. 1, отличающееся тем, что установочный барабан снабжен ремнем с отверстиями, перемещающим механические щупы вдоль направляющих транспортера.
3.Устройство по п. 1, отличающееся тем, что, с целью многокоординатного перемещения исполнительного органа с программным перемещением по каждой координате, оно снабжено дополнительными гибкими элементами, взаимодействующими с общим программоносителем.
25
г
Фиг.З
V
Фиг.
28
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для изменения конфигурации гибких элементов копиров | 1974 |
|
SU524674A2 |
| Устройство для программного управ-лЕНия пЕРЕМЕщЕНиЕМ иСпОлНиТЕльНыХОРгАНОВ | 1975 |
|
SU816736A1 |
| Навесный лубокомбайн для уборки и первичной обработки кенафа и конопли | 1956 |
|
SU108020A1 |
| Устройство смены рисунка по утку к бесчелночному ткацкому станку | 1983 |
|
SU1170015A1 |
| Автомат для завертки конфет"вперекрутку | 1974 |
|
SU516580A1 |
| МАШИНА ДЛЯ КРЕПЛЕНИЯ ТАБАЧНЫХ ЛИСТЬЕВ К ШНУРУ | 1968 |
|
SU218713A1 |
| АВТОМАТ ДЛЯ ЗАВЕРТЫВАНИЯ КОНФЕТ «ВПЕРЕКРУТКУ» | 1973 |
|
SU379462A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ РАЗМЕРОВ БАЛЛОНОВ ЭЛЕКТРОННОЛУЧЕВЫХ ТРУБОК | 1971 |
|
SU296173A1 |
| Устройство для укладки в коробки штучных предметов | 1972 |
|
SU440304A1 |
| Программное устройство | 1977 |
|
SU840848A1 |