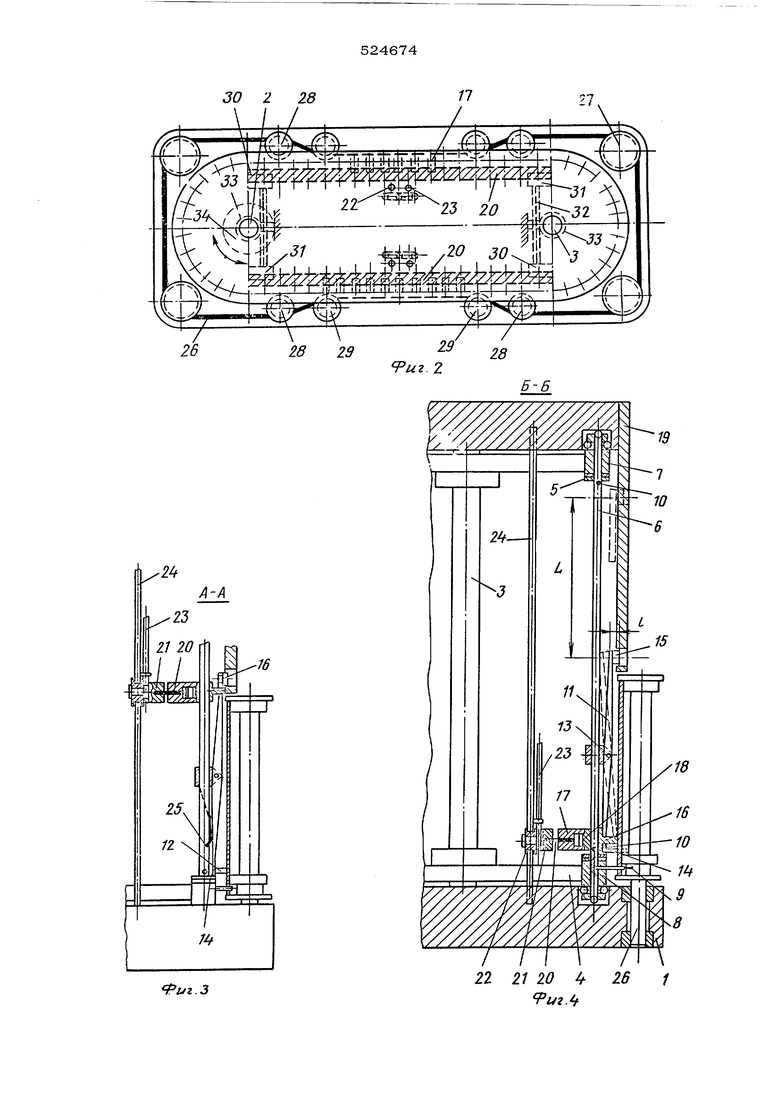
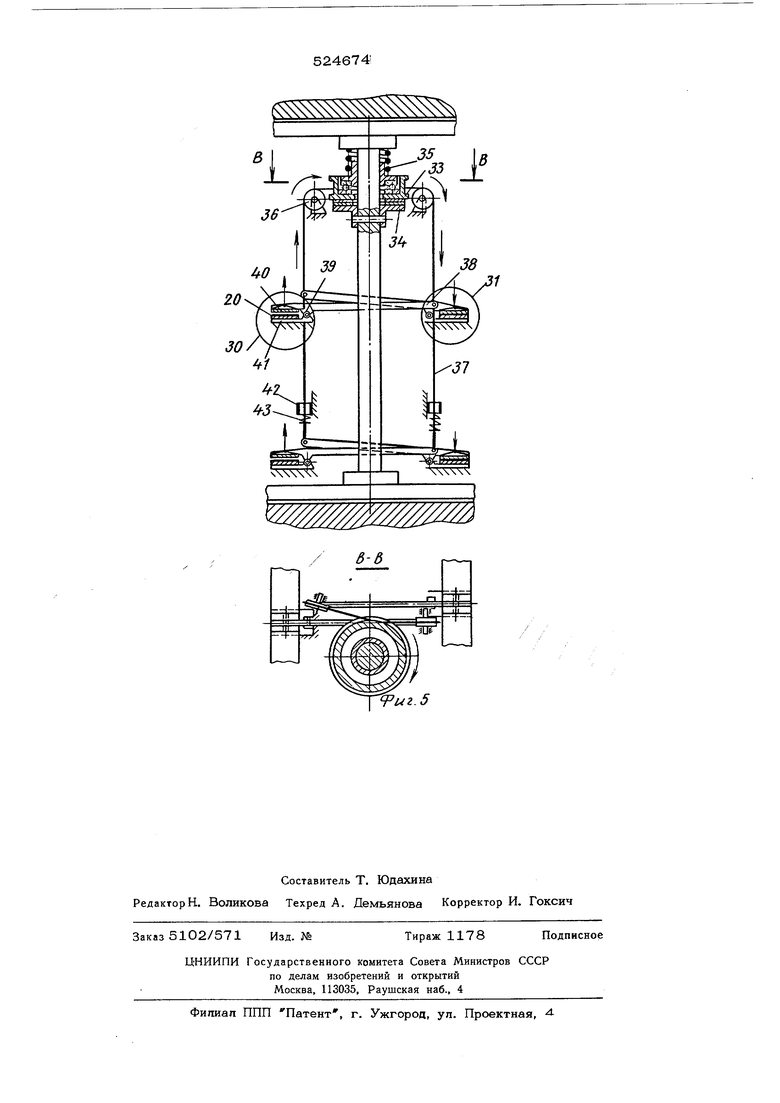
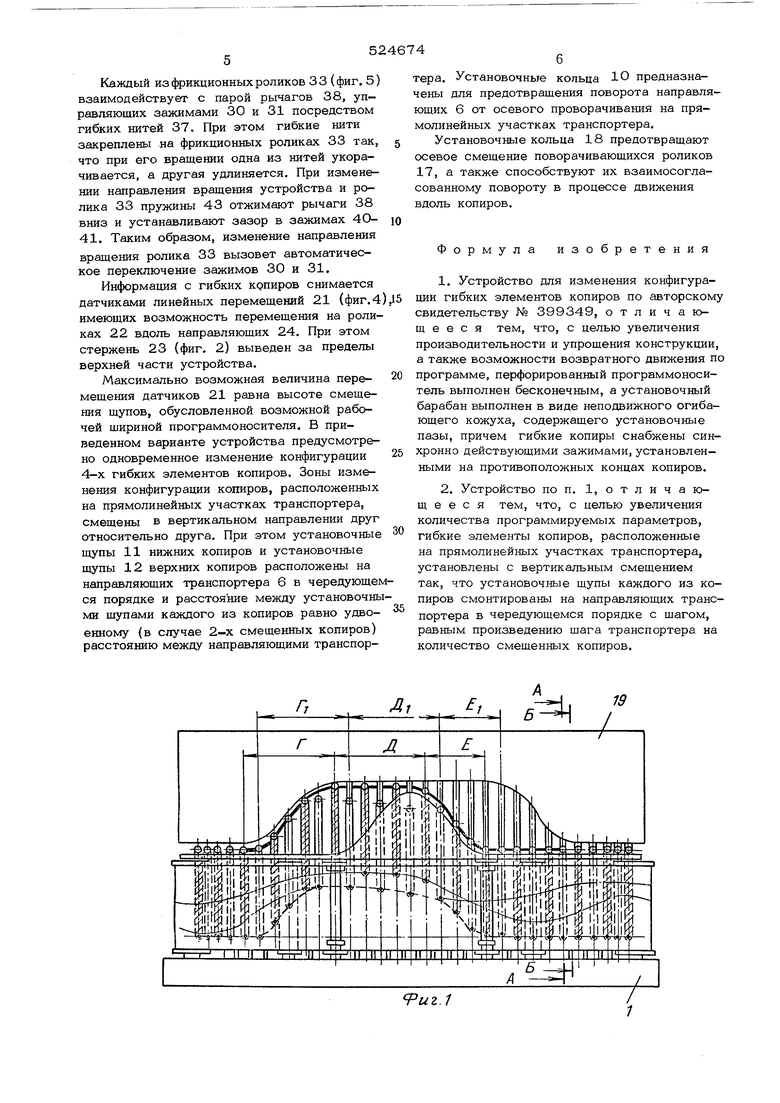
Гибкие элементы копиров установлены на прямолинейных участках транспортера с вертикальным смещением, установочные щупы каждого из копиров смонтированы на направляющих транспортера а чередующемся порядке с щагом чередования, равным произведению шага транспортера на количество смещенных копиров. На фиг, 1 показано предлагаемое устрой ство, вид спереди; на фиг. 2 - то же, вид сверху; на фиг. 3 - то же, поперечный раз рез по А-А; на фиг. 4 - то же, поперечный разрез по Б-Б; на фиг. 5 - схема рычажной системы с разрезом по В-В . Устройство состоит из корпуса 1 (фиг. 1 и 4), ведущего 2 и ведомого 3 валов (фиг. 2), установленных в корпусе 1 на подшипниках (условно не показанных) и соединенных жестко с приводными звездочками 4 (фиг. 4), контактирующими с депным транспортером 5. Направляющие 6 транспор тера выполнены с опорными щарнирами 7 (верхними) и 8 (нижними), зацепами 9 и установочными кольцами 1О. Механически щупы а и 12 (фиг. 3 и 4) установлены на кронштейнах 13 и содержат в нижней части игольчатые стержни 14, а в верхней подъемные ролики 15. Щупы выполнены с возможностью поворо та вокруг шарниров кронщтейнов 13 с пере мещением нижней (фиг. 4) или верхней (фиг. 3) частей щупов вдоль направляющих осей ползунов 16 (фиг. 3 и 4), на противо положных частях которых смонтированы поворачивающие ролики 17, удерживаемые от осевого перемещения и соединенные между собой установленными кольцами 18. Подъемные ролики 15 выполнены с возможностью перемещения полаклонным пазам огибающего кожуха 19. Гибкие копиры 20 смо тированы в пазах проворачивающихся роликов 17 и в пазах датчиков линейных перемещений 21, установленных на роликах 22 и выполненных с возможностью перемещения управляющих стержней 23 вдоль направляющих 24. На кронштейнах 13 смонтированы пластинчатые пружины 25 (фиг. 3), воздействующие на щупы 11 и 12 (фиг. 3 и 4). Перфорированный программоноситель 26 установлен на лентопротяжном механизме. включающем регулируемые ролики 27 (фиг. 2 натяжные ролики 28 и установочные ролики 29. Гибкие копиры 20 контактируют с зажи мами 30 и 31 (фиг. 2), соединенными с рычажной системой 32, контактирующей с фрикционными роликами 33, установленными на валах 2 и 3. Устройство приводится в движение с помощью приводной шестерни 34, установленной на ведущем валу 2 тран портера. Фрикционные ролики 33 контактируют с нажимными пружинами 35, Ролики 36 служат для направления гибких нитей 37, соединенных с горизонтальными рычагами 38, поворачивающихся относительно шарниров 39. Зажимы ЗО и 31 содержат верхние подвижные колодки 40 и нижние неподвижные колодки 41. Упоры 42 с нажцмной пружиной 43 взаимодействуют с рычагами 38. Устройство работает следующим образом. Получая вращение от силового агрегата, приводная шестерня 34 вращает ведущий вал 2, который приводит в движение цепной транспортер 5 посредством закрепленных на валу приводных звездочек 4. Подъемные ролики 15 механических щупов 11 и 12 в исходном положении располагаются в нижних горизонтальных пазах огибающего кожуха 19, а игольчатые стержни 14 упираются в программоноситель 26. Кривизна копиров 20 изменяется при последовательном вертикальном подъеме механических щупов 11 и 12 , которые перемещают поворачивающиеся ролики 17 вдоль направляющих транспортера 6. Поворачивающиеся ролики 17 воздействуют на копиры 20, изменяя их конфигурацию. Вертикальный подъем щупов 11 и 12 начинается после захода ;подъемных роликов 15 на наклонные нижние части пазов огибающего кожуха 19. При вращении ведущего вала 2 по часовой стрелке (фиг. 2) зонами установки являются зоны Е и Е , а при вращении против часовой стрелки - зоны Г и Г, Изменение конфигурации гибкого элемента копира в соответствии с расположением отверстий на программоносителе (перфоленте) осуществляется путем фиксации положений механических щупов 11 и 12 относительно программоносителя 26, при попадании механических щупов 11 и 12 относительно перфоленты 26, при попадании игольчатых стержней 14 в отверстия перфоленты. При этом пластинчатые пружины 25 поворачивают рычаги 11 и 12 против часовой стрелки (фиг. 4) на дугу б , выводя подъемные ролики 15 из зацепления с пазом огибающего кожуха 19. В зафиксированном положении щупы удериваются пластинчатыми пружинами контроля и Д-j (фиг. 1). При выходе из зоны контроя игольчатые стержни 14 щупов, смещаясь в зону между установочным 29 и натяжным 28 роликами (фиг. 2) выходят из зацепления с перфолентой и сначала под действием силы тяжести, а затем отжимаемые верхней частью паза установочного кожуха, озвращаются в исходное нижнее положение. Каждый из фрикционных роликов 33 (фиг, 5) взаимодействует с парой рычагов 38, управляющих зажимами 30 и 31 посредством гибких нитей 37. При этом гибкие нити закреплены на фрикционных роликах 33 так, что при его вращении одна из нитей укорачивается, а другая удлиняется. При изменении направления вращения устройства и ролика 33 пружины 43 отжимают рычаги 38 вниз и устанавливают зазор в зажимах 4041. Таким образом, изменение направления вращения ролика 33 вызовет автоматическое переключение зажимов 30 и 31. Информация с гибких крпиров снимается датчиками линейных перемещений 21 (фиг.4 имеющих возможность перемещения на роликах 22 вдоль направляющих 24. При этом стержень 23 (фиг. 2) выведен за пределы верхней части устройства. Максимально возможная величина перемещения датчиков 21 равна высоте смещения щупов, обусловленной возможной рабочей шириной программоносителя. В приведенном варианте устройства предусмотрено одновременное изменение конфигурации 4-х гибких элементов копиров. Зоны изменения конфигурации копиров, расположенных на прямолинейных участках транспортера, смещены в вертикальном направлении друг относительно друга. При этом установочные щупы 11 нижних копиров и установочные щупы 12 верхних копиров расположены на направляющих транспортера 6 в чередующе ся порядке и расстояние между установочны ми щупами каждого из копиров равно удвоенному (в случае 2-х смещенных копиров) расстоянию между направляющими транспорера. Установочные кольца Ю предназнаены для предотвращения поворота направляющих 6 от осевого проворачивания на прямолинейных участках транспортера. Установочные кольца 18 предотвращают осевое смещение поворачивающихся роликов 17, а также способствуют их взаимосогласованному повороту в процессе движения вдоль копиров. Формула изобретения 1. Устройство для изменения конфигурации гибких элементов копиров по авторскому свидетельству № 399349, о т л и ч а ющ е е с я тем, что, с целью увеличения производительности и упрощения конструкции, а также возможности возвратного движения по программе, перфорированный программоноситель выполнен бесконечным, а установочный барабан выполнен в виде неподвижного огибающего кожуха, содержащего установочные пазы, причем гибкие копиры снабжены синхронно действующими зажимами, установленными на противоположных концах копиров. 2. Устройство по п. 1, о т л и ч а ющ е е с я тем, что, с целью увеличения количества программируемых параметров, гибкие элементы копиров, расположенные на прямолинейных участках транспортера, установлены с вертикальным смещением так, что установочные щупы каждого из копиров смонтированы на направляющих транспортера в чередующемся порядке с щагом, равным произведению щага транспортера на количество смещенных копиров. 30 2
-2
А-А
16
иг.З
19
26 1 28
Vuz.S
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕНЕНИЯ КОНФИГУРАЦИИ ГИБКОГО | 1973 |
|
SU399349A1 |
| Устройство для программного управ-лЕНия пЕРЕМЕщЕНиЕМ иСпОлНиТЕльНыХОРгАНОВ | 1975 |
|
SU816736A1 |
| Автоматическая линия для изготовления пружин | 1980 |
|
SU929403A1 |
| АВТОМАТ ДЛЯ ЗАВЕРТЫВАНИЯ КОНФЕТ «ВПЕРЕКРУТКУ» | 1973 |
|
SU379462A1 |
| Автомат для завертки конфет"вперекрутку | 1974 |
|
SU516580A1 |
| Стегальная швейная машина | 1980 |
|
SU931847A1 |
| Устройство для транспортирования пассажиров с одного уровня на другой | 1978 |
|
SU783175A1 |
| Устройство для отсчета углов поворота гибочного шаблона трубогибочной машины | 1975 |
|
SU617111A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ РАЗМЕРОВ БАЛЛОНОВ ЭЛЕКТРОННОЛУЧЕВЫХ ТРУБОК | 1971 |
|
SU296173A1 |
| Шаговый конвейер-накопитель | 1985 |
|
SU1313774A1 |