(54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕНЕНИЯ КОНФИГУРАЦИИ ГИБКОГО | 1973 |
|
SU399349A1 |
| УСТРОЙСТВО ДЛЯ БЕЗОСТАНОВОЧНОЙ ПОПЕРЕЧНОЙ РЕЗКИ ГОФРОКАРТОНА | 2004 |
|
RU2257282C1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ЭТИКЕТОК | 2006 |
|
RU2306244C1 |
| Устройство для изменения конфигурации гибких элементов копиров | 1974 |
|
SU524674A2 |
| Устройство для нанесения клея на кромки обувных деталей из мягких материалов | 1990 |
|
SU1784202A1 |
| Устройство для намотки ленты на катушку на текстильных машинах | 1966 |
|
SU268949A1 |
| Способ изготовления обрезиненного кордного полотна и устройство для его осуществления | 1977 |
|
SU736866A3 |
| УСТРОЙСТВО ДЛЯ ПОПЕРЕЧНОЙ РЕЗКИ ГОФРОКАРТОНА | 2003 |
|
RU2255840C1 |
| Устройство для подачи многослойного настила к вырубочному прессу | 1981 |
|
SU1066925A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ПРОИЗВОДСТВА БАРАНОЧНЫХ ИЗДЕЛИЙ | 1965 |
|
SU214451A1 |
1
Изобретение относится к автомати ке и предназначено для осуществления программного перемещения объектов.
Известно устройство для осуществления программного перемещейия объектов, содержащее программоноситель, установленный на лентопротяжном механизме, гибкие элементы, которые установлены между парньми цилиндрическими роликами, установленными на стержнях с игольчатыми фиксаторами, имеющими возможность перемещения по направляющим транспортера, и наклонные установочные планки 1.
Недостаток известных устройств сложность.
Наиболее близким к предлагаемому по технической сущности является устройство, содержащее корпус с установленными в нем ведомым и ведущим валами, которые через приводные звездочки связаны с цепным транспортером датчик перемещений, укрепленный на стержне и связанный с гибкой плас1;иной, установленной в поворотных цилиндрических роликах, закрепленных на транспортере, на котором с помощью одного из кронштейнов установлены подвижные установочные стержни с тормозными колодками, защелками и
фиксаторами., например, в виде игольчатых стержней, лентопротяжный механизм с роликами и эластичной лентой и задающий элемент 2.
Недостаток этого устройства заключается в сложности, вызванной сложной конструкцией задающего элемента, а следовательно, в низкой надежности и быстродействии.
0
Цель изобретения - упрощение устройства.
Поставленная цель достигается тем, что задающий-элемент выполнен
5 в виде винта, закрепленного на втором кронштейне с помощью стопорного кольца, и подвижной гайки, на которой закреплены установочные планки, с помощью которых винт кинематичес0ки связан с приводом транспортера и датчиком перемещения.
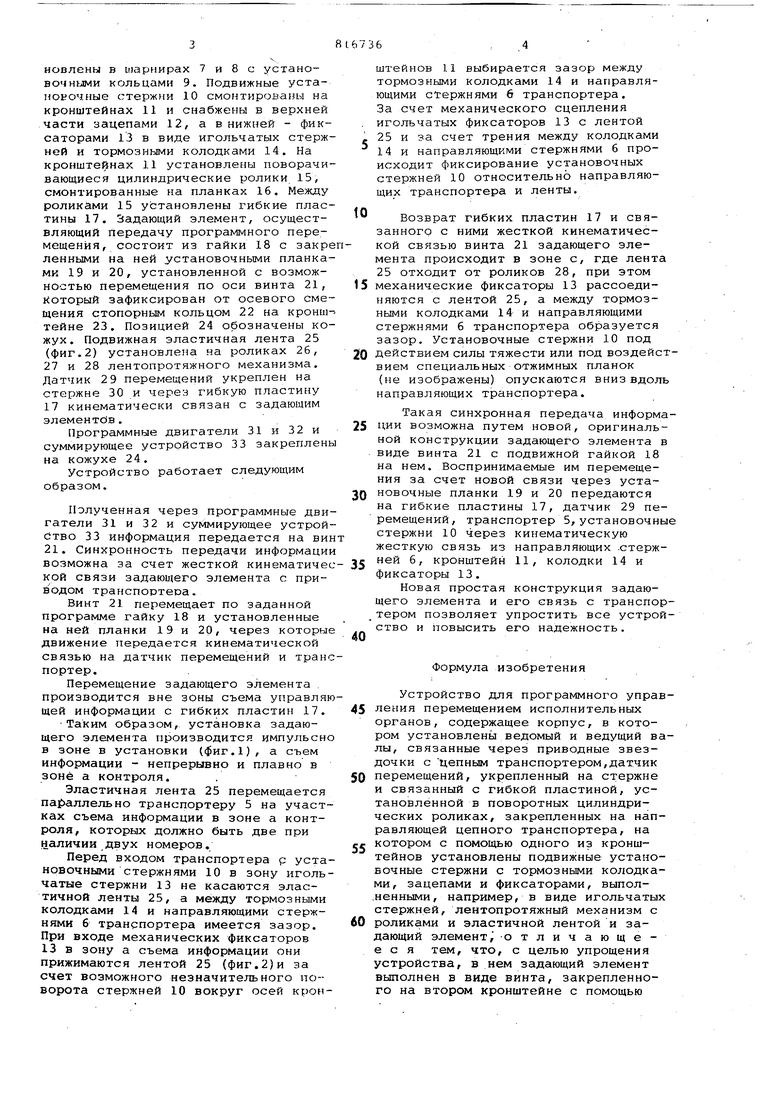
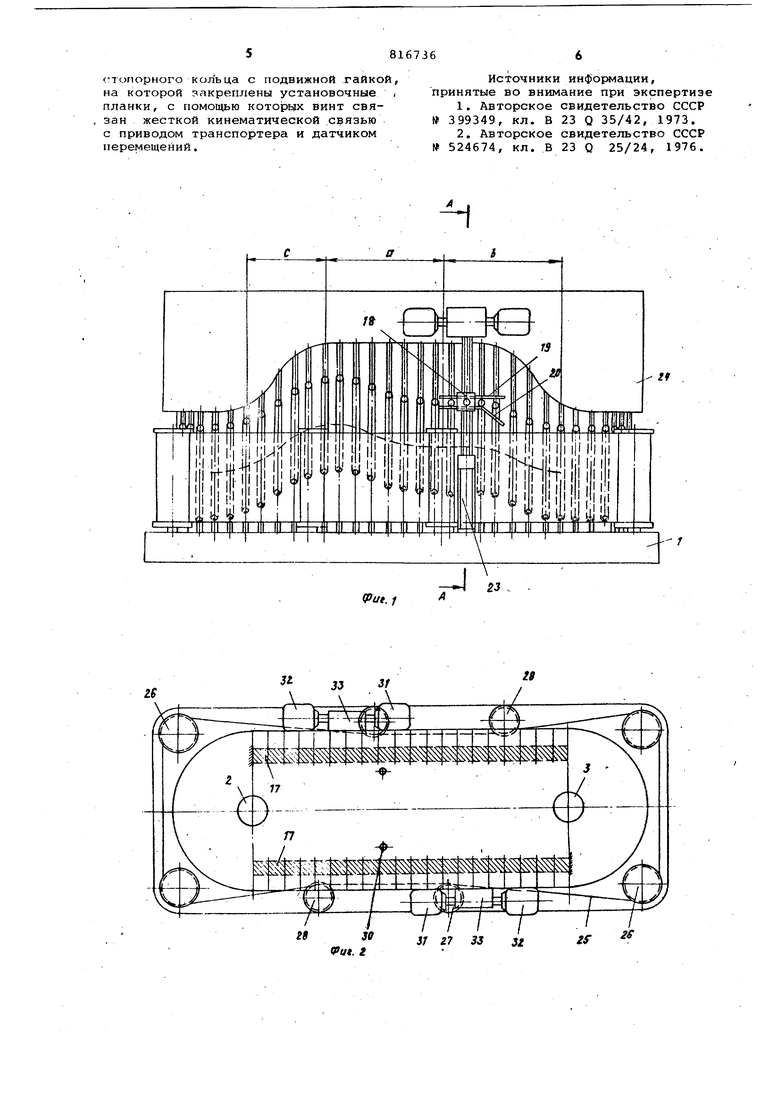
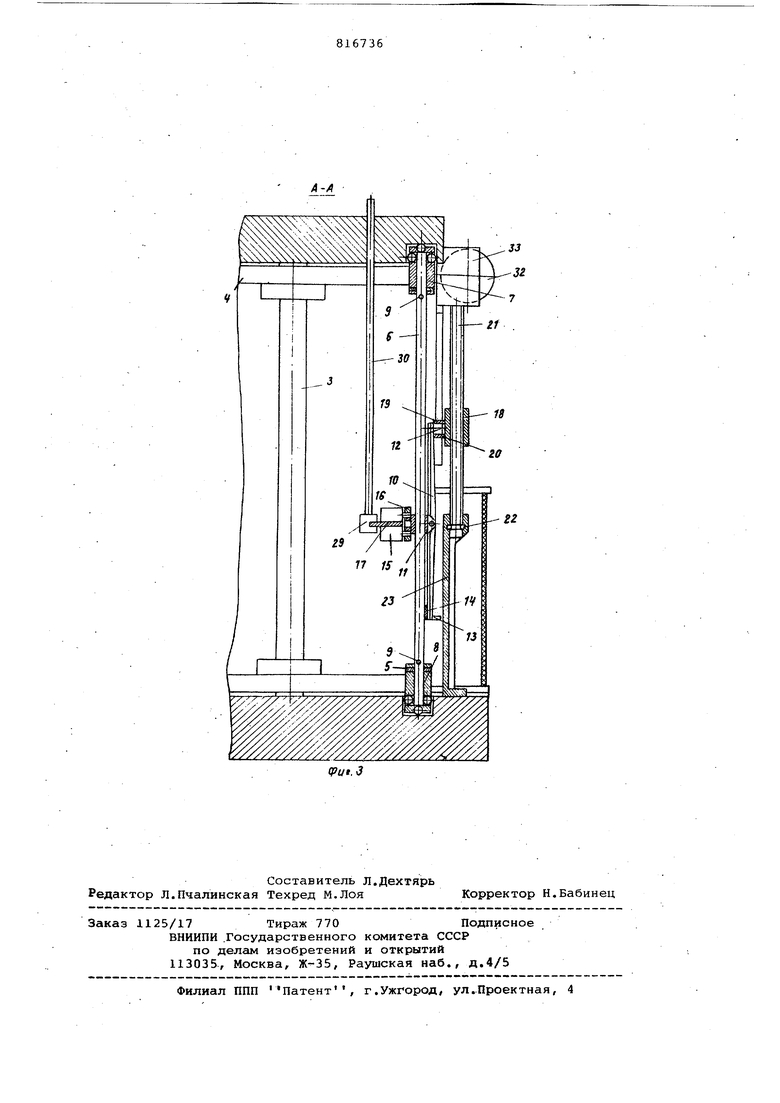
На фиг.1 показано устройство, общий вид; на фиг.2 - то же, вид сверху; на фиг.З - разрез А-А на
5 фиг.1.
Устройство состоит из корпуса 1, ведущего 2 и ведомого 3 валов,соединенных через приводные звездочки 4 с цепным транспортерсни 5. Направляющие стержни 6 транспортера уста-.
0
новлены в шарнирах 7 и 8 с устаноBO4HtJMH кольцами 9. Подвижные устаиоЕочные стержни 10 смонтированы на кронштейнах 11 и снабжены в верхней части зацепами 12, а в нижней - фиксаторами 13 в виде игольчатых стержней и тормозными колодками 14. На кронштейнах 11 установлены поворачивающиеся цилиндрические ролики 15, смонтированные на планках 16. Между роликами 15 установлены гибкие пластины 17. Задающий элемент, осуществляющий Передачу программного перемещения, состоит из гайки 18 с закреленными на ней установочньтми планками 19 и 20, установленной с возможностью перемещения по оси винта 21, Который зафиксирован от осевого смещения стопорным кольцом 22 на кронштейне 23. Позицией 24 обозначены кожух. Подвижная эластичная лента 25 (фиг.2) установлена на роликах 26, 27 и 28 лентопротяжного механизма. Датчик 29 перемещений укреплен на стержне 30 и через гибкую пластину 17 кинематически связан с задающим элементс1В .
Программные двигатели 31 и 32 и суммирующее устройство 33 закреплены на кожухе 24.
Устройство работает следующим образом.
Полученная через программные двигатели 31 и 32 и суМмирующее устройство 33 информация передается на вин 21. Синхронность передачи информации возможна за счет жесткой кинематической связи задающего элемента с приводом транспортера.
Винт 21 перемещает по заданной программе гайку 18 и установленные на ней планки 19 и 20, через которые движение передается кинематической связью на датчик перемещений и транспортер.
Перемещение задающего элемента производится вне зоны съема управляющей информации с гибких пластин 17.
Таким образом, установка задающего элемента производится импульсно в зоне в установки (фиг.1), а съем информации - непрерывно и плавно в зоне а контроля.
Эластичная лента 25 перемещается параллельно транспортеру 5 на участках съема информации в зоне а контроля, которых должно быть две при наличии двух номеров.
Перед входом транспортера р установочными стержнями 10 в зону игольчатые стержни 13 не касаются эластичной ленты 25, а между тормозными колодками 14 и направляющими стержнями б транспортера имеется зазор. При входе механических фиксаторов 13 в зону а съема информации они прижимаются лентой 25 (фиг.2)и за счет возможного незначительного поворота стержней 10 вокруг осей кронштейнов 1.1 выбирается зазор между тормозными колодками 14 и направляющими стержнями 6 транспортера. За счет механического сцепления . игольчатых фиксаторов 13 с лентой , 25 и за счет трения между колодками 14 и направляющими стержнями 6 происходит фиксирование установочных стержней 10 относительно направляющих транспортера и ленты.
Возврат гибких пластин 17 и связанного с ними жесткой кинематической связью винта 21 задающего элемента происходит в зоне с, где лента 25 отходит от роликов 28, при Этом
5 механические фиксаторы 13 рассоединяются с лентой 25, а между тормознЕзМи колодками 14 и направляющими стержнями б транспортера образуется зазор. Установочные стержни 10 под
0 действием силы тяжести или под воздействием специальных отжимных планок (не изображены) опускаются вниз вдоль направляющих транспортера.
Такая синхронная передача информа5 дни возможна путем новой, оригинальной конструкции задающего элемента в виде винта 21 с подвижной гайкой 18 на нем. Воспринимаемые им перемещения за счет новой связи через устаQ новочные планки 19 и 20 передаются на гибкие пластины 17, датчик 29 перемещений, транспортер 5, установочные стержни 10 через кинематическую жесткую связь из направляющих .стержней 6, кронштейн 11, колодки 14 и фиксаторы 13.
Новая простая конструкция задающего элемента и его связь с транспортером позволяет упростить все устройство и Повысить его надежность.
Формула изобретения
Устройство для программного управления перемещением исполнительных органов, содержащее корпус, в котором установлены ведомый и ведущий валы, связанные через приводные звездочки с цепным транспортером,датчик
перемещений, укрепленный на стержне и связанный с гибкой пластиной, установленной в поворотных цилиндрических роликах, закрепленных на направляющей цепного транспортера, на
котором с помощью одного из кронштейнов установлены подвижные установочные стержни с тормозными колодками, зацепами и фиксаторами, выпол.ненными, например, в виде игольчатых стержней, лентопротяжный механизм с
роликами и эластичной лентой и задающий элементj -отличающееся тем, что, с целью упрощения устройства, в нем задающий элемент вьтолнен в виде винта, закрепленного на втором кронштейне с помощью
попорного кольца с подвижной гайкой, на которой закреплены установочные / планки, с помощью которых винт связан жесткой кинематической .связью с приводом транспортера и датчиком перемещений.
Источники информации, принятые во внимание при экспертизе
