I
Изобретение относится к области народного хозяйства, где применяются фазовые системы ирограммного управления, в частности к металлорежущим станкам с числовым программным управлением, и может быть применено для записи программ на магнитную ленту по макету поверхпости детали или по другой детали.
Известно устройство для записи на магнитную ленту программы управления станком с фазовой системой числового программного управления, содержащее блоки управления приводами подач по координатам X, Y и Z с цепями обратной связи, выполненными из редусина, вращающихся трансформаторов обратной связи и ручных перемещений, размыкающего контакта, вращающегося трансформатора скоростных перемещений, замыкающего контакта и усилителя вращающихся трансформаторов, состоящие из фазового дискриминатора, соединенного через усилитель постоянного тока с соответствующим силовым приводом, генератор эталонного сигнала, связанный с цепями обратной связи, фазовыми дискриминаторами и одной из магнитных головок лентопротяжного механизма, другие магнитные головки которого соединены через усилители записи с цепями обратной связи соответствующих блоков управления приводами подач, и копировальную головку. Однако это устройство ненадежно в работе и не позволяет получить качественную запись программ. Предлагаемое устройство отличается от известных тем, что в нем копировальная головка выполнена в виде пальца с размерами и формой рабочего инструмента, взаимодействующего через редуктор с жестко закрепленным на неподвижной части стапка редусином, соединенным через усилитель с вращающимся трансформатором обратной связи, а выход редусипа подключен к входу вращающегося трансформатора ручного перемещения, цепи обратной связи блока управлеПИЯ приводом подач и силового нривода по оси Z, обеспечивая падежную работу и высокое качество записываемых программ.
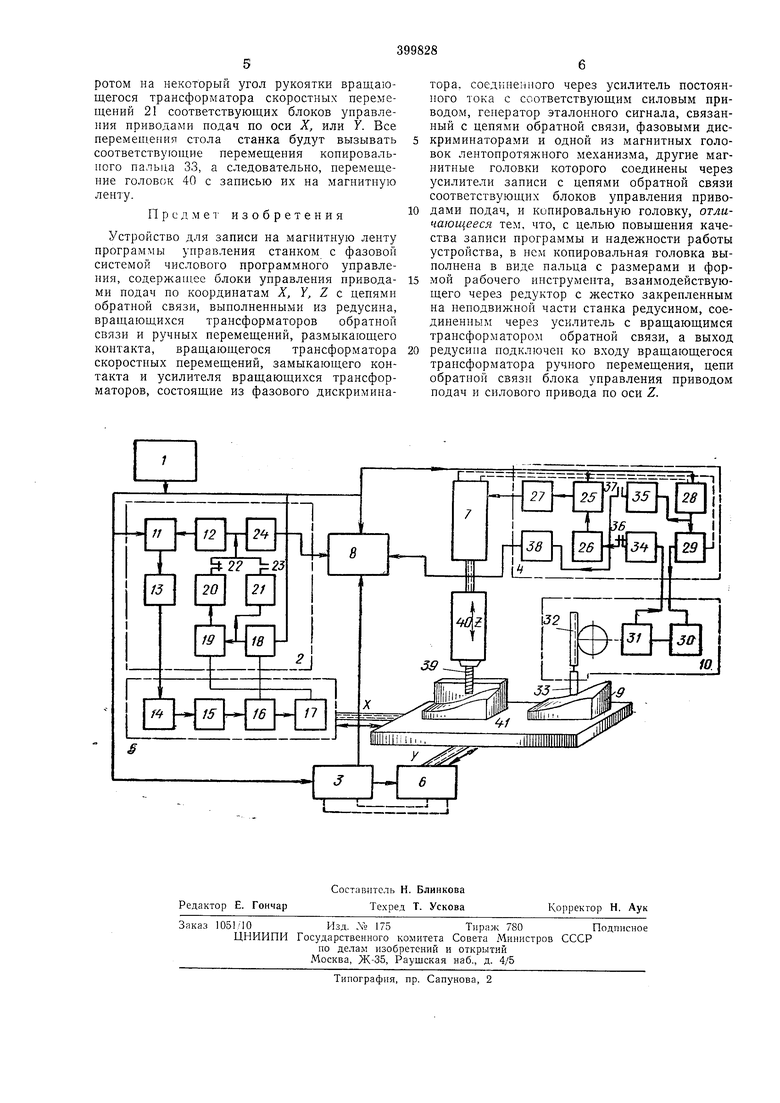
На чертеже изображена функциональная схема устройства. Она содержит генератор
эталонного сигнала 1, блоки управления приводами подач 2, 3, 4 по осям X, Y, Z соответственно, силовые приводы 5, б, 7 по осям X, Y, Z соответственно, лентопротяжный механизм с головками магнитной заппси 8, макет
обрабатываемой поверхности 9 и копировальную головку 10. Блоки управления приводами подач 2 и 3 по осям X, У BbinOvinenbi идентично и содержат фазовый дискриминатор 11, усилитель вращающегося трансформатора
12, усилитель постоянного тока 13. Силовые
приводы 5, 6, 7, выполненные идентично, содержат электромеханический преобразователь 14, золотник управления 15, насосную станцию 16, гидродвигатель 17, редусин 18, вращающийся трансформатор обратной связи 19, вращающийся трансформатор ручного перемещения 20, вращающийся трансформатор скоростного перемещения 21, замыкающий контакт 22 и размыкающий контакт 23 составляют цепь обратной связи между силовым приводом 5 и фазовым дискриминатором 11, и усилитель записи 24.
Блок управления приводом подач 4 по оси Z содержит фазовый дискриминатор 25, усилитель вращающегося трансформатора 26, усилитель постоянного тока 27, редусин 28, вращающийся трансформатор обратной связи 29, усилитель 30, редусин 31 копировальной головки 10, состоящий из редуктора 32 со следящим пальцем 33, вращающиеся трансформаторы ручного перемещения 34 и скоростных перемещений 35, замыкающий контакт 36 и размыкающий контакт 37, которые составляют цепь обратной связи между силовым приводом 7 и фазовым дискриминатором 25, и усилитель записи 38.
Кроме этого на функциональной схеме показана фреза 39, подвижная головка щнинделя 40 и заготовка детали 41.
Работа устройства происходит следующим образом. На столе станка под копировальной головкой 10 устанавливают макет 9 и под фрезой 39 заготовку 41. Копировальный палец 33 опускают до соприкосновения с поверхностью макета 9. После включения силовых приводов 5, 6, 7 и лентопротяжного механизма 8 производят вспомогательное перемещение фрезы по координате Z на необходимую величину, для врезания ее в материал заготовки 41 круговым вращением рукоятки вращающегося трансформатора ручных перемещений 34. При этом фазовый угол сигнала на его выходе будет иметь некоторое рассогласование с фазой эталонного сигнала.
Оба сигнала записываются на магнитную ленту, эталонный сигнал непосредственно, а рабочий сигнал через усилитель записи 38, и поступают на вход фазового дискриминатора 25, на выходе которого появляется напряжение рассогласования. Это напряжение поступает на вход силового привода 7, вызывая перемещение подвижной головки 40 щпинделя станка. Вращающийся трансформатор обратной связи 29 осуществляет обратную связь по положению головки 40, а редусин 28 стабилизирует работу силового привода 7. По достижении заданного положения рукоятку вращающегося трансформатора ручных перемещений 34 вращать прекращают и вращающийся трансформатор обратной связи 29 приводит к исчезновению фазового угла рассогласования на входе фазового дискриминатора 25, что вызывает останов головки 40.
Для ускоренного перемещения головки 40 поворачивают рукоятку вращающегося трансформатора скоростных перемещений 35 на некоторый угол. При этом контакт 36 размыкается, отключая обратную связь по положению, а контакт 37 замыкается. На вход фазового дискриминатора 25 поступает постоянный сигнал фазового рассогласования, который параллельно записывается через усилитель записи 38 на магнитную ленту.
Для остановки головки 40 рукоятку вращающегося трансформатора скоростных перемещений 35 устанавливают в нулевое положение, контакт 37 размыкается, а контакт 36 замыкается. В зависимости от положения следящего пальца 33 копировальной головки 10 производят вращение рукоятки вращающегося трансформатора ручных перемещений 20 в блоке управления подачами 2 или 3. При вращении рукоятки вращающегося трансформатора ручных перемещений 20 фазовый угол сигнала с его выхода будет иметь рассогласование с фазой эталонного сигнала. Q6a сигнала записываются на магнитную ленту, эталонный сигнал непосредственно, а рабочий сигнал с усилителя записи 24, и поступают на вход фазового дискриминатора И, на выходе которого появляется напряжение рассогласования. Это напряжение поступает на вход силового привода 5 или 6, вызывая перемещение стола и установленных на нем макета 9 и заготовки 41 по координате X или У. Вращающийся трансформатор обратной связи 19 осуществляет обратнуЕО связь по положению стола по X или по 5. а редусин 18 стабилизирует работу соответствующего гидропривода.
Движение макета вызовет перемещение следящего пальца 33, связанного с редуктором 32 копировальной головки 10, вверх или вниз. Редуктор 32 преобразует линейные перемещения следящего пальца 33 во вращательное движение ротора редусина 31.
При вращении ротора редусина 31 фазовый угол сигнала с выхода редусина будет иметь некоторое рассогласование с эталонным сигналом. Оба сигнала записываются на магнитную ленту и одновременно поступают на вход фазового дискриминатора 25, на выходе которого появляется напряжение рассогласования. Это напряжение поступает на вход силового привода 7, вызывая соответствующее перемещение подвижной головки 40 шпинделя станка, т. е. фрезы 39. Движение стола с установленным макетом 9 и заготовкой детали 41 будет продолжаться до достижения копировальным пальцем 33 границы макета 9.
В зависимости от конфигурации макета в плане (плоскость X-У) управление движением станка осуществляют либо вращением рукоятки вращающегося трансформатора ручных перемещений 20 блоков управления приводами подач 2 или 3, либо, в случае ускоренного перемещения стола станка, поворотом на некоторый угол рукоятки вращающегося трансформатора скоростных перемещений 21 соответствующих блоков управления приводами подач по оси X, или У. Все перемещения стола станка будут вызывать соответствующие перемещения копировального пальца 33, а следовательно, перемещение головок 40 с записью их на магнитную ленту.
Предмет изобретения
Устройство для записи иа магнитную лепту программы управления станком с фазовой системой числового программного управления, содержащее блоки управления приводами подач по координатам X, У, Z с. цепями обратной связи, выполненными из редусина, вращающихся трансформаторов обратной связи и ручных перемещений, размыкающего контакта, врап ающегося трансформатора скоростных перемещений, замыкающего контакта и усилителя вращающихся трансформаторов, состоящие из фазового дискриминатора, соединенного через усилитель постоянного тока с соответствующим силовым приводом, генератор эталонного сигнала, связанный с цепями обратной связи, фазовыми дискримипаторами и одной из магнитных головок лентопротяжного механизма, другие магнитные головки которого соединены через усилители записи с цепями обратной связи соответствующих блоков управления приводами подач, и копировальную головку, отличающееся тем, что, с целью повыщения качества записи программы и надежности работы устройства, в нем копировальная головка выполнена в виде пальца с размерами и формой рабочего инструмента, взаимодействующего через редуктор с жестко закрепленным на неподвижной части станка редусином, соединенным через усилитель с вращающимся трансформатором обратной связи, а выход
редуснна подключен ко входу вращающегося трансформатора ручного перемещения, цепи обратной связи блока управления приводом подач и силового привода по оси Z.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для записи на магнитнуюлЕНТу пРОгРАММы упРАВлЕНия CTAHKOM СфАзОВОй СиСТЕМОй чиСлОВОгО пРОгРАММНОгОупРАВлЕНия | 1979 |
|
SU849149A2 |
| Многоканальное устройство для программного управления | 1978 |
|
SU750438A1 |
| УСТРОЙСТВО для СИНХРОНИЗАЦИИ СТАНКОВ с ФАЗОВОЙ СИСТЕМОЙ ЧИСЛОВОГО ПРОГРАММНОГО УПРАВЛЕНИЯ | 1973 |
|
SU408275A1 |
| Самонастраивающаяся система программного управления | 1984 |
|
SU1302240A1 |
| СИСТЕМА УПРАВЛЕНИЯ КОПИРОВАЛЬНЫМ СТАНКОМ | 1973 |
|
SU377727A1 |
| Устройство для коррекции эквидистанты в фазовых системах числового программного управления | 1973 |
|
SU482725A1 |
| Устройство для управления металлорежущим станком | 1978 |
|
SU746421A1 |
| ВСЕСОЮЗНАЯ ПДПНТКО-ТЕХНННЕСНАЯьНЬЛРЮТЕКА | 1971 |
|
SU302724A1 |
| Устройство для программного управления станками | 1976 |
|
SU579598A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ МЕТАЛЛОРЕЖУЩИМИ СТАНКАМИ | 1972 |
|
SU326556A1 |
