1
РТзобретеиие относится к п-риборам и системам автоматического регулирова ния и можгт быть использоваНО в контурах самостройки Си стем бесиоиоковой градиентной оптимизации с существенными нелинейностями и всистемах парам етри ч еского ко нтр о л я.
Известны устройсгва, содержащие генератор, подключенный КО .входу модели системь, состоящей из последовательно .включен:ныА линейных звеньев и нелинейного блока; модель чувствительности системы, содержащую последовательно включенные линейные звенья и усилитель с управляемым коэффициентом усиления, 1Причем вход каждого линейного звена мoдeJ:и системы подключен через вычислительиый блок к ВЫХОДУ соответствующего звена модели чуВСтвительпости системы. Такие устройства не -позволяют определять функци чувствительности систем регулирования, содержащих многозначные, пестадиоиарные, неси.мметричные нелинейные элементы.
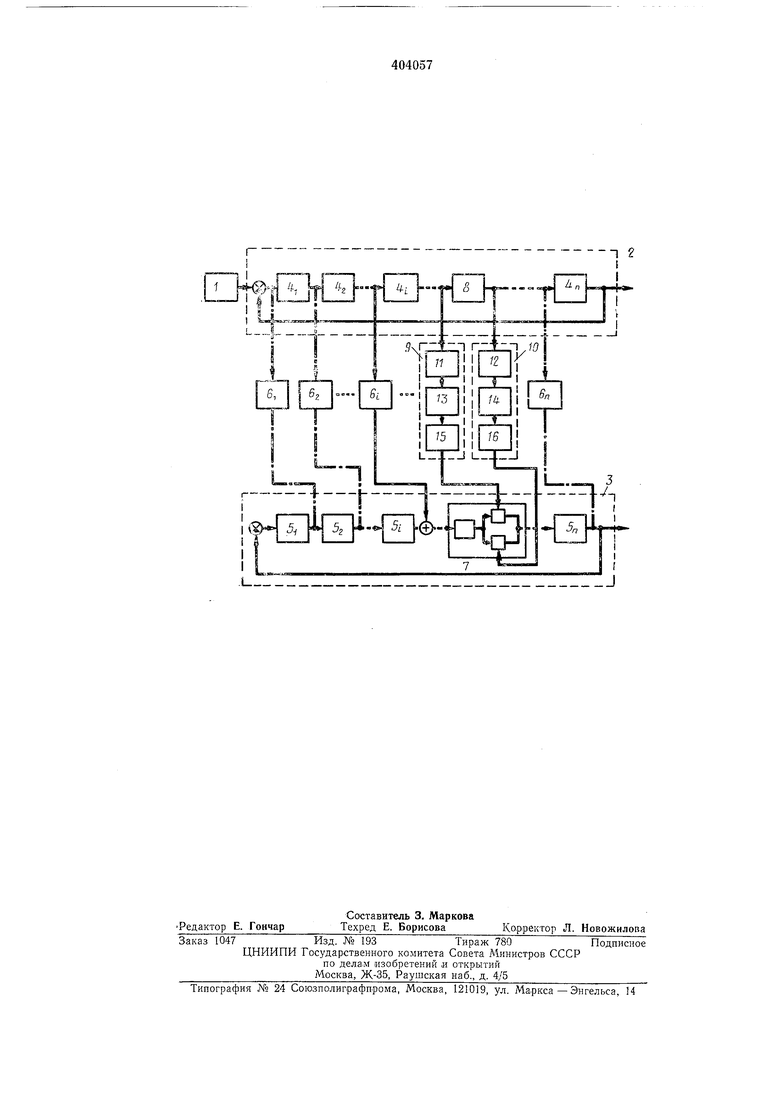
Предлагаемое устройство отличается от извсст1-И)1х тем, что в него введслы две цепи, каждая из которых содержит последовательно соедииепиые дифференцирующее звеио, блок определения модуля и нуль-орган; входы первой И второй цепи подключены, соответственно, ,ко входу и выходу пели1ией ого блока модели Системы, а выходы - « первому и второму управляющему входу усилителя с уп-равляемым коэффициентом усиления. Такое кэстроение устройства позволяет расширить класс а-иализируемых нелинейных систем. На чертеже приведена блок-схема устройства.
Устройство содержит генератор /, модель системы 2, модель чувствительности системы 3, линейные звенья , 5|-5п, вычислительиые блоки 6i-6,1, усилитель 7 с управляемым коэффициентом усиления, :блок иелинейности 8, цепи 9, 10, дифференцирующие звенья //, 12, блоки определения модуля 13, 14, нуль-органы /5, 16.
Устройство работает следующим образом.
В режиме на линейной части статическом характеристики выходная координата нелииейиого блока является лИнейной функцией входной Координаты. В этом случае }1елинейный элемент не вносит «икаких искажений в форму входного сигнала, кроме фазовых. Существова ние первой ироизводной по времени 1ВЫХОДной координаты обуславливает поступлениеиа вход Иуль-органа 16 непрерывного сигнала одной полярности, который в свою очередь приводит к появлению на выходе цепи 10 дискретного сигнала. Воздействуя на усилитель с управляемым коэффициентом усиления 7 этот сигнал формирует коэффициент усиления, равный коэффициенту передачи .нелинейного блока.
При режиме в зонах «нечувствительности .
«мертвого хода, «насыщения выходная коорднната нелинейного блока не является линейной функцней входной координаты и ее форма не зависнт от формы -входной коордн.наты, а определяется нараметрами статической характерисБИки нелинейности. В этом случае ПроизБОДная выходной координаты становится разрывной функцией времени, фаза разрывов которой определяется характером входного сигнала и параметрами статической характеристики нелинейности. На интервалах разрыBOiB, на вход нуль-орга-на 16 поступает незначительный по уровню сигнал, не приводящий к срабатыванию схемы. Усилитель 7 в этом случае яе пропускает сигнал.
В случаях изменений 1параметрО|В статической характеристики Нелинейности лолучаются алгебраические приращения в интервалах времени работы схемы «а линейном и «елииейных участках, что приводит к изменению фазы разрывов лервой производной выходной координаты. Изменение фазы разрывав изменяет время существования или отсутствия управляемого сигнала на выходе еуль-органа 16, что автоматически приводит к коррекции работы усилителя с управляемым -коэффициентом усиления 7.
В случаях, когда нелинейности исследуемой системы однозначные, в схеме возможна устойчивая работа на линейном участке статической характеристики, что приводит к обязательному прохождению первой производной выходного сигнала нелинейного блока 8 через ноль.
Отрицательный эффект ложного срабатывания нуль-органа 16 в таких случаях компенсируется работой цепи 9, анализирующей входную координату нелинейного блока. Работа цепи 9 основана на линейной зависимости входной координаты и шыходной координаты нелинейного блока и их первых производных
в режиме на линейной части статической характеристики. Ввиду линейной зависимости, скорость и время прохождения через ноль первых производных будут одинаковыми для входной и выходной координат нелинейного блока.
При ложных срабатываниях нуль-органа 15, сигнал с нуль-органа 15 восстанавливает необходимый (Коэффициент передачи усилителя с управляемым коэффициентом усиления 7, воздействня на его второй управляющий вход.
Пред м е т и з о б р е т е н и я
Устройство для определения функций чувствительности нелинейных систем автоматического регулирования, содержащее генератор, подключенный входу модели системы, состоящей из последовательно включенных линейных звеньев и нелинейного блока, модель чувствительности системы, содержащую последовательно включенные линейные звенья и усилитель ic управляемым коэффициентом усиления, причем вход каждого линейного звена
модели системы подключен через вычислительный блок к выходу соответствующего звена модели чувствительности системы, отличающееся тем, что, с целью получения функции чувствительности систем автоматического регулирования с многозначными нестационарными, несимметричными нелинейностями, в него введены две цени, каждая из которых содержит последовательно соеди ненные дифференцирующее звено, блок определения модуля и нуль-орган, входы первой и .второй цени нодключены, соответственно, IKO входу и выходу нелинейного блока модели системы, а выходы - к первому и второму управляющему входу усилителя с управляемым коэффициентом усиления.
Г
1 2 i

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения функций чувствительности нелинейных систем автоматического регулирования | 1973 |
|
SU485421A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2288441C1 |
| Устройство для определения статической характеристики нелинейности типа"насыщение" | 1973 |
|
SU470794A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| СЛЕДЯЩАЯ СИСТЕМА С НЕЛИНЕЙНОЙ КОРРЕКЦИЕЙ | 1971 |
|
SU318907A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
1Ьл1Й7«г:гг;,т
L-
