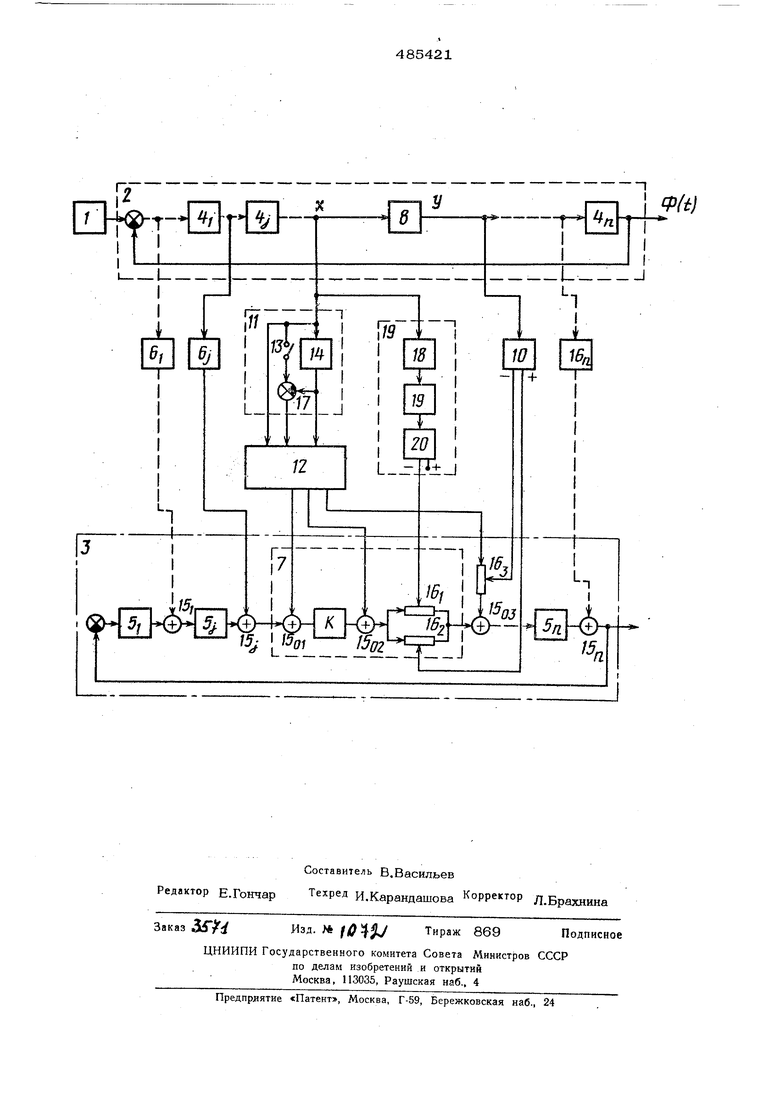
дополнительных сумматора, два из которых включены соответственно до линейной част и после линейной части усилителя с управляемым коэффициентом усиления и соедине с двумя выходами трехлозиционного сдвое ного коммутатора соответственно, третий выход которого через управляемый ключ подключен к входу третьего сумматора, который другим входом соединен с выходом усилителя с управляемым коэффициентом усиления, причем управляющий вход ключа подсоединен к инверсному выходунуль-органа цепи управления, подключенно к выходу нелинейного блока. Такое построение устройства позволяет расширить возможность существующего ра щения относительно полного исследования ВЛИЯНИЙ всех параметров на качество систем автоматического регулирования. На чертеже приведена блок-схема устройства. Устройство содержит генератор 1, модель системы 2, модель чувствительности .системы 3, линейные звенья вычислигельные блоки Jf, , bbi4ML;jiM4ejibrtbJti идили и -и , уси- литель 7 с управляемым коэффициентом усиления, блок нелинейности 8, цени упра ления 9 и 10, нелинейную цепь 11, трехпозиционный сдвоенный коммутатор 12, однопозишшнный коммутатор 13, поляризованное реле 14, сумматоры 15.-15fj 1 R1 R и it)-, , управляемые ключи 03 16, схему вычитания 17, Каждая из цепей управления 9 и 10 состоит из дифференцирующего звена 18, блока определе ния модуля 19 и 1гуль-органа 20, ; Устройство работает следующим образом, В режиме на линейной части статической характеристики выходная координата нелинейного блока является линейной функ цией входной координаты. В этом случае нелинейный элемент не вносит никаких искажений в форму выходного сигнала, кроме фазовых. Наличие первой производн . по времени выходной координаты нелинейного блока приводит к появлению на прямом выходе цепи управления 10 дискретного сигнала. Воздействуя на усилитель 7 с управляемым коэффициентом усиления (управляемый ключ 16 ), этот сигнал формирует коэффициент усиления, равный коэффициенту передачи нелинейного блока. При режиме в зонах нечувствительности , мертвого хода, насьпцения выходная координата нелинейного блока не является линейной функцией входной координаты и ее форма не зависит от формы | .входной координаты, а определяется пара- метрами статической характеристики нелинейности. В этом случае производная выходной координаты становится разрывной функцией времени, фаза разрьшов которой определяется характером входного сигнала и параметрами статической характеристики нелинейности. На интервалах разрывов, на инверсном выходе цепи управления 10 появляется дискретный сигнал, а на прямом выходе исчезает. Усилитель 7 в этом случае не пропускает сигнал, В случаях изменений параметров статической характеристики нелинейности (за исключением коэффициента усиления линейной части), получаются алгебраические приращения в интервалах времени работы схемы на линейном и нелинейных участках, что приводит к изменению фазы разрывов первой производной выходной координаты нелинейного блока. Изменение фазы разрывов изменяет время существования или отсутствия. управ1шющего сигнала на прямом или инверсном выходах цепи управления 10, что автоматически приводит к коррекции работы усилителя с управляемым коэффициентом усиления 7, В случаях, когда нелинейности исследуе- мой системы однозначны, в схеме возможна устойчивая работа на линейном участке статической характеристики, что приводит к обязательному пррхождению первой производной выходного сигнала нелинейного блока 8 через ноль. Отрицательный Ьффект ложного срабатывания цепи управления 10 в таких случаях компенсируется работой цепи управления 9, анализирующей входную координату нелинейного .блока на разрывность. Работа цепи управления 9 основана на линейной зависимости входной координаты и выходной координаты нелинейного блока и их первых производных в режиме на ли- нейной части статической характеристики, i Ввиду линейной зависимости, скорость и время прохождения через ноль первых производный будут одинаковыми для входной и выходной координат нелинейного блока. Таким образом, при ложных срабатываниях цепи управления 10, сигнал с инверсного выхода цепи управления 9 восстанавливает необходимый коэффициент передачи усилителя 7 с управляемым коэффициентом усиления, воздействуя на его второй управляющий вход (ключ 16 ). В с.лучаях, когда необходимо получить функции чувствительности выхода системы относительно собственных параметров не-
линейностей типа насыщение, и зоны нечувствительности , вычислительные блоки 6 - 6 отключаются, и к модели чувствительности 3 подключается при помощи трехпозиционного коммутатора нелинейная цепь 11. При ЭТОМ- для получения функций чувствительности выхода системы относительно коэффициента усиления линейной части статической .характеристики нелинейности типа насыщения необходимо при помощи трехпозиционного сдвоенного ком - мутатора 12 подключить вход нелинейного блока 8 к входу сумматора 15,-., а для
получения функций чувствительности выход
относительно уровня насыщения той же нелинейности выход поляризованного реле нелинейной цепи 11 подключается к - входу управляемого ключа 16 .
о
в тех случаях, когда необходимо получить функции чувствитэльности выхода системы относительно коэ4)фициента усиления статической характеристики нелинейности типа зоны нечувствительности, необходимо замкнуть одиопозиционный коммутатор 13 и выход схемы вычитания 17 нелинейной цепи 11 подключить к сумматору 15 „, а для получения функций чувствительности относительно величины зоны нечувствите; ьности нелинейной характеристики выход схемы вычитания 17 нелинейной цепи 11 нри разомкнутом одиопозиционном коммутаторе 13 нодключается ко входу сумматора 15 ,
Предмет изобретения
Устройство для опреде71ения фу}1кций чувствительности нелинейных систем автоматического регулирования, содержащее генератор, подключенный ко входу модели
системы, состоящей из последовательно | включенных линейных звеньев и нелинейного блока, модельчувствительности системы, состоящую из последовательно включенных через сумматоры линейных звеньев и усилителя с управляемым коэффициентом усиления, причем вход каждого ли}{ейного звена модели системы подключен через вычислительные блоки к входу соответствую-
щего сумматора модели чувствительности, вход и выход нелинейного блока подключены через цепи управления, каждая из которых состоит из последовательно включе} ных дифференцирующего звена, блока определения модуля и нуль-органа, к первому и
второму управляющему входу усилителя с | управляемым коэффициентом усиления, i отли чающееся тем, что, с целью расщирения области применения, оно
содержит схему вычитания, однопозиционный коммутатор, поляризованное реле, выходы которых подсоединены к схеме вычитания, а входы соединены с входом нелинейного блока, трехиозиционный сдвоенный
коммутатор, который тремя входами соответственно связа) с входом нелинейного блока, выходом схемы выштания и поляризованным реле, управляемый ключ и т|)И , дополнительных сумматора, два из которых
включены соответственно до ; инейной части и после линейной части усилителя с управляемым коэ(Н))1НИ511Том усиления и со единены с двумя выходакш трехнозицио П1Ого сдвоенного коммутатора соответственно,
третий выход которого через управляемый ключ подключен ко входу третьет-о сумматора, который друтим входом соединен с выходом усилителя с управляемым коэффициентом усиления, причем управляющий вход
ключа подсоединен к инверсному выходу нуль-органа цепи управления, подключенной к выходу нелинейного блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения статической характеристики нелинейности типа"насыщение" | 1973 |
|
SU470794A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ФУНКЦИЙ | 1973 |
|
SU404057A1 |
| СПОСОБ ФАЗОВОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ИСПОЛНИТЕЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2003 |
|
RU2246172C1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| Источник калиброванных напряжений | 1986 |
|
SU1345179A1 |
| Нелинейное корректирующее устройство для систем автоматического управления | 1978 |
|
SU752219A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ГИРОСТАБИЛИЗАТОРОМ | 2008 |
|
RU2381451C1 |
| Устройство для точного останова электропривода | 1985 |
|
SU1272447A1 |
| Формирователь сигналов с линейной частотной модуляцией | 1990 |
|
SU1826119A1 |
| САМОНАСТРАИВАЮЩЕЕСЯ УСТРОЙСТВО | 1969 |
|
SU240816A1 |