1
Известен электромеханический привод поступательного перемещения, содержащий вибратор осевых перемещений, например магнитострикционный, и узел управления, включающий две установленные па винте с осевым зазором полугайки, одна из которых соединена с вибратором, и механизм взаимного поворота полугаек с упругим элементом, связывающим одну полугайку с другой. В таком .приводе поворот одной полугайки осуществляется шаговым двигателем, а другой - связывающим упругим элементом.
Цель изобретения - упрощение привода.
Для этого механизма взаимного поворота выполнен в виде биметаллических пластин, обладающих магнитострикцией разного знака, размещенных внутри катущек управления и одновременно выполняющих функцию упругого элемента, связывающего полугайки.
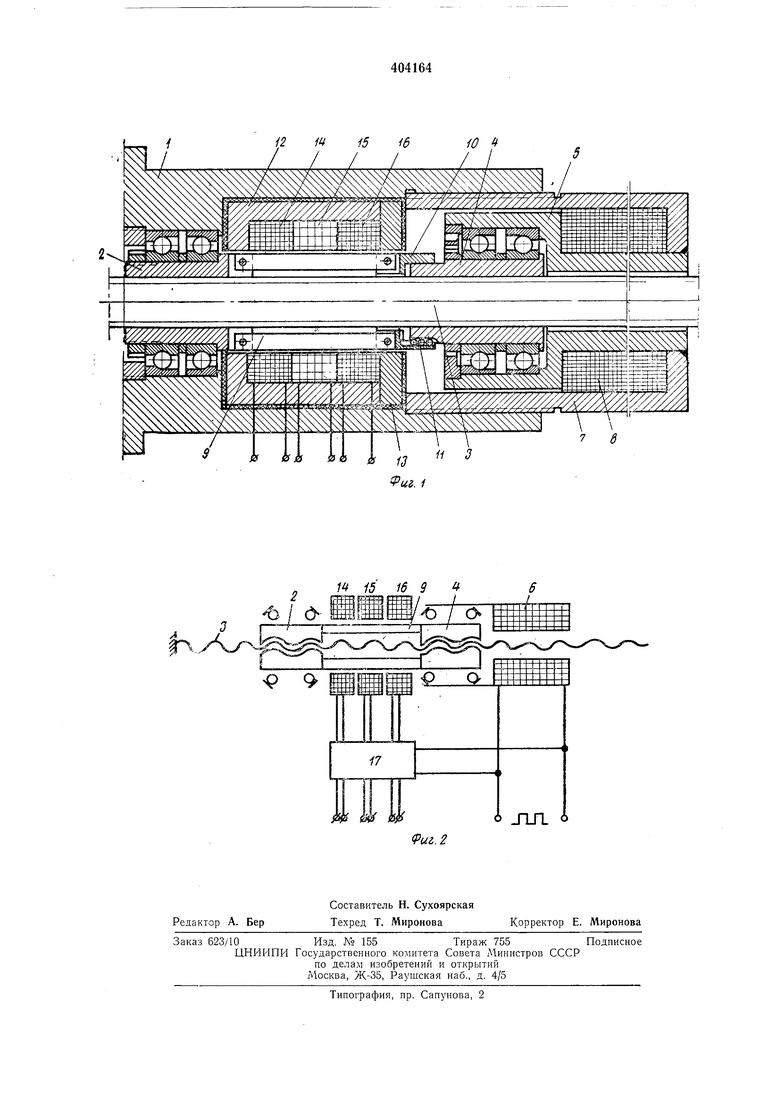
На фиг. 1 изображен электромеханический привод, продольный разрез; на фиг. 2 - кинематическая схема привода.
В корпусе 1 установлена в нодщипниках качения полугайка 2, сопряженная с винтом 3, с которым связана полугайка 4, установленная в подшипниках стакана 5 магпитострикционного вибратора 6, состоящего из стаканов 5, 7, выполненных из магнитострикционных материалов противоположных знаков, и катушки 8. Полугайки связаны магнитострикционными биметаллическими пластинами 9, втулкой 10 и шариковой шпонкой И. Биметаллические пластины 9 образуют замкнутую цепь с магнитопроводом 12, изолированным от корпуса 1 прокладкой 13.
Внутри магнитопровода 12 расположены управляющие катущкн 14-16, включенные через синхронизатор 17, связанный с катущкой 8
вибратора 6.
Катущка 8 вибратора 6 питается пульсирующим током с частотой, определяемой заданной частотой перемещений с помощью генератора или преобразователя.
Амплитуда вибраций превышает величину
максимального перемещения за один импульс.
В начальный момент,винт 3 опирается на
полугайку 4. При включении управляющей катущки биметаллические пластины 9 под действием магнитного поля изгибаются, поворачивая полугайку 2 в пределах зазора в паре 3-2 на угол, зависян1ИЙ от напряженности магнитного поля и, следовательно, от напряжения, питающего управляющую катушку. В
это время подается напряжение на катушку 8 вибратора 6 и полугайка 4 перемещается в направлении, противоположном направлению рабочего перемещения. Винт 3 перемещается при этом до соприкосновения витков его резьбы с витками резьбы полугайки 2.
Таким образом, при включе 1ии вибратора выбирается зазор в паре 2-3 и образуется зазор Б паре 4-3.
Сиихронизатор прекращает иодачу напряжеиия на управляющие катущки и пластины 9 выпрямляются, возвращаясь в исходное ноложеиие и проворачивая при этом полугайку 4 iB пределах зазора в паре 4-3.
После прекращения подачи тока на катушку 8 вибратора 6 магнитострикциоппые стаканы 5, 7 возвращаются в исходное состояние, перемещая полугайку 4 и винт 3 в направлении рабочих перемещений. При этом вновь образуется зазор в паре 2-3.
Система вернулась в исходное положение и после включения управляющих катущек цикл повторяется.
Величина перемещений винта за один цикл определяется углом поворота лолугаек и, следовательно, величиной иапряжения, питающего управляющую катушку.
Согласованность подачи импульсов на катушку вибратора и включение- управляющей катуЩ|Ки обеспечивается с помощью синхронизатора 17, управляемого имлульсами, поступающими на вибратор 6.
Лри изменении последовательности подачи импульсов па вибратор и включения катущек управления изменяется направление рабочих перемещений винта.
Взаимный проворот полугаек производится при отсутствии на одной из них пагрузки, поэтому мощность управляющего сигнала может быть невелика.
Силовым приводом является вибратор 6, перемещающий винт 3 с рабочим органом.
Установка нескольких управляющих катущек 14-16, подключенных к отдельным командоаппаратам, подающим на катушки ток. зависящий, например, от заданной величины перемещения и от величины необходимой .коррекции, позволяет упростить конструкцию привода и повысить точность и надежность его работы.
При протекании через катущки различных токов магнитные поля, создаваемые ими, складываются или вычитаются в зависимости от
полярности включения катущек и полярности управляющих сигналов.
Полярность включения катушек с учетом полярности сигналов выбирается такой, чтобы обеспечить заданное, положительное или отрицательное влияние данного сигнала на величину перемещения.
Предлагаемый электромеханический привод с усилением мощности дискретных перемещений 1может быть использован в системах автоматического управления мащин и механизмов.
Предмет изобретения
Электромеханический привод поступательного перемещения, содержащий вибратор осевых перемещений, например магнитострикционный, и узел управления, включающий две установленные на винте с осевым зазором полугайки, одна из которых соединена с вибратором, и механизм взаимного поворота полугаек с упругим элементом, связывающим полугайки друг с другом, отличающийся тем, что, с целью упрощения привода, механизм взаимного поворота выполнен в виде биметаллических пластин, обладающих магнитострикцией разного знака, размещенных внутри катушек управления и одновременно выполняющих функцию упругого элемента, связывающего полугайки.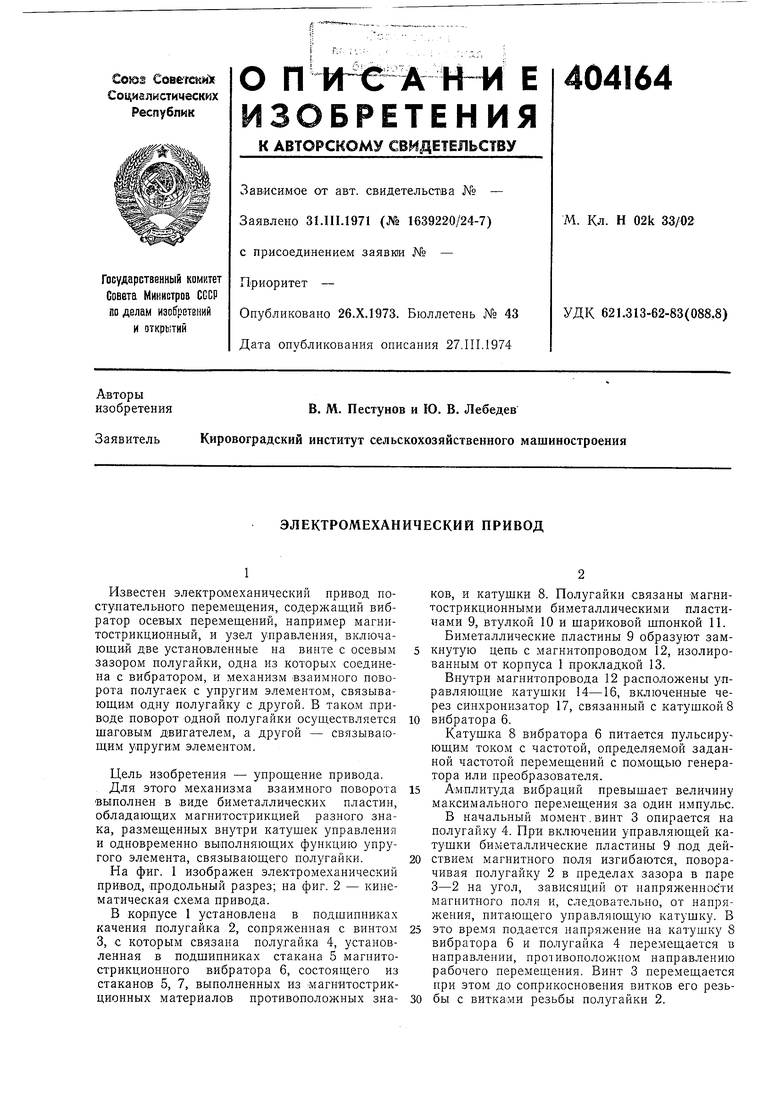
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГОВЫЙ ПРИВОД ПОДАЧИ | 1973 |
|
SU400437A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ЭЛАСТИЧНЫЙ ВИНТОВОЙ МЕХАНИЗМ | 1995 |
|
RU2140591C1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРАТОР | 1965 |
|
SU168031A1 |
| ГАЙКА ШАРИКОВОЙ ВИНТОВОЙ ПЕРЕДАЧИ | 2007 |
|
RU2362926C2 |
| Устройство для крепления штучного груза на транспортном средстве | 1988 |
|
SU1595712A1 |
| Магнитострикционный привод линейных перемещений | 1980 |
|
SU889978A1 |
| Устройство для поштучной выдачи плоских заготовок | 1987 |
|
SU1426681A1 |
| Маточная гайка токарно-винторезногоСТАНКА | 1979 |
|
SU804216A1 |
| Устройство для маркировки электрических проводов | 1986 |
|
SU1403100A2 |
| ХОДОВАЯ ГАЙКА | 1969 |
|
SU254964A1 |