1
Изоб|ретение касается приводов подаЧ металлорежущих станков.
Известны шаговые приводы станков с ЧПУ, включающие шаговый двигатель, кинематически связанный с гайкой ходового винта, состоящей из двух .половин.
Предлагаемый привод отличается от известных тем, что одна из половин гаек, кинематически связанная с двигателем, установлена на ходовом винте с осевым зазором, соединена с вибрато|ром осевых колебаний и подпружинена относительно второй половины.
Это упрощает конструкцию привода.
Кроме того, для упрощения эксплуатации привода вибрат01р осевых колебаний выполнен магнитострикционным, а система питания его включена синхронно щаговому двигателю.
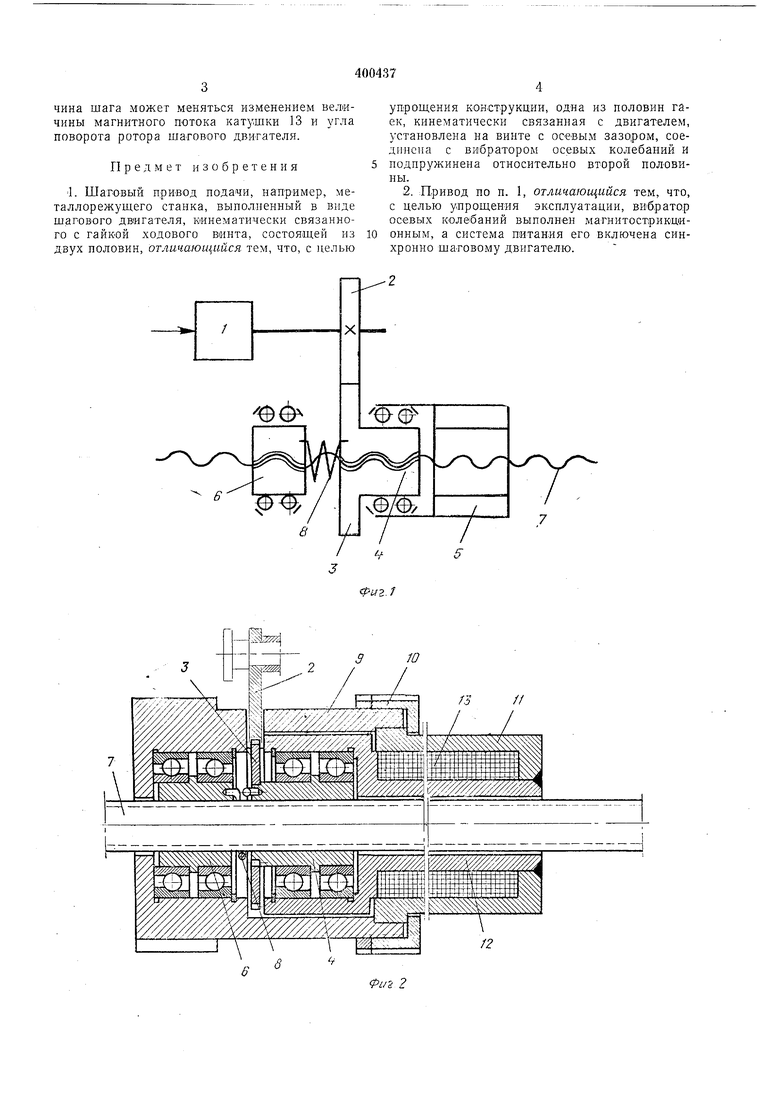
На фиг. 1 приведена кинематическая схема предлагаемого привода; на фиг. 2 - то же, продольный разрез.
Привод содержит шаговый двигатель 1, связанный че1рез зубчатые колеса 2 и 3 с полугайкой 4, вибратор 5 осевых колебаний, полугайку 6, самотормозящийся винт 7, пружину 8. Вибратор 5 закреплен на KOipnyce 9 гайкой 10. Вибратор выполнен из втулок 11 и 12, выполненных из материала, обладающего марнитострикционным свойством разного знака, между втулками установлена катушка 13. Полугайка 4 установлена на винте с осевым
зазором, превышающим амплитуду осевых колебаний вибратора.
Включается шаговый двигатель и поворачивает полугайку 4 в пределах зазора. При этом закручивается 8, которая поворачивает полугай ку 6 в том же направлении в момент включения катушки вибратора и осевого перемещения полугайки 4 с винтом. Полугайка б в момент проворота разгружена от осевой нагрузки полугайкой 4.
Выключение катушки 13 вызывает обратное осевое смещение полугайки 4, которая при этом разгружается. Технологическую напрузку винта воспринимает в это время полугайка 6.
Шаговый двигатель сообщает очередной импульсный проворот полугайке 4, поворачивая ее в пределах зазора в том же направлеНИИ.
Последующее включение катущки 13 вызывает перемещение полугайки 4 и винта 7 в направлении подачи, разгрузку полугайки б и т. д.
Шаговые перемещения повторяются с частотой включения катущкн 13 и щагового двигателя 1, работающих синхронно. Реверс привода осуществляется изменением направления вращения шагового двигателя. Величина шага может меняться изменением величины магнитного потока катушки 13 и угла поворота ротора шагового двигателя.
Предмет изобретения
1. Шаговый привод подачи, например, металлорежушего станка, выполненный в виде шагового двигателя, кинематически связанного с гайкой ходового винта, состоящей из двух половин, отличающийся тем, что, с целью
упрош,ения конструкции, одна из половин гаек, кинематически связанная с двигателем, установлена на винте с ос-евым зазором, соединена с Bi-гбратором осевых колебаний и
подпружинена относительно второй половины.
2. .Привод по п. 1, отличающийся тем, что, с целью упрощения эксплуатации, вибратор осевых колебаний выполнен магнитост1рикционным, а система питания его включена синхронно шаговому двигателю.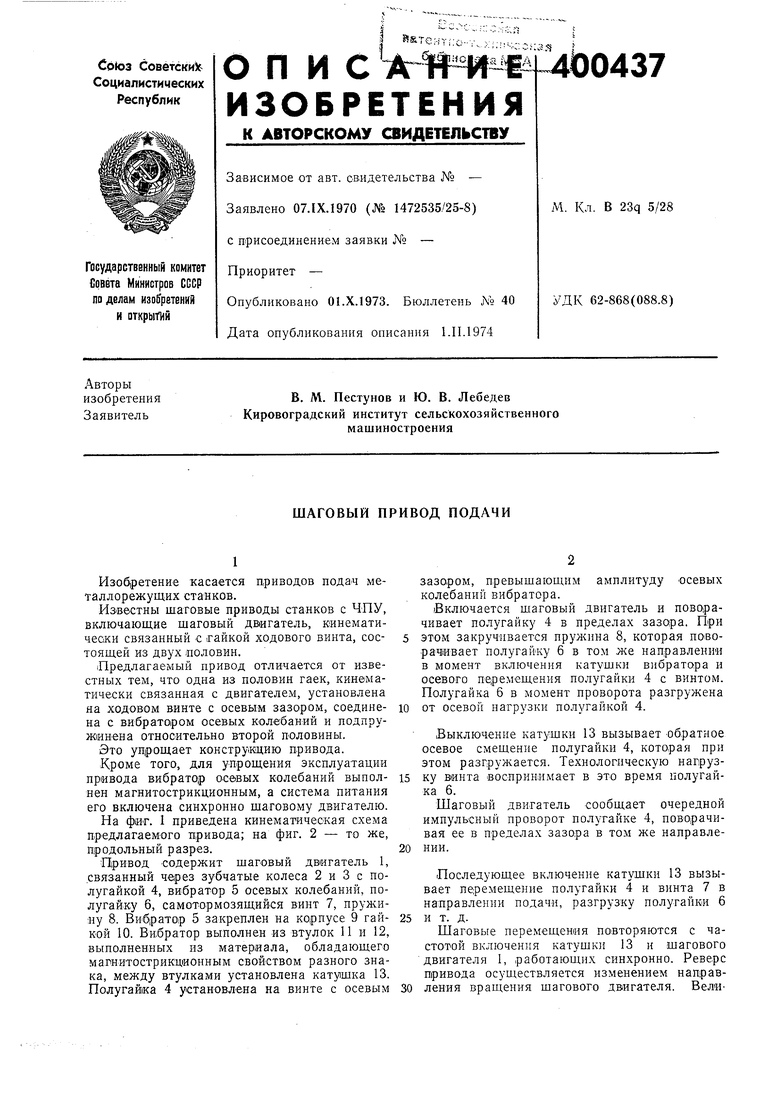
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 1973 |
|
SU404164A1 |
| Устройство для вырубки заготовок из полосы особопластичных металлов | 1984 |
|
SU1266608A1 |
| ПРИВОД ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 1972 |
|
SU360193A1 |
| Привод подачи металлорежущего станка | 1984 |
|
SU1281792A1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВИНТ - ГАЙКА С ДЛИННЫМИ РЕЗЬБОВЫМИ РОЛИКАМИ | 2004 |
|
RU2292502C2 |
| Устройство для автоматического выключения подач суппорта токарно-винторезного станка | 1980 |
|
SU1060416A1 |
| Автомат для изготовления электрических катушек | 1977 |
|
SU728175A1 |
| Схват | 1982 |
|
SU1060469A1 |
| Привод перемещения стола плоскошлифовального станка для глубинного шлифования | 1983 |
|
SU1155433A1 |
| ХОДОВАЯ ГАЙКА | 1969 |
|
SU254964A1 |
Ч-Х-ХУ
/
/
5
