1
Изобретеиие относится к техиике производства Г1олуировод 1нковых нрнборов и может быть иснользовано для автоматического монтажа бескорнусиых приборов с жесткими выводами к подложкам микросхем.
Известны устройства для траиснортироваиия подложек от одной позиции к другой, примепяемые в миогоиозицпонных установках для ирисоедииеиия иолупроводииковых кристаллов к подложкам, в которых иа каждой позиции присоединяется один кристалл па оиределенное место подложки заодии рабочий цикл.
Эти устройства для траиснортироваиия выполнены в виде поворотного миогопозициоииого стола или ленточного транспортера, иесуи1его сборочные нриснособленпя.
Недостатком известных устройств является жесткое базироваиие иодложек отиосптельно трансиортируюп;его устройства, иеремеи1.ающего их от одиой иозиции к другой, которое обусловлеио тем,что сборочные приспособлеиия закреплены пеподвижио, а подложка зажимается п базируется по боковым граням. Поэтому для достижеппя необходимой точпостн автоматического монтажа кристаллов требуется весьма высокая точность гйбаритиых размеров подложек, что усложняет тсхиологический процесс изготовления
подложек (в 11екото)ых случаях исобходпмая точпость вообп1,е не может быть достигнута). Целью изобретеиия является новьпненне точности базирования подложек. Эта цо.-п, достигается тем, что сборочные прпснособлсния свободно установлены иа устройстве для трансиортироваиия и нрижаты своими базовыми боковыми сторонами к трем эксцентрикам, два из которых, соединенных между собой тягой, контактируют с одной боковой стороной сборочного нрнснособления, а однн - с другой. Эксцентрики каждого сборочного приспособления тюиеременпо соедппяются муфтой сцеплепня с неподвпжно закреплеиiH iM мехапнзмом привода сборочиых прпспособлений.
Такая конструкция устройства для трапсиортнрования иодложек позволяет осуп1,ествлять базироваппе подложек по коптактиым плои1адкам иезависимо от точности выполпеппя базируюищх поверхпостей (боковых граней) подложки путем перемещения сборочных ирисиособлеиий па одиой пз поз1пи1Й. Па иоследуюпщх позициях базироваиие сохраняется, и этим обеспечивается точпост : автоматической сборки.
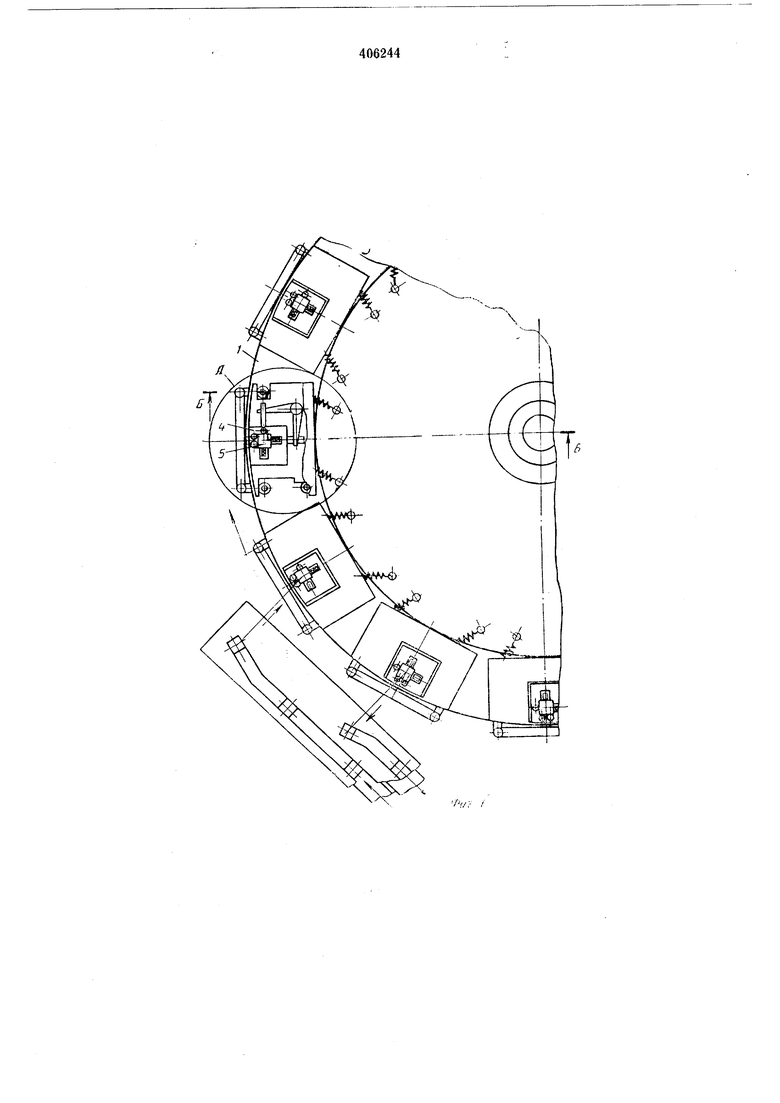
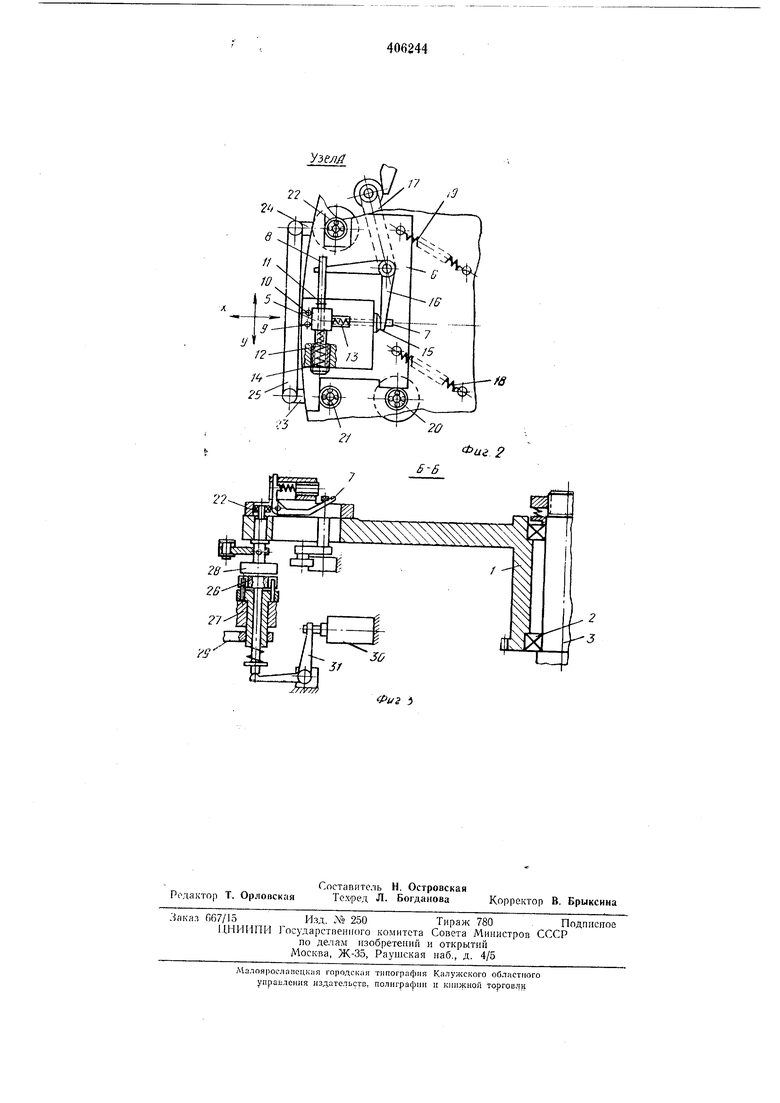
На фиг. 1 изображепо устройство для траиспортировапия подложек, впд в илапе; па фиг. 2 -узел /1; иа фпг. 3 -разрез но J3-j5 на фиг . 1.
ycrpofiCTiio л.1я транспортирования подложек . в ИНДС НОВОрОТНОГО МПОГОПОзиц1К) стола /.вращающегося в подшипниках 2 относительно неподвижной оси 3. ПоuopoTiibiii сто.т песет сборочные нрнспособлеНИИ 4, в которых закрепляются в заданном положении подложки 5. Число сборочных нрнспособ.чений равно числу позиций стола.
Сборочное приспособление представляет собой корпус 6, устаповлепный на рабочей поверхности ноноротного стола /. Качаюи геся рычаги 7 н 8 обеспечивают прпжим иодложки 5 к базовым упорам 9, 10 и //. Усилие прижима передается от пружин 12 и 13 II регулируется виитами 14 н /5. Рычаги 7 и 8 получают движеиие от рг шагов 16 и 17. Пружины 18 н 19 нрнжимают сборочные нрнспособлепия базовыми боковыми поверхностями к под1ииппикам -эксцеитриков 2(9, 2/и 22, установленных на поворотном столе. Эксцентрнкн 2/ и 22 связаны между собой рычага; 1и 23 и 24 и тягой 25 так, что оба вращаются CHHxpoinio, обсснечнвая неремсщенне сборочного присиособле1П1я ио коордипате X, эксцентрик 20, враи1,аясь, неремепдает сборочное нрнснособлепие по координате У. Эксцентрик 20 и 22 нрап1;аются от одииаковы.х приводов, закрепле1П1ых неподвижно на позиции, следуюн ей нен.осредственно за загрузочиой..
Прнвод СОСТ01ГГ пз пол у муфты 26, посажеппой в корпус 27. При перемегнегипт вверх пол муфта 26 ctioeA фрикциопиой илоской новерхпостыо сцепляется с полу муфтой 28 эксцентрнка 22. Полхмуфта 26 вран,ается от )ычага 25, связанного с приводом (иа чертеже не ноказап), а неремеп1,ается вверх от э.тектро.магиита 30 через рычаг 31.
Устройство для трапспортироваиия подложек работает следуюни-1м образом.
Па нозицнн загрузки нодложка 5 автооператором переносится из транспортера п сборочное нрнспособление и зажимается п не.м. Стол / поворачивается па шаг.
Па следуюп1ей позиции подложка базируется по ее топологии относительно неподвижной координатной сетки проектора (на чертежах не показано) неремещепием сборочпого приспособления 4 относительно поворотного стола. Для этого нсхчумуфты 28 вводятся в сцепление с иолумуфтами 26, которые передают вращение эксцентрикам 22 и 20. При вращении эксцентриков 2/, 22 сборочиое ириспособление неремеишется ло коордииате X, нри врапл,ении эксцеитрика 20-но координате У. При последуюИ1их поворотах стола па шаг подложка сохраняет свое ноложеиие, чем обеспечивается точность автоматической сборки. Готовая микросхема снимается автооператором и переиоситея па разгрузочный транспортер.
Предмет изобретения
Устройство для транспортирования подложек, содержащее поворотный мпогопозиционпый стол, несунщй сборочные приспособления, отличающееся тем, что, с целью иовып:епия точности базирования подложек, сборочные приспособления свободно установлены иа поворотном столе и прижаты своими боковыми базовыми сторонами к трем эксце1ггрикам, два из которых, соедипенных между собой тя1ой, ко}Г1актируют с одной боковой стороной сборочного приспособления, а третнй - с другой, причем эксцентрики каждого сборочного приспособления попеременпо связаиы муфтами сцепления с иеиодвижно закрепленны.м механизмом привода сборочных приспособлений.
УЭ(У7
i
22
,3
Фи 2
Б-Б
Фиг 3
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ПРИСОЕДИНЕНИЯ ПОЛУПРОВОДНИКОВЫХ КРИСТАЛЛОВ К ПОДЛОЖКАМ МИКРОСХЕМ | 1971 |
|
SU303678A1 |
| УСТРОЙСТВО ДЛЯ СБОРКИ ПОКРЫШЕК | 1971 |
|
SU303207A1 |
| Автоматическая поточная линия дляСбОРКи НАРучНыХ чАСОВ | 1976 |
|
SU798685A1 |
| Установка для сборки и автоматической сварки круговых стыков | 1986 |
|
SU1397229A1 |
| АВТООПЕРАТОР ДЛЯ ПОДАЧИ ДЕТАЛЕЙвс1:сою^нАЯI! -TlJTUn "rvrf"""''iSJf •!'"hHitiiinJ-iiAsifni:^ Ьп: БИБЛИОТЕКА | 1973 |
|
SU366060A1 |
| Установка для сборки и сварки изделий | 1980 |
|
SU872154A1 |
| МОТАЛЬНЫЙ МЕХАНИЗМ ДЛЯ ПРЯДИЛЬНЫХ и КОЛЬЦЕКРУТИЛЬНЫХ МАШИН | 1965 |
|
SU177306A1 |
| Устройство для нанесения паст на подложки | 1972 |
|
SU445180A1 |
| Устройство для прессования из акрилата изделий, например пуговиц и т.п. | 1957 |
|
SU129812A1 |
| Агрегатный станок | 1986 |
|
SU1423348A1 |