1
Изобретение относится к пневматическим задатчикам, которые могут быть использованы в системах централизованного контроля и управления регуляторами. Управление регуляторами осуществляется централизованно с центральной зоны управления и децентрализованно (местное управление) - при пуске и остановке процесса.
Известно пневматическое устройство управления, содержащее блок дистанционного управления, блок задатчиков, выходы которых подключены к выходам устройства и входам коммутатора, выход которого соединен с блоком индикации, а входы - с адресными каналами задатчика.
Недостатками известного устройства являются его невысокая надежность в системе управления регуляторами в напряженных режимах ведения процесса (пуск, останов) вследствие отсутствия двойного управления, малого быстродействия, наличия апериодического звена в центральной части и наличия блоков активной памяти, которые усложняют и ухудшают работу задатчика.
Предложенное устройство содержит реверсивный двигатель, входы которого подключены к выходам блока дистанционного управления, размещенный на одном валу с реверсивным двигателем блок кинематических передач по числу задатчиков и соединенный с ним блок муфт сцепления, подключенный ко входам блока задатчиков, приче.м управляющие входы блока муфт сцепления соединены с адресными каналами задатчика.
Это повышает надежность и быстродействие устройства.
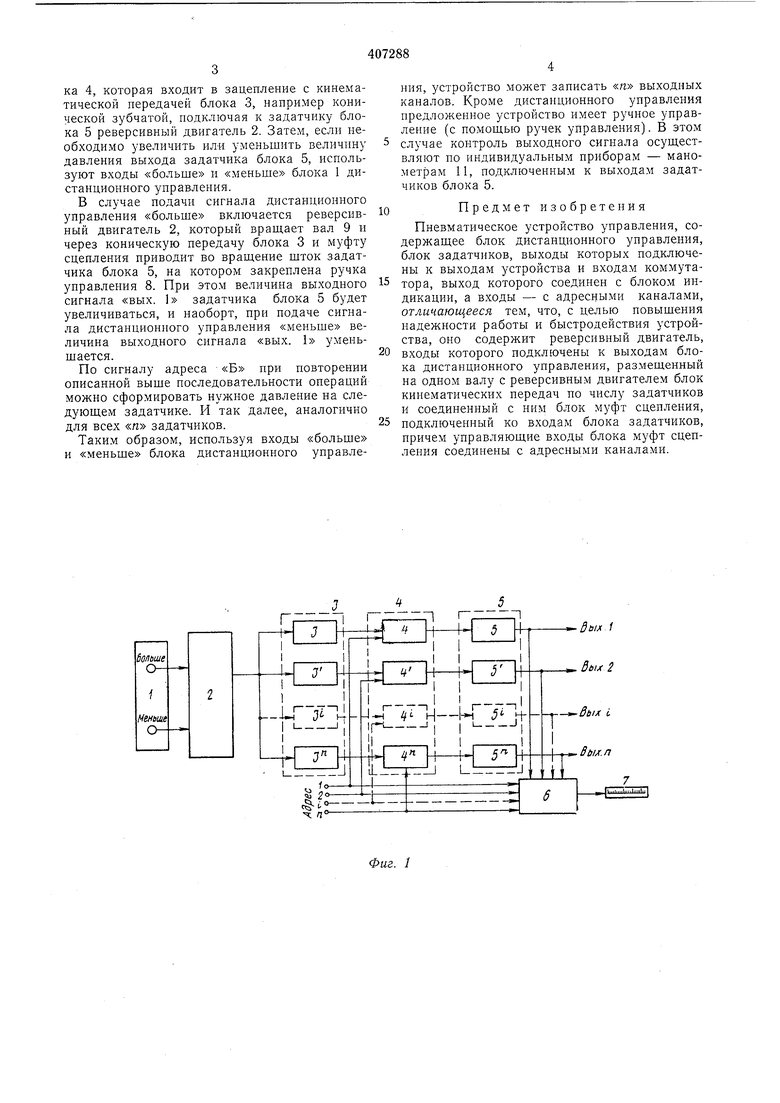
На фиг. 1 изображена блок-схема предлагаемого пневматического устройства, которое содержит блок 1 дистанционного управления, имеющий два входа («больще и «меньще), реверсивный двигатель 2, блок 3 кинематических передач, блок 4 муфт сцепления, блок 5 задатчиков, коммутатор 6, блок индикации 7.
На фиг. 2 изображена принципиальная схема устройства, поясняющая работу, где: 8 и 8 - ручки управления задатчиками блока 5; 9 - вал реверсивного двигателя 2; 10 - пневмоклапан коммутатора 6; II и 11 - манометры.
Устройство работает следующим образом.
По сигналу в канале адреса, например адрес «А, пневмоклапан 10 коммутатора 6 осуществляет операцию коммутации, т. е. подключает вызванную точку на блок индикации 7.
Одновременно сигнал адреса «А поступает в управляющую камеру муфты сцепления блока 4, которая входит в зацепление с кинематической передачей блока 3, например конической зубчатой, подключая к задатчику блока 5 реверсивный двигатель 2. Затем, если необходимо увеличить или уменьшить величину давления выхода задатчика блока 5, используют входы «больше и «меньше блока 1 дистанционного управления.
В случае подачи сигнала дистанционного управления «больше включается реверсивный двигатель 2, который вращает вал 9 и через коническую передачу блока 3 и муфту сцепления приводит во вращение шток задатчика блока 5, на котором закреплена ручка управления 8. При этом величина выходного сигнала «вых. 1 задатчика блока 5 будет увеличиваться, и иаоборт, при подаче сигнала дистаиционного управления «меньше величина выходного сигнала «вых. 1 уменьшается.
По сигналу адреса «Б при повторении описанной выше последовательности операций можно сформировать нужное давление на следующем задатчике. И так далее, аналогично для всех «тг задатчиков.
Таким образом, используя входы «больше и «меньше блока дистанционного управления, устройство может записать «п выходных каналов. Кроме дистаиционного управления предложенное устройство имеет ручное управление (с помошью ручек управления). В этом 5 случае контроль выходного сигнала осуществляют по индивидуальным приборам - манометрам 11, подключенным к выходам задатчиков блока 5.
0Предмет изобретения
Пневматическое устройство управления, содержащее блок дистаиционного управления, блок задатчиков, выходы которых подключены к выходам устройства и входам коммутатора, выход которого соединен с блоком индикации, а входы - с адресными каналами, отличающееся тем, что, с целью повышения надежности работы и быстродействия устройства, оно содержит реверсивный двигатель, входы которого подключены к выходам блока дистанционного управления, размещенный на одном валу с реверсивным двигателем блок кинематических передач по числу задатчиков и соединенный с ним блок муфт сцепления,
подключенный ко входам блока задатчиков, причем управляющие входы блока муфт сцепления соединены с адресными каналами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическое устройство централизованного управления | 1983 |
|
SU1136113A1 |
| Пневматическое устройство для многоканального управления | 1972 |
|
SU447686A1 |
| Устройство для управления пневматическими задатчиками в системах регулирования и контроля технологических объектов | 1980 |
|
SU868705A1 |
| ТИЧЕСКИЙ ГРУППОВОЙ ЗАДАТЧИК | 1969 |
|
SU240339A1 |
| Устройство управления объектами | 1979 |
|
SU873246A1 |
| Устройство для связи управляющего вычислительного комплекса с пневматическими регуляторами | 1983 |
|
SU1163330A1 |
| Устройство для контроля систем преобразователей информации | 1980 |
|
SU978152A1 |
| ФОТОМЕТРИЧЕСКИЙ АНАЛИЗАТОР | 1969 |
|
SU252662A1 |
| ПНЕВМАТИЧЕСКАЯ СИСТЕМА ДИСТАНЦИОННОГО | 1969 |
|
SU254355A1 |
| Пневмоэлектронная система централизованного контроля и управления | 1986 |
|
SU1363135A1 |

Фиг. 1
Выл. 2
Рпит (i) fVcr
