Изобретение относится к области аналоговых средств вычислительной техники, предназначенных для моделирования динамических нроцессов промышленных объектов горнорудной (добывающей) промышленности (марганцевые рудники, шахты, магистральные ленточные конвейеры и т. д.) и транспорта (пассажирские подвесные канатные дороги).
Известно устройство для исследования динамики каната горных машин, необходимость применения которого вызвана сложностью и громоздкостью как аналитического, так и номографического методов расчета динамических характеристик систем с распределенными параметрами, которые описываются математически дифференциальными уравнениями в частных производных с граничными условиями, выражаемыми обыкновенными линейными н нелинейными дифференциальными уравнениями, аналитическое решение которых, как нравило, не может быть дано в удобной и компактной для обозрения и анализа форме, вследствие чего приходится вести исследование этих систем на электронных моделирующих установках.
Исследование хчина.мических процессов в шахтных подъемных и подвесных канатах, равно как и в подпрулсиненных редукторах .многоканатных подъемных машин, магистральных ленточных конвейерах н т. д. представляет собой достаточно трудоемкую задачу даже при использовании электронных моделирующих установок, так как момент, развиваемый асинхронным двигателем на валу при контакторном пуске, является нелинейной функцией скорости вращения двигателя и величины сопротивления роторного реостата, которое при контакторном пуске измепяется мгновенно, вследствие чего момент, развиваемый двигателем, является разрывной функцией. Но как известно, при наличии в дифференциальных уравнениях разрывных функций, число решений, которое необходиМО выполнить, решая эти уравнения на серийно выпускаемых промышленностью электронно-моделирующих установках, равно числу разрывов функций. Отсутствие же непрерывности процесса рещения на аналоговой
вычислительной машине и большое число решений, равное числу механических характеристик, ие дает наглядности процесса изменения во времени искомых переменных, что в значительной степени удлиняет и усложняет
как непосредственно сами исследования при проектировании, так и интерпретацию получаемых результатов, что безусловно является недостатком, так как, в конечном счете, замедляет темпы технического прогресса в указанной области.
Целью изобретения является значительное сокращение времени, необходимого для исследований н для производства расчетов сравнительно с обычными аналитическими, графоаналитическими и номографическими методами, обеспечивание оитимальиого темна исследования и визуального наблюдения за изменениями переменных, при осциллографировании результатов решения, характеризующих динамику объекта, при вариации начальных условий и параметров (геометрических, механических, электрических) исследуемой динамической системы, увеличеиие точности результатов расчета и обеспечивание минимальной трудоемкости исследований.
Эта иель достигается прпменением аналогового устройства, с помощью которого решаются аппроксимированные, предварительно подготовленные и приведеиные к машинному виду дифференциальиые уравнения, с коэффициентами при переменных, подобранными так, чтобы обеспечить минимум вариаций исследуемой-системы, без нарушения полноты исследований.
Аппроксимация дифференциальных уравнений в частных производных системой обыкновенных дифференциальных уравнений подлежит непосредственному исследованию и решению при помощи предложенного устройства. Задача может быть успешно решена при условиях: в зависимости от выбранного числа участков разбиеиия длины каната и комбииации параметров, оценки величины методической иогрешности, т. е. определения как частотных, так и амплитудных погрешностей.
Конструктивно предложенное устройство отличается тем, что оно содержит функциональные преобразователи, входы которых подключены к выходу блока управления, а выходы соединены с коммутатором, вычислительный блок, ко входам которого подключены соответственно коммутатор, блок задания начальных условий, блок задания параметров, блок периодизации, вход которого соединен с выходом вычислительного блока, а выход- с блоком управления.
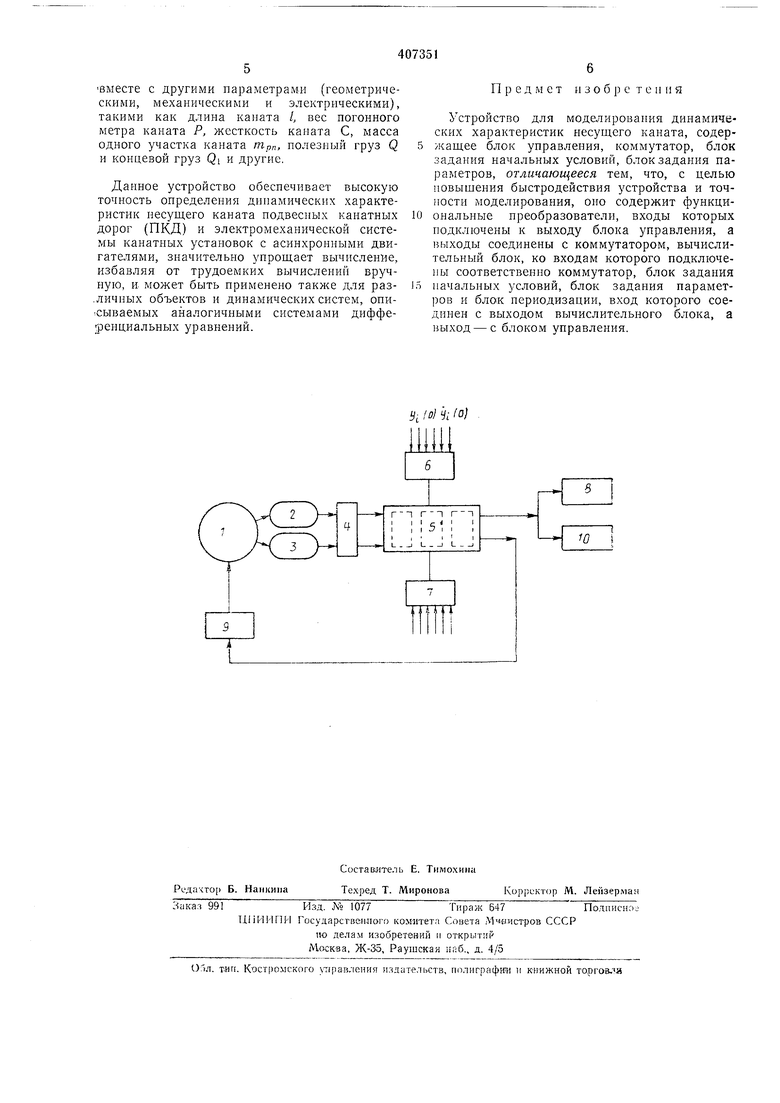
На чертеже, изображено иред тоже1пюе устройство, в состав которого входят следующие основные блоки: блок управлеиия У, служащий для осуществления операций последовательной выдачи характеристик; функциоиальиый преобразователь 2, служащий для реализации семейства электромеханических характеристик асиихроииого двигателя ири контакторном пуске; функциональный преобразователь 3, служащий для воспроизведения различиых законов (линейный, эксноненциальиый, ступенчатый и т. д.) измеиення вынуждающих воздействий на канат; коммутатор 4, построенный на поляризованных реле; вычислительный блок 5, блок 6 задания иачальиых условий, блок 7 задания параметров, блок 8 визуальной индикации за ходом изменения процесса решения (либо во времени, либо по его фазовому портрету), блок 9 периодизации решения, регистрирующий блок 10, служащий для фиксации процесса решения, т. е. для автоматической записи динамических характеристик исследуемой модели объекта.
При построеиии схемы предлагаемого устройства авторы исходили из числа участков разбиеиия всей задаииой длины каната на 8 отрезков, что вполне удовлетворяет требованиям инженерной практики. Именно это обстоятельство и определило количество интеграторов, использованных в схеме модели объекта.
В этом случае вычислительный блок содержит 14 интеграторов, служащих для решения системы обыкновенных дифференциальных уравнений, описывающих динамику объекта с заданиыми иачальными условиями, задаваемыми в блоке 6, выдающем сигиалы ф( (0) и ф; (0) (неремещения и скорости), (где i 0, 1, 2, 3, 4, 5, 6, 7), поступающие иа интеграторы в предпусковой период. В момент времени функциональные преобразователи 2 и 3 служат для реализации семейства характеристик асиихронного двигателя при его контакторном пуске (блок 1) и для имитации различных законов изменения вынуждающих воздействий во времени (блок 2).
Блок управления 1 служит для нодачи и сиятия сигналов, вырабатываемых на функциональных преобразователях 2 и .3 соответствеино и подаваемых через коммутатор 4 на входы интеграторов, входящнх в состав вычислительного блока 5, через определенные интервалы времени, задаваемые автоматически от блока нернодизации 9 (в ироцессе решения) иосле окончаиия каждого цикла решения, соответствующего определенной комбинации исследуемых иараметров объекта и иопым иачальным условиям, задаваемым блоком 6, а также различным законам изменения вынуждающих воздействий, поступаюН1ИХ с функционального преобразователя 3
на в.ход вычислительного блока 5.
Динамические характеристики моделируемого объекта с выхода вычислительного блока 5 поступают на блок 8 визуальной индикации (например, на осциллограф), и на регистрирующий блок W, предназначенный для заинси исследуемых процессов.
Диаграммой контакториого пуска асинхронного двигателя, воспроизводимой с номощьго функционального преобразователя 2, задается число иусковых характеристик, максимал1)ный момент двигателя в относительных единицах и верхний момент нереключения. Другие же характеристики, как например среднее нусковое усилие, развиваемое двигателем, номинальное усилие и другие, рассчитываются по известным формулам на стадии подготовки задачи для моделирования н вводятся в блок 7 задания параметров объекта
вместе с другими параметрами (геометрическими, механическими и электрическими), такими как длина каната /, вес погонного метра каната Р, жесткость каната С, масса одного участка каната /Пр„, полезный груз Q н концевой груз Qi и другие.
Данное устройство обеспечивает высокую точность определения динамических характеристик несущего каната подвесных канатных дорог (ПКД) и электромеханической системы канатных установок с асинхронными двигателями, значительно упрощает вычисление, избавляя от трудоемких вычислений вручную, и может быть применено также для раз.личных объектов и динамических систем, описываемых аналогичными системами дифференциальных уравнений.
П р е д м с т и 3 о б р е т е н и я
Устройство для моделирования динамических характеристик несущего каната, содержащее блок управления, коммутатор, блок задания начальных условий, блок задания параметров, отличающееся тем, что, с целью повышения быстродействия устройства и точности моделирования, оно содержит функциональные преобразователи, входы которых подключены к выходу блока управления, а выходы соединены с коммутатором, вычислительный блок, ко входам которого подключены соответственно коммутатор, блок задания начальных условий, блок задания параметров и блок периодизации, вход которого соединен с выходом вычислительного блока, а выход - с блоком управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Аналого-цифровое вычислительное устройство | 1988 |
|
SU1501103A1 |
| Аналого-цифровая вычислительная система | 1987 |
|
SU1429139A1 |
| Устройство для решения нелинейных уравнений теплопроводности | 1987 |
|
SU1453421A1 |
| Устройство для решения систем дифференциальных уравнений | 1977 |
|
SU674030A1 |
| Тренажер для обучения оператора энергетического объекта | 1983 |
|
SU1128286A1 |
| Устройство для моделирования линейных динамических систем | 1978 |
|
SU742974A1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2163387C1 |
| Устройство для моделирования статических и динамических характеристик привода координатно-шлифовального станка | 1983 |
|
SU1113817A1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2160927C1 |
| МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПРОВЕРКИ СИСТЕМЫ УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432592C1 |
