Изобретение относится к вычислительной технике и может быть использовано для моделирования непрерывно- дискретных процессов и систем управ- ления в реальном и ускоренном масштабах времени.
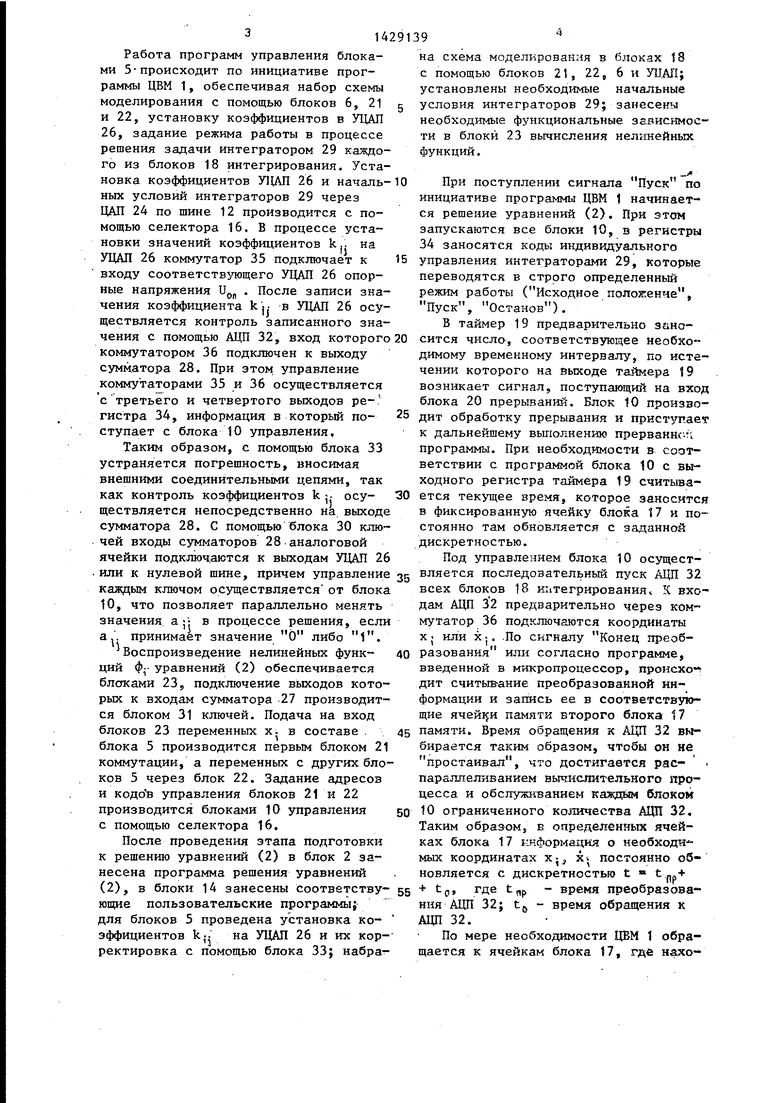
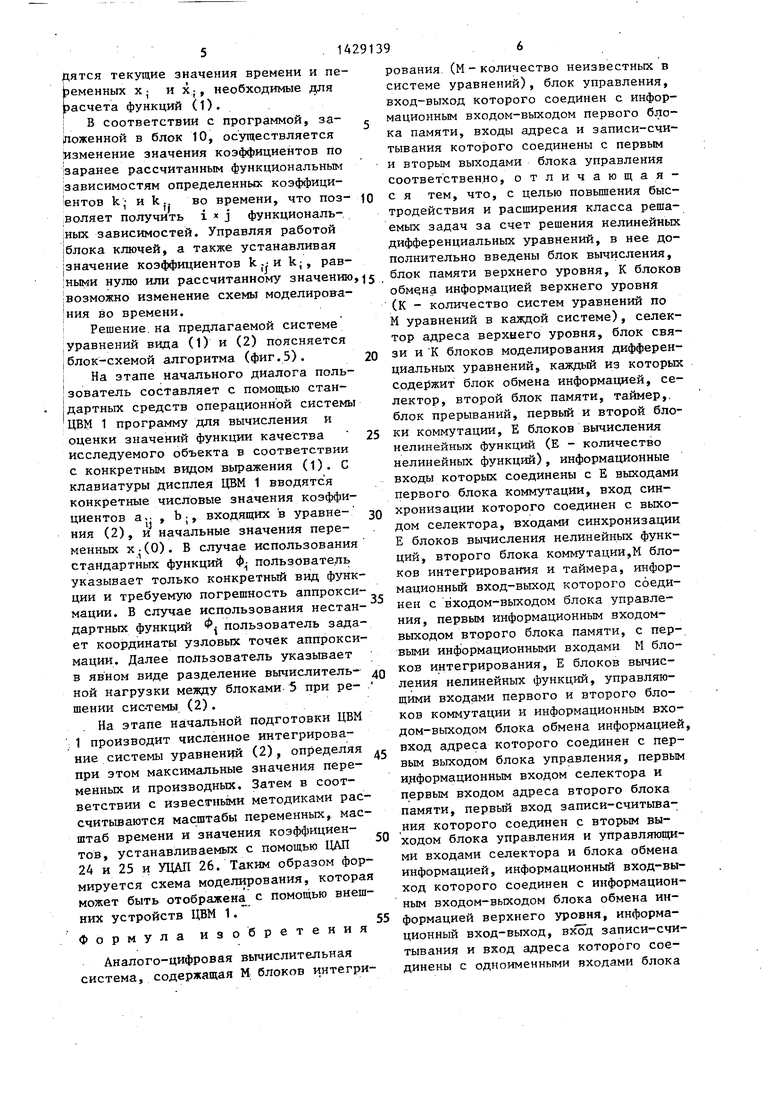
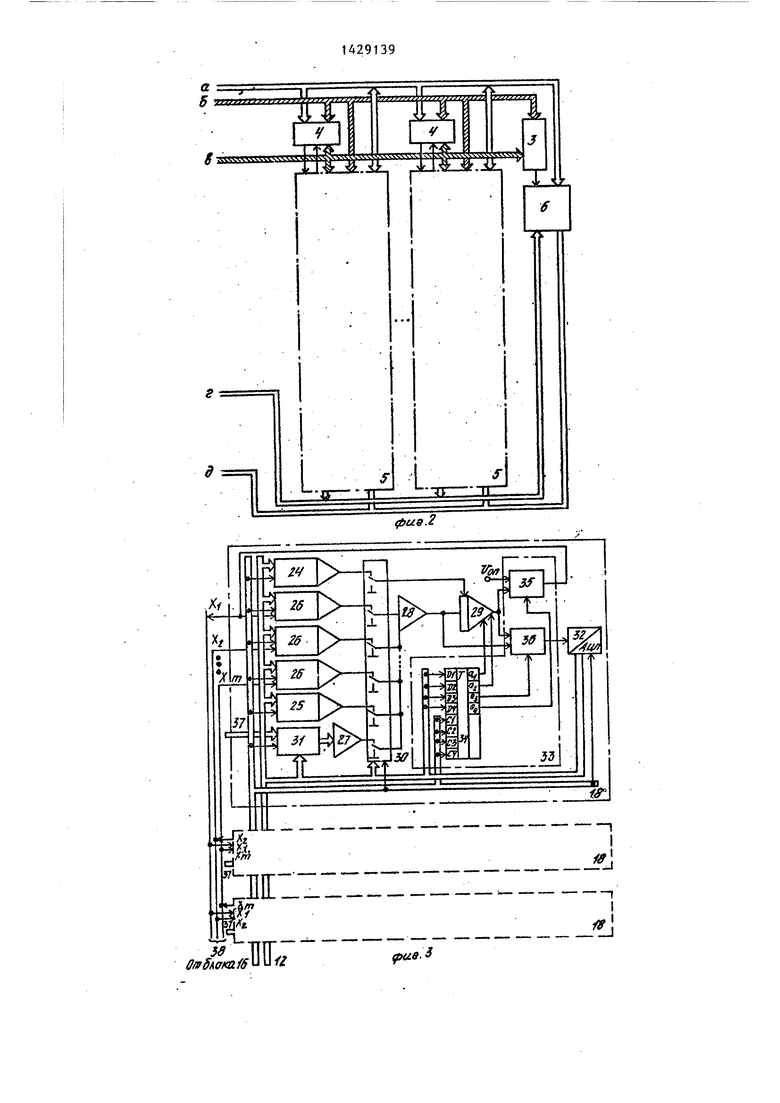
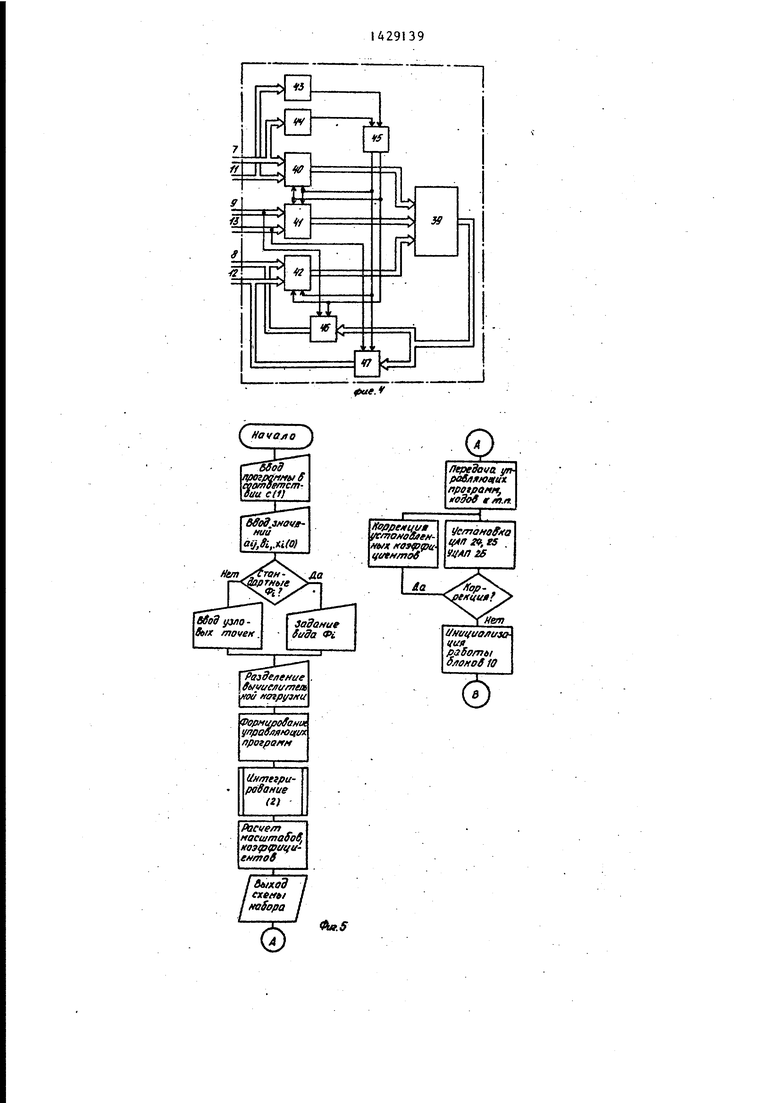
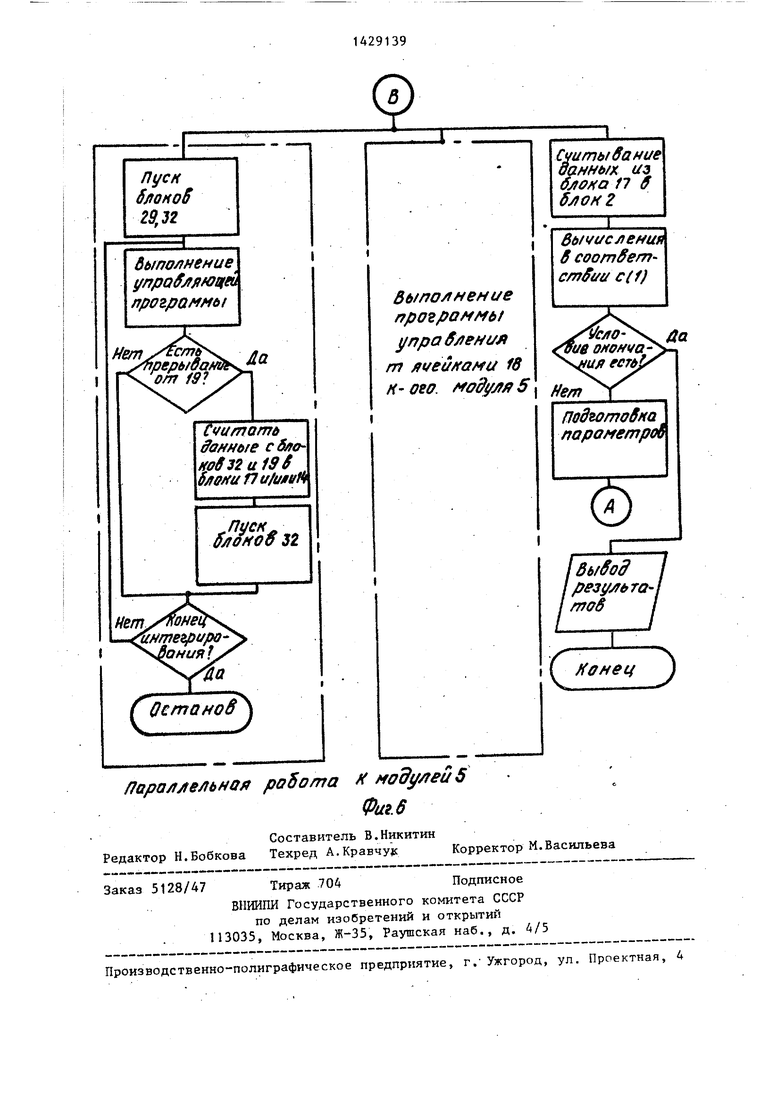
Цель изобретения - повышение быстродействия и расширения класса решаемых задач за счет решения нелиней- ных дифференциальных уравнений. : На фиг. 1 и 2 показан пример реализации аналого-цифровой вычислительной системы; на фиг. 3 - блок-схема блока I интегрирования; на фиг. 4 блок-схема I второго блока памяти; на фиг. 5 и 6 - I блок-схемы алгоритма функционирования i аналого-цифровой вычислительной сис- i темы.
; Система содержит ЦВМ 1, блок 2 па- мяти верхнего уровня, селектор 3 ад- 1 рёса верхнего уровня, блоки 4 обмена, информацией верхнего уровня, блоки 5 моделирования дифференциальных уравнений, блок 6 связи, соединения 7-9. .Каждый блок 5 моделирования дифференциальных уравнений содержит блок 10 управления, соединения 11-13 адреса, первый блок 14 памяти, блок 15 обмена информацией, селектор 16, второй блок 17 памяти, блок 18 интегрирования, таймер 19, блок 20 прерываний, блоки 21 и 22 коммутации, блоки 23 вычисления нелинейных функций.
Блок 18 интегрирования с.одержит ЦАП 24 и 25, m умножающих ЦАП (УДАЛ) 26, сумматоры 27 и 28, интегратор 29, блоки 30 и 31 ключей, АЦП 32, блок 33 контроля и управления, в который входят регистр 34 и коммутаторы 35 и 36, соединения 37 и 38.
Второй блок 17 памяти содержит запоминающее устройство 39, мультиплексоры 40-42, дешифраторы 43 и 44, арбитр 45 шин, шинные формирователи 46 и 47.
Исходная задача сводится к определению значений
у f(x,x,, ..., X;, X,, ..., х„,х)
(1)
у - функция качества исследуемого объекта,X ., i. 1,2,..,
.
х. - переменные состояния, получаемые при моделировании динамических процессов,за 5
данных дифференциальными уравнениями вида
х., а,,х,+...+а.х.+ ...,+ Ф,;
i ,-г.,;
х. а,. х, + .. .+а ;;Х,
X
. , + ...+а Х.+ ...+а „х„+Ь„+ф„;
.J
t2)
при известных начальных условиях
х-(0), причем Ф, Х f. - нелиней J
ные функции, а,-; - коэффициенты. Система работает следующим образом.
ь
25
20 .
5 0
5
о
5
В исходном состоянии регистр 34 блока 33 обнуляется и на первом и втором входах регистра 34 формируется код 01, в соответствии с которым все интеграторы 29 аналоговых ячеек устанавливаются в режим Исходное положение. Исходное состояние остальных блоков произвольное.
На этапе подготовки загружается в ЦВМ 1 составленная пользователем программа определения у. в соответствии с (1), вводятся значения коэффициентов Ь. и а - и описания функций f в уравнениях (2). Программными средствами автоматизации программирования аналоговой части задачи по коэффициентам Ь.и а;- уравнений (2) по известной методике определения коэффициентов передач интеграторов 29 и сумматоров 28 рассчитываются kj и kj, для УЦАП 26, определяются коды узловых точек аппроксимации нелинейных функций f, вычисляются массивы кодов управления теми коэффициентами УЦАП 26, которые изменяются в функции времени либо в зависимости от значений х., определяются коды управления блоками 6 автоматической связи модулей и блоками 21 и 22 коммутации.
Под управлением операционной системы ЦВМ 1 производится загрузка через блоки 4 и 15 в блок 14 программы управления блоками 5, а также пользовательских подпрограмм, реализующих логические зависимости. В блок 14 передаются коды рассчитанных на ЦВМ 1 коэффициентов, коды узлов точек нелинейньпс функций, коды управления блоками 21 и 22,
Работа программ управления блоками 5-происходит по инициативе программы ЦВМ 1, обеспечивая набор схемы моделирования с помощью блоков 6, 21 г к 22, установку коэффициентов в УЦАП 26, задание режима работы в процессе решения задачи интегратором 29 каждого из блоков 18 интегрирования. Установка коэффициентов УЦАЛ 26 и начапь-10 ных условий интеграторов 29 через ЦАП 24 по шине 12 производится с помощью селектора 16. В процессе установки значений коэффициентов k.. на
15
на схема моделирования в блоках 18 с помощью блоков 21, 22, 6 и yUATI; установлены необходимые начальные условия интеграторов 29; занесены необходимые функциональные згвиснмос- ти в блоки 23 вычисления нелинейных функций.
При поступлении сигнала Пуск по инициативе программы ЦВМ 1 начинается решение уравнений (2). При этом запускаются все блоки 10, в регистры 34 заносятся коды индивидуального управления интеграторами 29, которые переводятся в строго определенный режим работы (Исходное положенче, Пуск, Останов).
В таймер 19 предварительно эаночения с помощью АЦП 32, вход которого 20 сится число, соответствующее необхокоммутатором 36 подключен к выходу
сумматора 28. При этом управление
коммутаторами 35 и 36 осуществляется
с третьего и четвертого выходов ре-.
гистра 34, информация в который поступает с блока 10 управления.
Таким образом, с помощью блока 33
устраняется погрешность, вносимая
внешними соединительными цепями, так
как контроль коэффициентов k осуществляется непосредственно на выходе
сумматора 28. С помощью блока 30 кгаочей входы сз мматоров 28 аналоговой
УЦАП 26 коммутатор 35 подключает к входу соответствующего УЦАП 26 опорные напряжения и„ . После записи значения коэффициента k j. в УЦАП 26 осуществляется контроль записанного знадимому временному интервалу, по истечении которого на выходе таймера 19 возникает сигнал, поступающий на вход блока 20 прерываний. Блок 10 произво- 25 дит обработку прерывания и приступает к дальнейшему выполнению прерваннс-п программы. При необходимости в соответствии с программой блока 10 с выходного регистра таймера 19 считывается текущее время, которое заносится в фиксированную ячейку блока 17 и постоянно там обновляется с заданной дискретностью.
30
Под управлением блока 10 осущестзначения а
в
ячейки подключаются к выходам УЦАЛ 26 или к нулевой шине, причем управление 35 ляется последовательный пуск АЦП 32 каждым ключом осуществляется от блока всех блоков 18 интегрирования К вхо- 10, что позволяет параллельно менять дам АЦП 32 предварительно через коммутатор 36 подключаются координаты X J или X j. .По сигналу Конец преобразования или согласно программе, введенной в микропроцессор, пронсхо- дит считыв-ание преобразованной информации и запись ее в соответствующие ячей15и памяти второго блока 1 памяти. Время обращения к АЦП 32 выЧ
принимает значение
процессе решения, если О либо 1.
40
Воспроизведение нелинейных функций ф- уравнений (2) обеспечивается блсгками 23, подключение выходов которых к входам сумматора 27 производится блоком 31 ключей. Подача на вход блоков 23 переменных х. в составе . 45 блока 5 производится первым блоком 21 бирается таким образом, чтобы он не
15
димому временному интервалу, по истечении которого на выходе таймера 19 возникает сигнал, поступающий на вход блока 20 прерываний. Блок 10 произво- 5 дит обработку прерывания и приступает к дальнейшему выполнению прерваннс-п программы. При необходимости в соответствии с программой блока 10 с выходного регистра таймера 19 считывается текущее время, которое заносится в фиксированную ячейку блока 17 и постоянно там обновляется с заданной дискретностью.
Под управлением блока 10 осущест0
5 ляется последовательный пуск АЦП 32 всех блоков 18 интегрирования К вхо- дам АЦП 32 предварительно через коммутатор 36 подключаются координаты X J или X j. .По сигналу Конец преобразования или согласно программе, введенной в микропроцессор, пронсхо- дит считыв-ание преобразованной информации и запись ее в соответствующие ячей15и памяти второго блока 1 памяти. Время обращения к АЦП 32 вы35
40
45 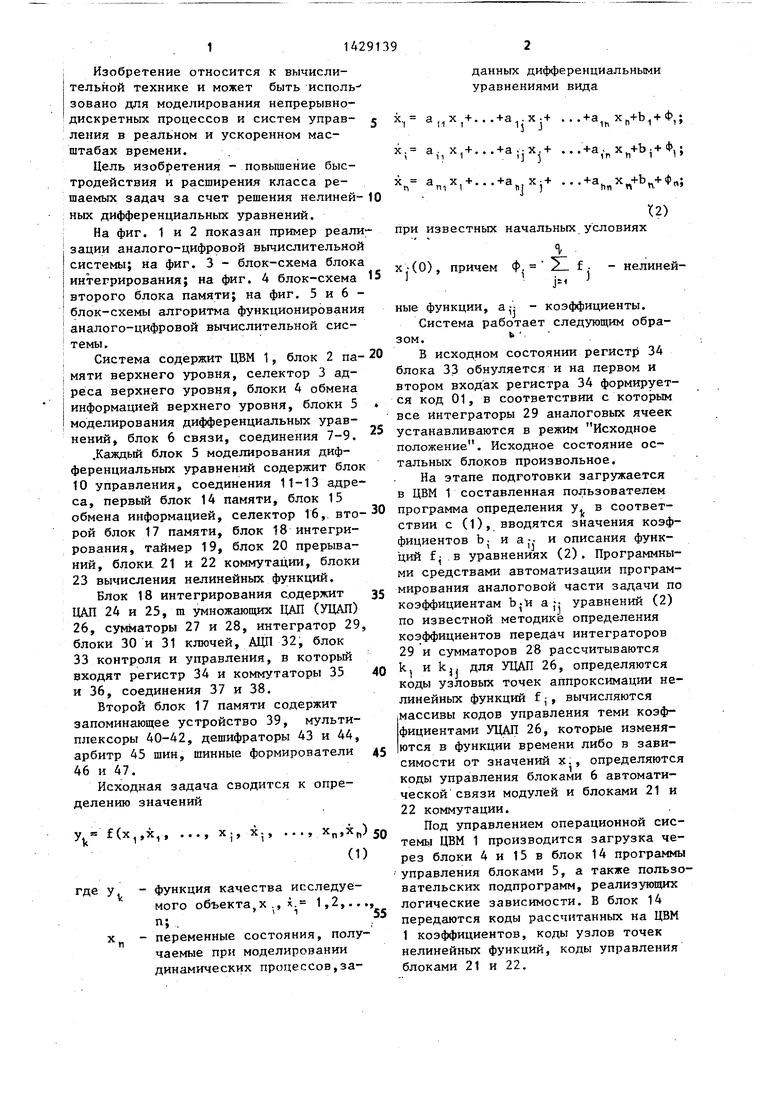
| название | год | авторы | номер документа |
|---|---|---|---|
| Аналого-цифровое вычислительное устройство | 1988 |
|
SU1501103A1 |
| Аналого-цифровое устройство для решения системы дифференциальных уравнений | 1987 |
|
SU1462378A1 |
| Аналого-цифровая вычислительная система | 1987 |
|
SU1509955A1 |
| Аналого-цифровая вычислительная система и аналоговая вычислительная машина (ее варианты) | 1983 |
|
SU1259300A1 |
| Устройство для решения нелинейных краевых задач | 1987 |
|
SU1683028A1 |
| Функциональный преобразователь | 1985 |
|
SU1249547A1 |
| Устройство для воспроизведения функций двух переменных | 1987 |
|
SU1517046A1 |
| Устройство для решения краевых задач | 1983 |
|
SU1149286A1 |
| Система регулирования продолжительности вулканизации изделий | 1980 |
|
SU903187A1 |
| Устройство для обмена информацией между цифровой и аналоговой вычислительными машинами | 1986 |
|
SU1348844A1 |
Изобретение относится к вычислительной технике и может быть использовано для моделирования непрерывно- дискретных процессов и систем управления в-реальном и ускоренном масштабах времени. Целью изобретения является повьшение быстродействия и расширение класса решаемых задач эа счет решения нелинейных дифференциальных уравнений. Аналого-цифровая вычислительная система содержит ЦВМ, блок памяти верхнего уровня, селектор адреса верхнего уровня, блоки обмена информацией верхнего уровня, блоки моделирования дифференциальных урав- нений блок связи, соединения Исход- ная задача сводится к определению значений у, f X|,k, ..., x-.,if х,,х„, где у - функция качества исследуемого объекта, X j, х, 1,2,.,., п, X „ - переменные состояния, получаемые при моделировании динамических процессов, заданных, дифференциальны- { ми уравнениями вида х., а „ х. + :.., + +...+ а,„х + Ц + ф,; ..., х„-« ,+ ... + + ... + + + bvfl при известных начальных ус(Л с ловиях х-(0), где Ф нейные функции, а .. 6 ил. 1 i., нели - коэффициенты. ю со со со
коммутации, а переменных с других блоков 5 через блок 22. Задание адресов и кодо в управления блоков 21 и 22 производится блоками 10 управления с помощью селектора 16,
После проведен 1я этапа подготовки к решению уравнений (2) в блок 2 занесена программа решения уравнений (2), в блоки 14 занесены соответству- ющие пользовательские программы, для блоков 5 проведена установка кона УЦАП 26 и их корректировка с помощью блока 33; набраэффициентов kj.
простаивал , что достигается распараллеливанием вычислительного процесса и обслуживанием каждым блоком 10 ограниченного количества АЦП 32, Таким образомS в определенных ячейках блока 17 ккформадия о необходи - мых координатах Xj,, xi постоянно обновляется с дискретностью t
+ t
о
где t
tnp
(
- время преобразова
ння АЦП 32; tjj - время обращения к АЦП 32.
По мере необходимости ЦВМ 1 обращается к ячейкам блока 17, где нахо5. 1А
цятся текущие значения времени и переменных X ; ИХ;, необходимые для расчета функций (1). I В соответствии с программой, за- Поженной в блок 10, осуществляется Изменение значения коэффициентов по 1заранее рассчитанным функциональным |зависимостям определенных коэфс ици- нтов k,- и k. во времени, что поз- .воляет получить i j функциональных зависимостей. Управляя работой |блока ключей, а также устанавливая |значение коэффициентов k . и k;, рав- |ными нулю или рассчитанному значению |возможно изменение схемы моделирона- |ния во времени.
: Решение,на предлагаемой системе :уравнений вида (1) и (2) поясняется Iблок-схемой алгоритма (фиг.5). I На этапе начального диалога поль- Iзователь составляет с помощью стан- j дартных средств операционной системы ;ЦВМ 1 программу для вычисления и оценки значений функции качества исследуемого объекта в соответствии с конкретным видом вьфажения (1). С клавиатуры дисплея ЦВМ 1 вводятс я конкретные числовые значения коэффициентов а.. , bj, входящих в уравне- ния (2), и начальные значения переменных х(0). В случае использования стандартных функций Ф пользователь указывает только конкретный вид функции и требуемую погрещность аппроксимации. В случае использования нестандартных функций пользователь задает координаты узловых точек аппроксимации. Далее пользователь указьгоает в явном виде разделение вычислитель- ной нагрузки между блоками 5 при ре- шении сис-темы (2) .
На этапе начальной подготовки ЦВМ 1 производит численное интегрирование системы уравнений (2), определяя при этом максимальные значения переменных и производных. Затем в соответствии с известньтми методиками рас- считьшаются масштабы переменных, масштаб времени и значения коэффициен- тов, устанавливаемых с помощью ЦАП 24 и 25 и УЦАП 26. Таким образом формируется схема моделирования, которая может быть отображена с помощью внешних устройств ЦВМ 1. Формула изобретения
Аналого-цифровая вычислительная система, содержащая М блоков интегри
5
0 5 О д
5
396
рования (М - количество неизвестных в системе уравнений), блок управления, вход-выход которого соединен с информационным входом-выходом первого блока памяти, входы адреса и записи-считывания которого соединены с первым и вторым выходами блока управления соответственно, отличающая- с я тем, что, с целью повьш1ения быстродействия и расширения класса решаемых задач за счет решения нелинейных дифференциальных уравнений, в нее дополнительно введены блок вычисления, блок памяти верхнего уровня, К блоков обмана информацией верхнего уровня (К - количество систем уравнений по М уравнений в каждой системе), селектор адреса верхнего уровня, блок связи и К блоков моделирования дифференциальных уравнений, каждый из которых содержит блок обмена информацией, селектор, второй блок памяти, таймер,, блок прерываний, первый и второй блоки коммутации, Е блоков вычисления нелинейных функций (Е - количество нелинейных функций), информационные входы которых соединены с Е выходами первого блока коммутации, вход синхронизации которого соединен с выходом селектора, входами синхронизации Е блоков вычисления нелинейных функций, второго блока коммутации,М блоков интегрирования и таймера, информационный вход-выход которого соединен с входом-выходом блока управления, первым информационным входом- выходом второго блока памяти, с первыми информационными входами И блоков интегрирования, Е блоков вычисления нелинейных функций, управляющими входами первого и второго блоков коммутации и информационным входом-выходом блока обмена информацией, вход адреса которого соединен с первым выходом блока управления, первым информационным входом селектора и первым входом адреса второго блока памяти, первый вход записи-считьгоа- ния которого соединен с вторым выходом блока управления и управляющими входами селектора и блока обмена информацией, информационный вход-выход которого соединен с информационным входом-выходом блока обмена информацией верхнего уровня, информационный вход-выход, вход записи-считывания и вход адреса которого соединены с одноименными входами блока
памяти верхнего уровня, (К-1) блоками обмена информацией верхнего уровня, вторыми одноименными входами второго блока памяти и являются одноименными входами блока вычисления, первый и второй информационные входы селектора адреса верхнего уровня соединены с входами записи-считывания и адреса блока вычисления, а выход соединен с входом задания режима блока связи, информационный вход-выход которого соединен с информационным входом-выходом устройства, а выход блока связи соединен с первым информационным входом второго блока коммутации всех К блоков моделирования дифференциальных уравнений, информационный выход второго блока коммутации соединен с первым информационным входом первого блока коммутации
и вторыми информационными входами .М бло-ков интегрирования,информационный вход-выход блока интегрирования соединен с информационными входами-выходами М-1 блоков интегрирования,
вторым информационным входом первого блока коммутации и информационным вход ом блока связи, выходы Е блоков вычисления нелинейных функций соединены с группой информационных входов
второго блока коммутации, информационный вход блока прерываний соединен с выходом таймера, а выход - с входом синхронизации блока управления.
Фиг.1
L Ji J
--g- TT- nTCZ.
Htl
M
B/sSxamfS
:БК
фи9.2
.e
3
/ ЛыхоЗ I I ехмы I / mtSopa I
fta.S
Пусн
SflOHoS
2ff.32
дыполнение t/rtpoff/fflfoaim программы
Нет
С атоглй ffoffHtue cSffo- 1ювЭ2и19$ MOffu П и/и/т
Пусн., 0/10ff00 32
Д .
Считывание даннь/ц из
П б
6/fOH 2
Вычисления В coomSefTtC/7ffft/U C(f)
H Oeo. odi//f/f5 Hem
Подготобни параметров
Вывод
f7fO6
С
/{онец
| Устройство для считывания графической информации | 1985 |
|
SU1259303A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Пухов Г.Е., Самойлов В.Д., Аристов В.В | |||
| Автоматизированные аналого- цифровые устройства моделирования | |||
| - Киев: Техника, 1974, с.172, рис.7в. | |||
