Изобретение относится к автоматическому управлению и предназначено для использования в системах управления, содержащих следящие приводы.
Известны корректирующие устройства для следящего электропривода, содержащие последовательно соединенные преобразователь, фазовый дискриминатор и сумматор управляющих воздействий, датчик обратной связи, выход которого подключен к соответствующему входу фазового дискриминатора, и генератор тактовых импульсов, соединенный с преобразователем и датчиком обратной связи.
Однако известные устройства имеют недостаточную точность работы.
Целью изобретения является повышение точности работы.
Для этого устройство содержит последовательно соединенные дешифратор рассогласования, регистр памяти ошибки и сумматор сигнала компенсации, причем один вход дешифратора рассогласования соединен с преобразователем, а другой - с выходом датчика обратной связи, выход преобразователя соединен с дополнительным входом сумматора сигнала компенсации, выход которого нодключен к соответствующему входу сумматора управляющих воздействий.
Изобретение пояснено чертежом.
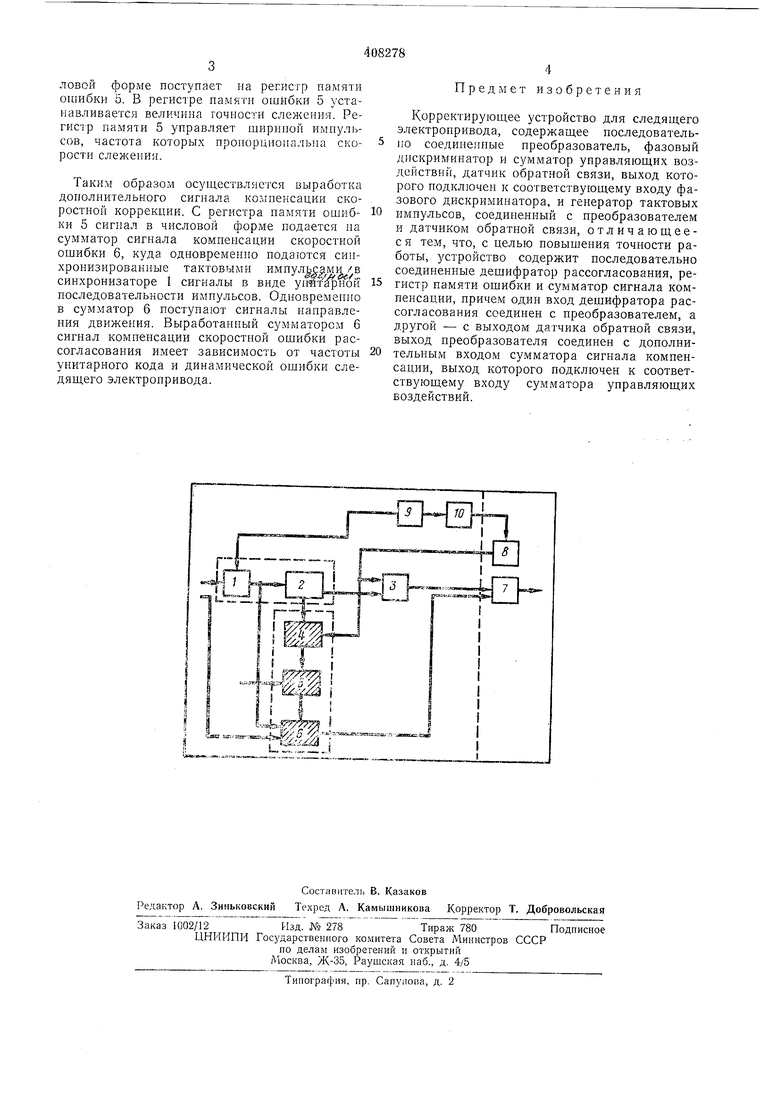
На чертеже нриведена функциональная блок-схема устройства.
Корректирующее устройство для следящего электропривода содержит синхронизатор программы 1, делитель частоты сигнала пути 2, фазовый дискриминатор 3, дешифратор рассогласования 4, регистр памяти ошибки 5, сумматор сигнала комненсации скоростной ошибки 6, сумматор управляющих воздействий 7, датчик обратной связи 8, генератор тактовых импульсов 9 и делитель частоты имнульсов 10.
Устройство работает следующим образом.
Система управления принимает управляющие сигналы (в унитарном коде) в виде импульсов определенной частоты следования: фазовый дискриминатор 3 сравнивает их с сигналами датчика обратной связи 8, выполненного, например, в виде фазо-импульсного датчика, и вырабатывает управляющие широтномодулированные импульсные сигналы перемещения, нронорциональные рассогласованию, которые подаются на сумматор управляющего воздействия 7.
С дешифратора рассогласования 4 нри поступлении сигнала с датчика обратной связи 8 следящего электронривода снимается ошибка рассогласования, пропорциональная разности фаз управляющего сигнала пути в числовой форме. Сигнал рассогласования в числовой форме поступает на регистр памяти ошибки 5. В регистре памяти ошибки 5 устанавливается величина гочности слежения. Регистр памяти 5 управляет шириной импул сов, частота которых пропорциональна скорости слежения.
Таким образом осуществляется выработка дополнительного сигнала комненсации скоростной коррекции. С регистра памяти ошибки 5 сигнал в числовой форме подается па сумматор сигнала компенсации скоростной ошибки 6, куда одновременно подаются синхронизированные тактовыми импул дми.в синхронизаторе 1 сигналы в виде уШтарнон последовательности импульсов. Одновременно в сумматор 6 поступают сигналы направления движения. Выработанный сумматором 6 сигнал компенсации скоростной ошибки рассогласования и.меет зависимость от частоты унитарного кода и динамической ошибки следящего электропривода.
Предмет изобретения
Корректирующее устройство для следящего электропривода, содержащее последовательно соединенные преобразователь, фазовый дискриминатор и сумматор управляющих воздействий, датчик обратной связи, выход которого подключен к соответствующему входу фазового дискриминатора, и генератор тактовых импульсов, соединенный с преобразователем и датчиком обратной связи, отличающеес я тем, что, с целью повышения точности работы, устройство содержит последовательно соединенные дешифратор рассогласования, регистр памяти ошибки и сумматор сигнала компенсации, причем один вход дешифратора рассогласования соединен с преобразователем, а другой - с выходом датчика обратной связи, выход преобразователя соединен с дополнительным входом сумматора сигнала компенсации, выход которого подключен к соответствующему входу сумматора управляющих воздействий.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система программного управления станком | 1977 |
|
SU714358A1 |
| Устройство для программного управленияпРиВОдОМ | 1978 |
|
SU798724A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Система программного управленияМЕТАллОРЕжущиМ CTAHKOM | 1978 |
|
SU805262A1 |
| Система числового программного управления | 1986 |
|
SU1386963A1 |
| Следящий электропривод с компенсацией люфта | 1985 |
|
SU1273875A1 |
| Устройство для программного управления положением объекта | 1987 |
|
SU1520479A1 |
| Система управления многоканальнымэлЕКТРОпРиВОдОМ РОбОТА | 1979 |
|
SU805246A1 |
| Следящий электропривод с компенсацией люфта | 1980 |
|
SU964574A1 |
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
