1
Изобретение относите к области автоматики н может быть использовано для оиределсиия еисправного гнроскоинческого датчика системы автоматического управлепия летаiejibiioro аппарата.
Известны устройства, прннцин действия которых осиоваи на сравиепни сигналов трех и более датчиков с иомоп,ью, например, кворум элементов. В дублированных системах для определения неисправного датчика применяют доиол 1нтелы; мй коптрольиый датчик либо иолучают необходимые избыточиые сигааль путем дифференцирования снгпалов угла; отключение отказавшего датчика производится с нолилцью логической схемы.
Однако, иеиоередствеииое сравнение сигпало15 трех н более датчиков угловых скоростей затруд|1ело из-за иаличия высокочастотной помехи, ч го вызывает необходимость установки фильтрую цих устройств. При дефференциро15аиин сигпалов датчиков угла также необходпма устапоБка фильтров, что усложняет схему контроля. KpOAie того, при двух последовательных отказах сун1,ествующие устройства ме в состояиии определить второй отка: ав ннй датчик.
Цель изобретения - повышение наделшостн и упрощение устройства для контроля исправности гироскопических датчиков.
Цель достигается тем, что в предлагаемом
устройстве используют интеграторы сигналов угловых скоростей, нозволяющне получпть избыточиые спгпал для логнческой схемы н отфильтровать помехи. В качестве сравннваюших устройств исиользуют кворум-элемеит. Это дает возможиость упростить схему устройства, исключить 1,лия1П1е дрейфа пуля интеграторов на работу логической схемы н повысить надежность системы автомагнческого унравлення летательного аппарата.
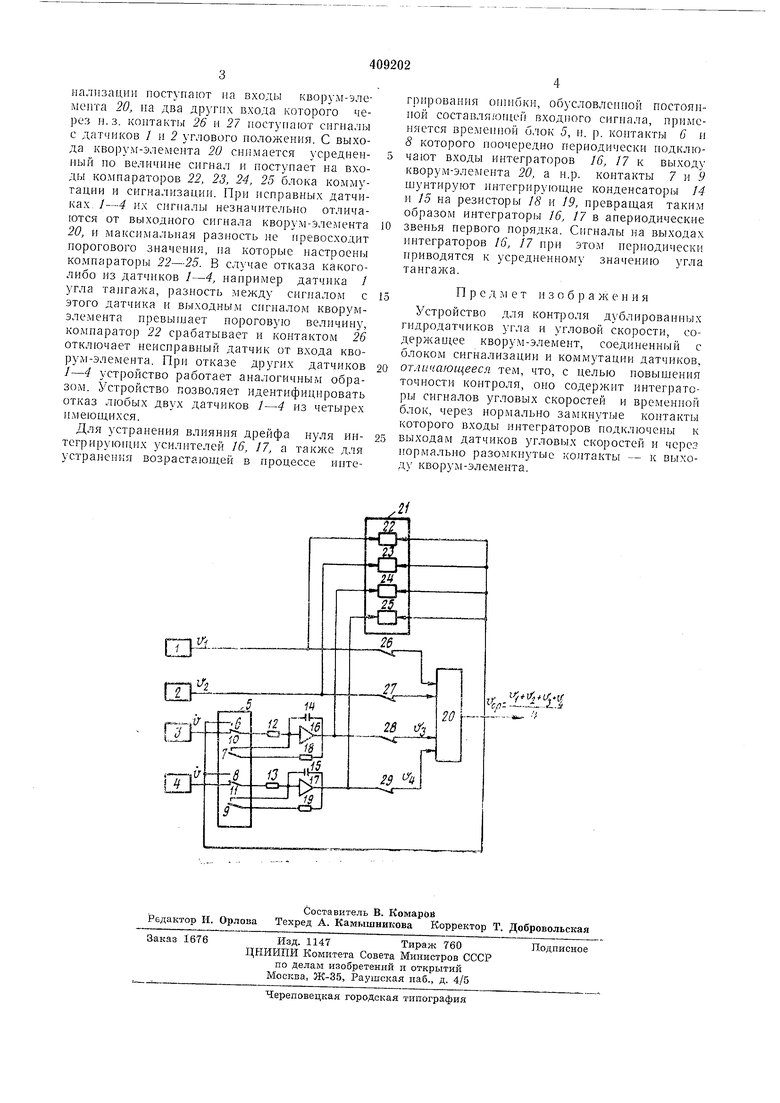
Схема устройства (для капала гаигажа) представлена па чертеже.
Устройство содержит датчики 1 п 2 угла тангажа; датчики 3 и 4 угловой скорости (демпфируюпл.не гироскопы); временной блок 5 с н. р. контактами 6-9 н и.з. контактами 10, 11; резисторы 12, 13; иитегрирующие коиденсаторы М, /5; питеграторы (онерационные усилители) 16, 17; резисторы /6, .5; кворумэлемеит 20; блок 21 коммутации и снгнализапии; комиараторы 22, 23, 24, 25 соответствеино с н.э. контактами 26, 27, 28, 29.
Работает устройство следуюиигм образом.
Сигналы, пропорциональные угловой скорости, поступают с выхода датчиков 3 и 4 угловой скорости через н.з. контакты W и // временного блока 5 на входы интеграторов 16, 17- Проиитегрированиые сигналы, нроиорпнопальпыс угловому ноложенню, через н.з. контакты 28 и 29 блока 21 коммутации и сиг
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| УСТРОЙСТВО КОНТРОЛЯ РАБОТОСПОСОБНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2013 |
|
RU2526500C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РАЗВЕДОЧНЫХ СКВАЖИН | 1996 |
|
RU2109942C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЗАБОЙНЫХ СКВАЖИН | 2001 |
|
RU2204712C2 |
| Способ управления коррекцией эксцентриситета при расточке глубоких отверстий и устройство для его осуществления | 1985 |
|
SU1292984A1 |
| Устройство для диагностирования системы смазки четырехтактного двигателя внутреннего сгорания | 1986 |
|
SU1390519A1 |
| Противоблокировочная тормозная система автомобиля | 1990 |
|
SU1781107A1 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2101749C1 |
| Устройство для контроля датчиковуглОВыХ пЕРЕМЕщЕНий | 1979 |
|
SU827977A2 |
| ПЕЛЕНГАТОР ИСТОЧНИКОВ АКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ | 1993 |
|
RU2048678C1 |
