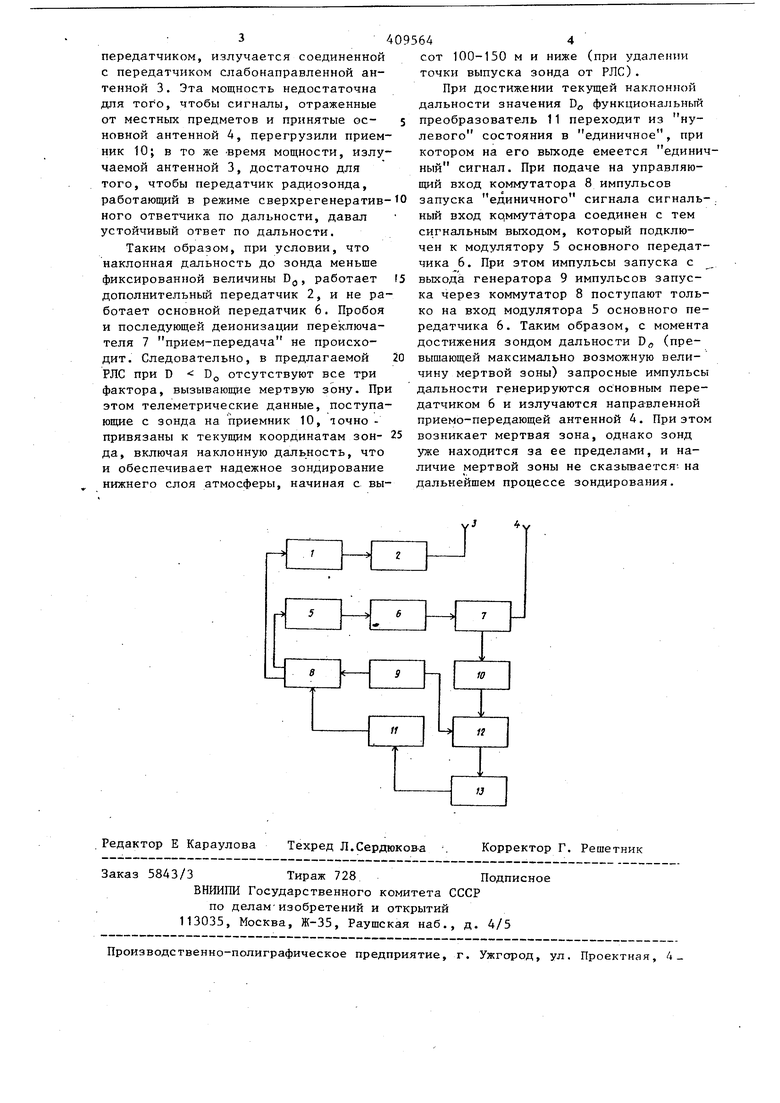
Известны метеорологические радиолокационные станции (РЛС) для темпер турно-ветрового зондирования атмосфе ры путем сопровождения радиозондов, транспортируемых газонаполненными ша рами-пилотами. Однако минимальная да ность действия таких РЛС, начиная с которой производится уверенное автосопровождение радиозонда по дальности (мертвая зона РЛС), составляет 900 - 2300 м. Наличие большой мертвой зоны приводит к потере данных о распределении ветра, температуре, других метеопараметров в нижнем слое атмосферы толщиной до 1,5 км. Предлагаемое устройство отличается от известных тем, что с целью уменьшения мертвой зоны при опровож дении радиозондов на малых дальностях до величины, обусловленной лишь длительностью зондирующего импульса РЛС снабжена дополнительным передатчиком, мощность которого меньше мощности основного передатчика, модулятором дополнительного передатчика, слаб онаправленной,антенной,соединенной с выходом дополнительного передатчика, коммутатором импульсов запуска передатчика с управляющим и сигнальным входами и двумя раздельными сигнальными выходами, а также функциональным преобразователем, реа лизующим зависимость типа единичногс скачка, выраженную формулой K.e(-D - Dj, где 9 - выходной параметр преобразователя ; К - масптабный коэффициент; e(D-D,) fO ПРИ D - D - единичпри D на функция от аргумента (D-D текущее значение наклонной дальности; некоторое фиксированное значение наклонной дальности. выполненным, например, в виде профил ного кулачка, установленного на валу шкального механизма электромеханичес кой системы дальности. Вход функционального преобразователя соединен с отсчетным устройством системы даль- : ности, его выход соединен с управляю щим входом коммутатора импульсов запуска передатчика, сигнальный вход Коммутатора импульсов запуска соедиимпульсовнен С выходом генератора выходы соесигнальныезапуска, его динены соответственно с входами модуляторов основного и дополнительного передатчиков, причем при наличии на управляющем входе коммутатора импульсов запуска нулевого сигнала его сигнальный вход подключен к тому из сигнальных выходов, который соединен с входом модулятора дополнительного передатчика. На чертеже представлена блок-схема предлагаемой метеорологической РЛС. В РЛС входят модулятор 1 дополнительного передатчика 2, вспомогательная слабонаправленная антенна 3, направленная приемо-передающая антенна 4, модулятор 5 основного передатчика 6, переключатель 7 прием-передача, коммутатор 8 импульсов запуска передатчика с управляющим -и сигнальным входами и двумя раздельными сигнальными выходами, генератор 9 импульсов запуска передатчика, приемник 10, функциональный преобразователь 11, система 12 дальности, отсчетное устройство 13 системы дальности. РЛС работает следующим образом. Выпускаемый в непосредственной близости от РЛС радиозонд поднимается за счет подъемной силы щара-пилота и сносится в направлении ветра. До момента, пока наклонная дальность между РЛС и зондом не достигнет некоторой заранее выбранной величины DO, функциональный преобразователь 11, соединенный с отсчетным устройством системы 12 дальности, находится в состоянии, при котором на его выходе имеется сигнал, условно называемый сигналом нулевого состояния или просто нулевым сигналом. Выход функционального преобразователя 11 соединен с управляющим входом коммуTaTojja 8 импульсов запуска. При подаче на управляющий вход зтого коммутатора нулевого сигнала сигнальный вход коммутатора соединен с тем из сигнальных выходов, который подключен к модулятору 1 дополнительного передатчика 2. При этом импульйы запуска с выхода генератора 9 импульсов запуска через коммутатор В поступают только на вход модулятора 1 дополнительного передатчика 2. Мощность, генерируемая дополнительным
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННО-РАДИОЛОКАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2805163C1 |
| СПОСОБ ДОПЛЕРОВСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2808775C1 |
| Устройство для передачи информации при высотном зондировании атмосферы | 1977 |
|
SU763824A2 |
| РАДИОЛОКАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2793597C1 |
| СПОСОБ ПЕРЕДАЧИ КОМАНД УПРАВЛЕНИЯ НА БОРТ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2804516C1 |
| АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД С ГОМОДИННЫМ ПРИЕМОПЕРЕДАТЧИКОМ СИСТЕМЫ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2024 |
|
RU2829602C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2084922C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ С ФАЗОМОДУЛИРОВАННЫМ КАНАЛОМ ТЕЛЕМЕТРИИ | 2021 |
|
RU2787777C1 |
| СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ С ПАКЕТНОЙ ПЕРЕДАЧЕЙ МЕТЕОРОЛОГИЧЕСКОЙ ИНФОРМАЦИИ | 2013 |
|
RU2529177C1 |
| СПОСОБ АВТОНОМНОЙ ВЫРАБОТКИ ИНФОРМАЦИИ ДЛЯ ПРОВОДКИ СУДОВ В УЗКИХ ФАРВАТЕРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2097784C1 |
МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ТЕШЕРАТУРНО-ВЕТ- РОВОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ ПРИ ПОМОЩИ РАДИОЗОНДОВ .с АКТИВНЫМ ОТВЕТОМ ПО .ЦАЛЬНОСТИ, содержащая направленную приемо-пёредающую антенну, переключатель "прием-передача", пе-- редатчик, модулятор, приемник, систему дальности, отсчетное устройство системы дальности и генератор импульсов запуска передатчика, один из выходов которого соединен с системой дальности, а другой - с передатчиком, отлича,ющаяся тем, что, с целью уменьшения мертвой_ зоны, при сопровождении радиозондов на малых дальностях, до величины, обусловленной лишь длительностью зондирующего импульса, она снабжена дополнительным передатчиком, мощность которого меньше мощности основного передатчика, модулятором дополнительного передатчика, слабонаправ- •ленной антенной, соединенной с выходом дополнительного передатчика,коммутатором импульсов запуска передатчика с управляющим и сигнальным входами и двумя раздельными сигнальными выходами, а также функциональным преобразователем, реализующим зависимость типа единичного скачка, выраженную формулой(f) =К-е (D - Вд) ,''«-4,)=(?SHD.^S:]- —функция от аргумента (D-D^); D - текущее значение наклонной дальности;В„ - некоторое фиксированное зна-„очение наклонной дальности, выполнен- '«gным, например, в виде профильного кулачка, установленного на валу шкального механизма электромеханической системы дальности, причем вход функционального преобразователя соединен с отсчетным устройством системы дальности, его выход соединен с управляющим входом коммутатора импульсов запуска передатчика, сигнальный вход коммутатора импульсов запуска соединен с выходом генератора импульсов запуска, его сигнальные выходы соединены соответственно с входами моду- ляторов основного и дополнительного передатчиков, причем при наличии на управляющем входе коммутатора импульсов запуска "нулевого" сигнала его сигнальный вход соединен с тем из сигнальных выходов, который соединен с входом модулятора дополнительного передатчика.(ЛсоО1о»N^