Изобретение относится к грузонодъемиы.м устройствам, в частности к строительны.м кранам, и может найти применение при возведении вертикальных сооружеиий.
Известен кран для возведения вертикальных сооружений нреимущественно с секционированным каркасом, содержащий охватывающий сооружение остов, несущий консольную балку с грузовой тележкой, и противовесную платформу с канатными лебедка.ми. Однако прот:1вовес11ая нлатформа с канатными лебедка.мн жестко ирмкренлена к остову, из-за чего невозможно нроизводить нерестановку крапа по высоте сооружеппя посредство.м лебедок. Это усложняет монтажные работы но возведению сооруження.
Целью изобретения является упрощение перестановки крана но высоте сооружения.
Для этого у иредлагаемого крапа остов снабжен вертикальными направляющими для шарнирных опор рамы противовесной платформы, последпяя выиолпепа с возможностью подъема и опускания но указанным направляюни1м, разворота и нонеречного смещения с номощью грузовой тележки консольной балки.
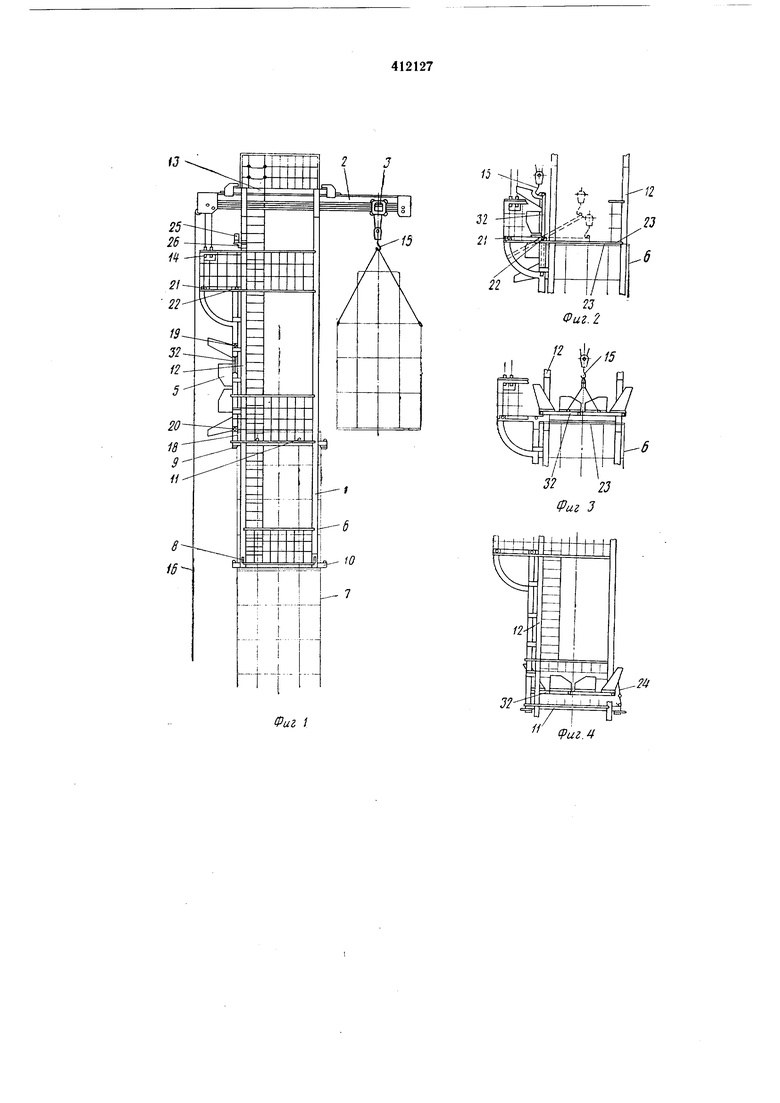
На ф:иг. 1 изображен предлагаемый кран на предпоследней секции сооружения; иа фиг. 2 и 3 - то же, при установке платформы с лебедками на О1оловок секции сооружения;
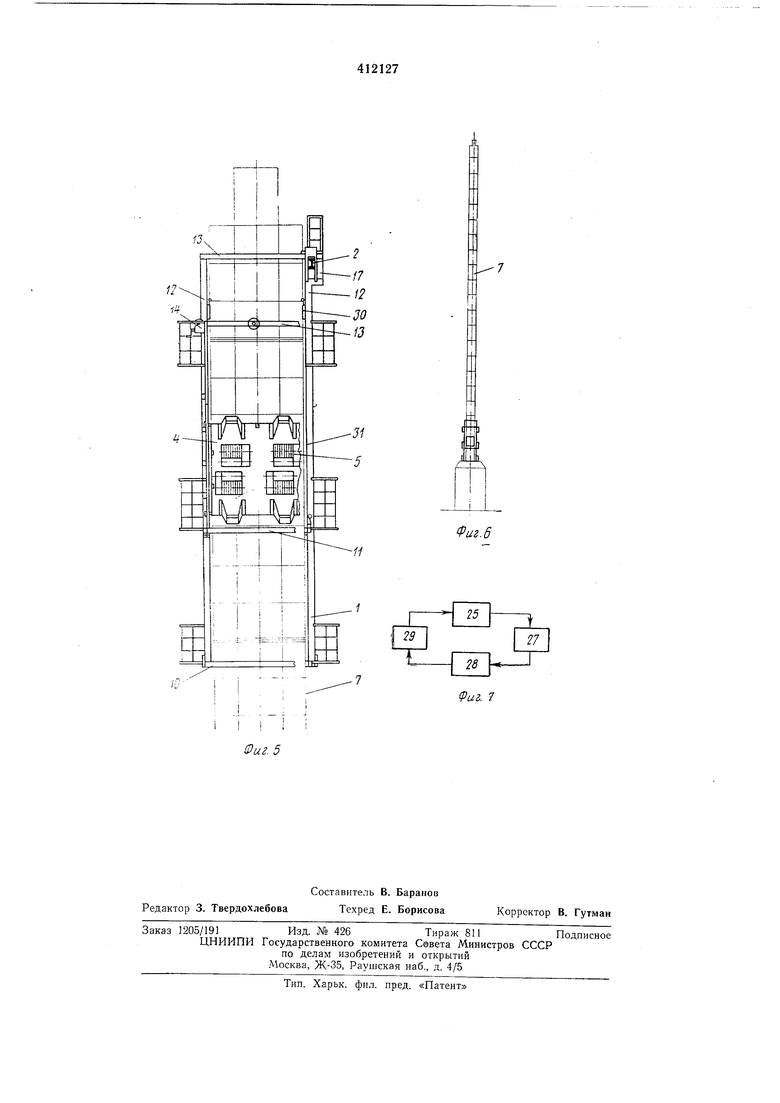
la фиг. 4 - то же, после передвпжеиня остова вдоль сооружеппя лебедками платформы; на ф|11г. 5 - то же, при опускаппп; па ф|н-. 6 - то же, после опускаипя; па ф1Н. 7 - структурная схема автоматического управления передвпжеиием остова крана в замкнутой систе.ме автоматического регулироваиия.
Крап содержит остов /, иесущпй консольную балку 2 с грузовоГ тележкой 3, п про0тнвовеспую платформу 4 с канатпымп лебедка.мн 5. Остов / вынолнеп с возможностью обхватывания и опираиия па возводимое из каркасных секций 6 сооружеиие 7. Иа сооружение 7 остов / оппраетея с помощью упоров
5 S и захватов 9, установлеиных соответственно в нижне.м 10 и среднем // /гоясах, связывающпх стойки 12 остова /. Кроме поясов 10 и // стойки 12 связаны верхним поясом 13. Под верхним поясо.м 13 расположепа балка 2, те0лежка 3 которой выполнена с возможностью перемещения внутри стоек 12 посредством лебедкн 14. Тележка 3 снабжена крюком 15, тяговая система 16 которого выполиепа управляемой с земли и крана. Балка 2 с тележкой
5 3 установлена на остове / с возможностью размещения в кармане /7 под верхннм поясом 13 на стойках 12. Две стойки 12, расположенные на нротивовесной стороне остова / крана, снабжены вертикальны.ми направляющими 18 для фиксаторов (щарппрпых опор) 19 20
протнвовесной платформы 4. Кроме того, вверху направляющие 18 имеют дополнительные фиксаторы 21 ,и 22. С помощью грузовой тележки 3 консольной балки 2 и фиксаторов 19-22 противовесная платформа 4 выполнена с возможностью подъема - опускания по направляющим 18, разворота и поперечного смещения относительно этих направляющих. Таким образом, с помощью тележки и фиксаторов платформа 4 переводится из вертикального положения на стойках 12 в горизонтальное полол ение на оголовках 23 каркасных секций 6.
iB горизонтальном положении платформы 4 па оголовках 23 лебедки 5 связаны со средним поясом 11 остова канатами 24. Регулирование хода лебедок 5 обеспечено наклонномерными датчиками 25, установленными поворотно на кронщтейнах 26, прикрепленных к остову.
С помощью кронщтейиов 26 каждый из датчиков 25 установлен параллельно соответствующей плоскости лебедок 5 и согласован с направлениями их результирующих действий. Датчики 25 выполнены с возможностью подключения непосредственно к органу 27 управления лебедками 5. Автоматическое регулирование хода канатов 24 лебедок 5 помимо используе.мых наклонных датчиков 25 и органа 27 управления осуществлено электрическими приводами 28. Совместно с объектом 29 регулирования, представленным остовом /, иаклонномерные датчики 25, орган 27 управления и электрические приводы 28 в автоматическом режиме регулирования хода канатов 24 лебедок 5 составляют систему автоматического регулирования.
Для опускания крана в низ сооружения 7 применены прикрепляемые с каркасными секциями 6 рычажные лебедки 30 с канатами 31, в свою очередь, зацепляемые за средний пояс ill остова 1. Проти.вовесяая платформа 4 смонтирована на раме 32.
Оеред подъемом и наращиваемым монтированием секций 6 сооружения 7 кран с закрепленной в вертикальном положении на направляющих 18 платформой 4 с рамой 32 устанавливают на отметке первой из монтируемых секций 6. Используя тележку 3 на балке 2, крюком 15 с тяговой системой 16 поднимают с земли первую из монтируемых секций 6 до уровня среднего пояса // и лебедкой 14 заводят первую из монтируемых секций 6 внутрь остова /. Затем опускают первую из монтируемых секций 6 межд} стойками 12 к поясу 10 я прикрепляют ее к низу сооружения 7. Не изменяя положения остова 1, поднимают крюком 15 вторую из монтируемых секций 6 и прикрепляют ее к первой.
После этого крюком 15 платформу 4 по направляющим 18 перемещают вверх до оголовка 23 второй из монтируемых секций 6. С помощью фиксаторов 21 и 22 переводят
платформу 4 из вертикального положения в горизонтальное. Перецепив крюк 15, платформу 4 устанавливают иа оголовке второй из монтируемых секций 6 с одинаковым расстоянием между стойками 12 и платформой 4. Зацепляют канаты 24 лебедок 5 за средний пояс остова / и отсоедиияют пояс 10 от низа сооружения 7.
Включают лебедки 5 в работу по равномерному беспереносному подтягиванию остова к платформе 4, установленной иа оголовке второй из монтируемых секций 6. Лри этом перекос остова 1 относительно секций 6 определяют наклоиномерными датчиками 25, которые с помощью кронштейнов 26 предварительно устанавливают параллельио соответствующим плоскостям спаренных лебедок 5 и согласовывают с направлениями результирующих действий их тяговых усилий.
В автоматическом режиме подъема остова / наклонномерные датчики 25 и электрические приводы 28 лебедок 5 переводят на работу в замкнутой системе автоматического регулирования хода канатов 24 лебедок 5. Наращивание сооружения 7 следующими секциями 6 производят аналогично описаниому подъему и монтированию секций 6. Отличие состоит лйщь в том, что включение лебедок 5 в работу по подтягиванию остова / к устанавливаемой на оголовках секций 6 платформе 4 производят после освобождения сооружеиия 7 от упоров 8 и захватов 9, с помощью которых кран опирается на сооружение 7. Для опускания крана в низ сооружеиия 7 балку 2 с грузовой тележкой 3 размещают в кармане 17 под верхним поясом 13 иа стойках 12, а остов J канатами 31 рычажных лебедок 30 подвещивают к сооружению 7. Окончательный демонтаж крана производят в низу сооружения 7. Кран можио опускать подвещиванием остова ,/ канатами 24 к лебедкам 5. При этом электрические приводы 28 лебедок 5 могут быть включены аналогично описанному на автоматическую работу регулирования хода каиатов 24.
Предмет изобретения
Кран для возведения вертикальных сооружений преимущественно с секционированным каркасом, содержащий охватывающий сооружение остов, .несущий консольную балку с грузовой тележкой, и противовесную платформу с канатными лебедками, отличающийся тем, что, с целью упрощения перестановки крана по высоте сооружения, остов снабжен вертикальными направляющими для щарнирных опор ра.мы противовесной платформы,
последняя выполнена с возможностью подъема и опускания по указаииым направляющим, разворота и поперечного смещения с помощью грузовой тележки консольной балки.
13
Фиг i
Фиг 3
32
сриг.4
Фиг. 6
Фиг,- 7
| название | год | авторы | номер документа |
|---|---|---|---|
| БАШЕННЫЙ КРАН | 1971 |
|
SU289716A1 |
| Консольный кран для монтажа пролетных строений мостов | 1974 |
|
SU536116A1 |
| Башенный кран | 1984 |
|
SU1248942A1 |
| Способ монтажа моста-эстакады железнодорожного ИМЖ-500 сборно-разборным железнодорожным консольным краном для установки опоры и пролётного строения за один технологический цикл | 2020 |
|
RU2740595C1 |
| СБОРНО-РАЗБОРНЫЙ КОНСОЛЬНЫЙ КРАН | 2021 |
|
RU2774693C1 |
| БАШЕННЫЙ КРАН | 2006 |
|
RU2307783C1 |
| Кран | 1990 |
|
SU1744047A1 |
| Кран-манипулятор для монтажа зданий из сборного железобетона | 1984 |
|
SU1203011A1 |
| ДВУХСТРЕЛОВОЙ КРАН НА КОЛОННАХ ДЛЯ МОНТАЖА ИЗ СБОРНЫХ СТРОИТЕЛЬНЫХ ЭЛЕМЕНТОВ СООРУЖЕНИЙ | 1966 |
|
SU178461A1 |
| Шлюзовой кран для установки пролетных строений автодорожных мостов и путепроводов | 1983 |
|
SU1133224A1 |