1
Изобретение относится к безрельсовым транспортным OpeACTBaM, в частности к шагающИМ движителям.
Известны шатающие движители транспортных средств, состоящие .из -корпуса, щагающих onoip и пр-иВОдов к ним, обеспечивающих передвижение опор относительно корпуса по плоской эамкнутой траектории.
Недостатко.м таких движителей является их небольшая устойчивость и визка-я проходимость по лересеченной местности.
Цель изобретения - увеличение устойчивости шагающего транспортного средства и увеличение его проходимости дорог, имеющих местные препятствия.
Это достигается тем, что привод каждой опоры Предлагаемого движителя выполнен в виде кр-ивошипно-кулиснаго .механизма с шарни1рно укрепленным ва корлусе ползуном, кулиса которого своим свободным концом связана с опорой через промежуточную площадку, установленную на корлусе посредством двойного шарнирного параллелограмма, обеспечивающего возможность плоскопараллельного пере.мешения ее относительно корпуса, причем на площадке установлены приводы для перемещения оеоры по трем взаимно лерпенДикулярным направлениЯМ. Длина кулисы в 4,7 раза больше радиуса кривошила, а шарнир лолзуиа установлен иа расстоянии 1,3 радиуса кривошипа ве|ртикально вверх от оси его вращения.
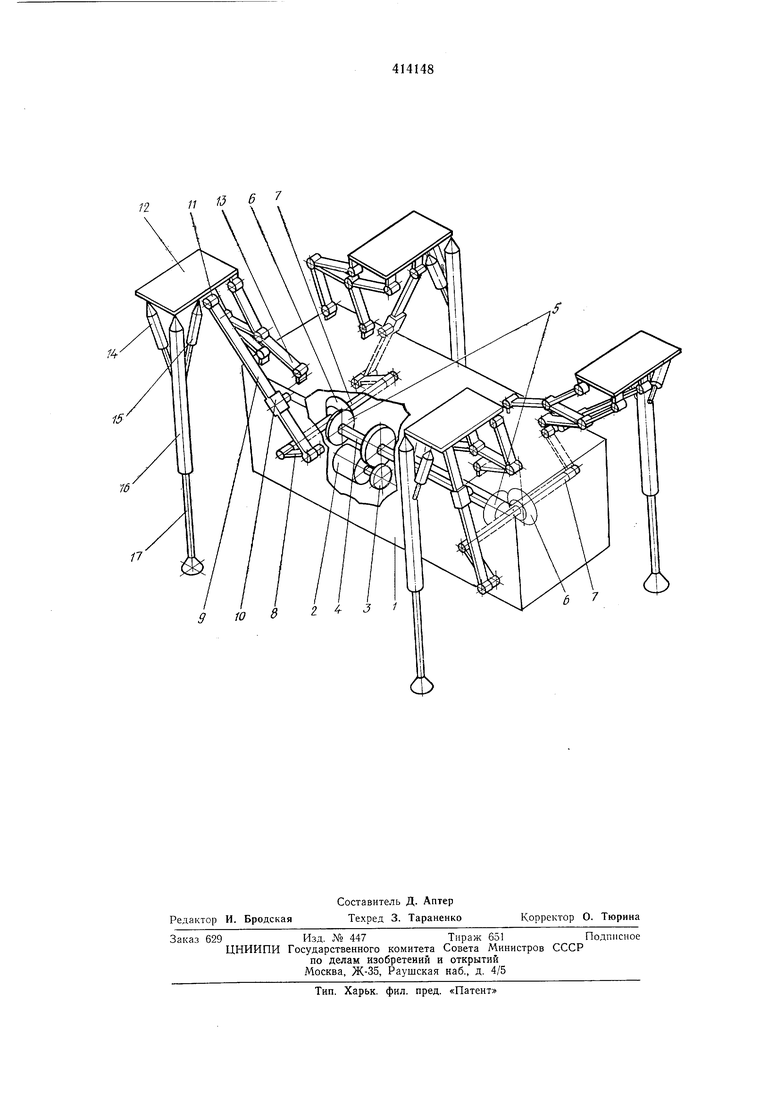
На чертеже изображен щагающий движитель траиспортного средства. О.н состоит из KOpiHyca /, на которо.м раамещены двигатель.2 с редуктором 3, соединенным с продольным валом 4, на ко.нцах которого установлены конические шестер П 5, солряженные с коническими шестерлями 6, вращающими лопереч0ные валы 7. Поперечные валы на своих концах имеют кривошипы 8, связанные цилиндрическими щарнирами с кулисами 9, скользящими по лолзунам 10, установленным шарнирно на корпусе /.
Длина каждо кулисы 9 выбрала равной 4,7 радиуса кривошипа 8, а ползун 10 размещен на расстоянии 1,3 радиуса кривошипа 8 вертикально вверх от оси его вращения. Это позволяет формировать такую замкнутую тра0екторию свободного конца // кулисы 9, которая имеет прямолинейный участок на своей нижней части.
Конические шестер.ни 5 и 5 выбраны с равным числом зубьев, а кр-ивошилы 8 жестко закреплены па концах параллельных между собой лолеречных валов 7 так, что кривошипы 8 одного вала 7 развернуты под углом 180° один к другому, а валы 7 присоединены
0 .к продольному валу 4 так, что передний по
ходу движения по:перечный вал 7 отстает по фазе от заднего .на угол 90.
Каждая кулиса 9 своим свободным концом 11 шарнирно прикреплена к промежуточной площадке 12, установленной на корпусе 1 посредством двойного mapHHipHoro .параллелограмма 13, обеспечивающего плоскопа раллельное нередвнженйе ллощадки 12 относительно KOipnyca /. На площадке установлены лрщ.воды продольного 14, нолеречного 15 н вертикального 16 перемещения шагающей опоры 17.
Шагающий движитель работает следующим образОМ.
Электродвигатель 2 через редуктор 3 вращает продольный вал 4, вращение которого через конические шестерни 5 н 6 передается поперечным валам 7 и установленным на его концах кр,ивошилам 8. Свободный конец ,// кулисы, благодар Я выбранлым соотношениям между длиной кр.ивошипа .8, длиной кулись1 9 и местом установки нолзуна 10, перемещается по конхоиде, имеющей в своей нижней части прямолинейный участок.
ПромежутОЧная площадка 12, благодаря двойному шарнирному параллелограмму 13, может леремещаться относительно корлуса только плосколараллельно, ноэтодау укрепленная к ней шагающая олора /7 перемещается ло той же траектор-ил, что и свободный конец кулисы 11. Нижяий прямолинейный участок конхоиды используется для упирания олоры 17 о поверхность до.роги, на криволинейно же участке конхоиды олора 17 переносится на новое место. Благодаря олисанной установке кривошипов 5 на валах 7 и валов 7 относительно друг друга, обеспечивается поочередный леренос опор в такой последовательности, которая лридает статическую устойчивость транспортному средству.
Коррекция траектории движения шатающей опоры 17 лри перешагивании через препятствия, преодолении уклонов и подъемов дороги и лри повороте . осуществляется лосредством приводов 14, 15 и 16, которые обеспечивают достаточную устойчивость транснортного средства в этИХ условиях. Приводы отклонения олор по тре.м взаимно перлендикулярны.м налравлениЯМ работают независимо от нривода
шагающих опор, а конструкция привода онор в виде крнвошилно-кулиснаго конхоидного механизма обеснечивает движение тралспортного средства без колебания его центра тяжести. Все это обусловливает высокую устойчивость
и низкую эиерголотребляемость лредлагаемого тралснортного средства.
Предмет изобретения
1. Шагающий движитель транспортного
средства, содернсащий опоры и лриводы к ним для лередвижения опор по ллоской замкнутой тр.аектор|Ии относительно корлуса, отличающийся те.м, что, с целью увеличения его устойчивостн и проходи.мости, привод каждой олоры выполнен в виде кривош нлио-кулисного механизма с шарнирно укренленлым на корпусе лолзуном, кулиса котор01го своим свободным концом связана с олорой через промежуточную площадку, установленную на корпусе посредством двойпого шарнирного параллелограмма, обеспечивающего возможность нлосколараллельного перемещения ее относительно корпуса, причем на площадке установлены
лриводы для перемещения опоры но трем взаимно перпендикулярным направлениям.
2. Движитель по л. 1, отличающийся тем, что длина кулисы в 4,7 раза больше радиуса кривошипа, а шарнир ползуна установлен на
расстоянии 1,3 радиуса кривошила вертикально вверх от оси его вращения. 15 б 7 /21 8 г 3 9 10 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающий движитель | 1972 |
|
SU438573A1 |
| Шагающее транспортное средство | 1976 |
|
SU569474A1 |
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2009938C1 |
| МНОГООПОРНАЯ ШАГАЮЩАЯ МАШИНА | 2003 |
|
RU2258624C2 |
| Колесно-шагающий движитель транспортного средства | 1975 |
|
SU596496A1 |
| МЕХАНИЗМ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ОБЪЕКТА | 1989 |
|
RU2019462C1 |
| Шагающий движитель транспортного средства | 1990 |
|
SU1776602A1 |
| Механизм петлителя швейной машины | 1974 |
|
SU548675A1 |
| Кривошипно-ползунный направляющий механизм для ноги шагающего движителя | 1990 |
|
SU1751038A1 |
| ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2010 |
|
RU2452646C2 |