изменения угловой скорости колеса, причем привод вращения колеса выполиен в виде карданной передачи, связанной с приводным двигателем, расположенным в корпусе транспортного средства 3.
В этом движителе в режиме шагания происходи автоматическое изменение угловой скорости колеса соответственно скорости шагания, благодаря имеюш,емуся механизму изменения угловой скорости колеса (механизма сумматора), выполненному в виде пары с внутренним зацеплением, установленной в рычаге шагания.
Однако применение кардана равных угловых скоростей в приводе вращения колеса существенно ограничивает реализацию потенциальных возможностей колесно-щагающего движителя, поскольку ограничивает возвратнопоступательное перемещение колеса и тем самым возможное повышение тягово-сцепных характеристик. Это также ограничивает компоновочные возможности при создании транспортного средства с подобным движителем.
Цель изобретения - повыщение . тяговосцепных характеристик.
Это достигается тем, что привод вращения колеса выполнен индивидуальным, его корпус поворотно установлен на конце рычага щагания, а механизм изменения угловой скорости колеса выполнен в виде механической передачи, кинематически связывающей привод вран1ения колеса с рамой транспортного средства.
Механическая передача выполнена в виде двухступенчатого цепного привода, первая звездочка которого установлена соосно торсионному валику и жестко связана с рамой, вторая двухвенцовая звездочка щарнирно установлена на оси соединяющей верхний рычаг с рычагом щагания, а третья звездо- ка присоединена к корпусу привода вращения; выходной вал которого соединен со ступицей ходового колеса.
Эта схема привода улучшает компоновочные возможности движителя, позволяя более рационально разместить его на транспортном средстве, по сравнению с известными. Кроме того, отсутствие карданной передачи для привода вращения колес позволяет при тех же габаритах движителя увеличить длину шага движителя и тем самым повысить тягово-сцепные характеристики.
Механическая передача также может быть выполнена в виде двух шкивов, связанных закрепленным на них охватывающим тросом, причем один щкив присоединен к корпусу привода вращения, а второй установлен шарнирно на оси, соединяющей верхний горизонтальный рычаг с рычагом щагания, и связан щарнирно закрепленной по концам щтангой с рамой транспортного средства.
Механическая передача может быть выполнена в виде жестко укрепленного на рычаге щагания зубчатого редуктора, один вал которого соединен с приводом вращения колеса, а второй - системой рычагов соединен с рамой транспортного средства.
Колесно-шагающий движитель может быть выполнен также в варианте, когда корпус привода вращения жестко связан со ступицей колеса, а выходной вал этого привода механической передачей связан с рамой транспортного средства. Кроме того, передаточное отношение механической передачи равно отношению длины рычага щагания к радиусу ходового колеса плюс единица.
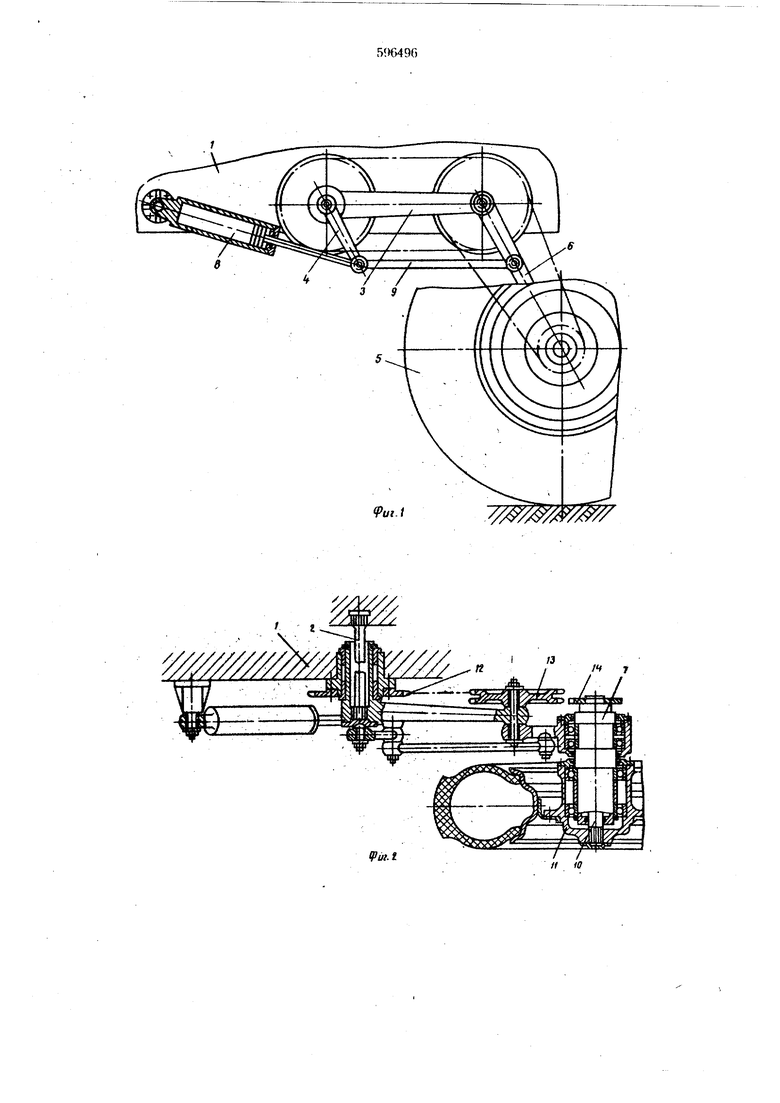
На фиг. 1 изображен колесно-щагающий движитель, вид сбоку; на фиг. 2 - то же, вид в плане; на фиг. 3 - вариант выполнения колесно-шагающего движителя, в котором механическая передача выполнена в виде цепной передачи, вид сбоку; на фиг. 5 - кинематическая схема варианта выполнения колесно-щагающего движителя с механической передачей, выполненной в виде жестко укрепленного на рычаге Ц1агания зубчатого редуктора, вид сбоку; на
фиг. 6 - то же, вид в плане; на фиг. 7 - вариант колесно-щагающего движителя, у которогокорпус привода вращения жестко связансо ступицей колеса, а выходной вал привода вращения посредством цепной передачи связан с рамой транспортного средства..
Колесно-щагающий движитель имеет следующее устройство.
Эластичная подвеска в виде шарнирного параллелограмма присоединена к раме 1 транспортного средства при помощи горизонтального торсионного валика 2, жестко связанного с
верхним горизонтальным рычагом 3 параллелограмма в месте его соединения с вертикальным рычагом 4. Ходовое колесо 5, установленное на конце рычага 6 щагания, содержит внутри привод 7 вращения. Рычаг 6 шагания
связан с приводом 8 шагания с помощью нижнего рычага 9 щарнирного параллелограмма. Механизм изменения угловой скорости колеса выполнен в виде механической передачи, связывающий корпус привода 7 вращения с рамой 1, причем корпус привода вращения установлен
поворотно на конце рычага 6 щагания и выходной вал 10 его редуктора жестко связан со ступицей 11 колеса 5. Механическая передача выполнена в виде двухступенчатого цепного привода, первая звездочка 12 которого установлена соосно валику 2 и жестко связана с рамой 1, вторая - двухвенцовая звездочка 13 - щарнирно установлена на оси, связывающей верхний рычаг 3 с рычагом щагания 6, а третья звездочка 14 жестко соединена с корпусом привода вращения 7.
Устройство работает следующим образом. В колесном режиме движения привод шагания 8 блокируется и включается привод вращения колеса 5. При этом движитель работает как обычный колесный.
В слбжных дорожных условиях осуществляется переход на колесно-щагающий режим путем дополнительного включения привода 8 щагания. При этом рычаг 6 щагания соверщает качательные движения, а колесо 5 возвратно-поступательные перемещения относительно
корпуса транспортного средства и при постоянной скорости привода вращения колеса перемещается по опорной поверхности с переменной скоростью вследствие изменения скорости вращения звездочки 14. В том случае, когда колесо 5 относительно кор-пуса перемещается вперед,
его угловая скорость увеличивается, а когда оно движется назад - уменьшается, причем для того, чтобы колесо перемещалось по опорной поверхности без юза и буксования передаточное отношение механизма изменения угловой скорости вращения колеса 5, т. е. передаточное отношение между звездочками 13 и 14, должно быть равно отношению длины рычага
6шагания к радиусу колеса 5 плюс единица.
В варианте колесно-шагающего движителя (фиг. 3 и 4) механическая передача, связывающая привод вращения с рамой 1 транспортного средства, выполнена в виде двух щкивов 15 и 16, связанных закрепленным на них с помощью зажимов 17: и 18 охватывающим тросом 19, .причем шкив 16 присоединен к корпусу привода
7вращения, а шкив 15 установлен шарнирно на оси, соединяющей рычаг 3 с рычагом 6 шагания и связан шарнирно закрепленной по концам штангой 20 с рамой 1. Передаточное отношение между шкивами 15 и 16 равно отношению длины рычага шагания к радиусу колеса 5 плюс единица. Движитель работает аналогично описанном) выше.
В третьем варианте колесно-шагаюшего движителя (фиг. 5 и 6) механическая передача, кинематически связывающая привод вращения колеса с рамой транспортного средства, выполнена в виде жестко укрепленного на рычаге 6 щагания редуктора 21, вал 22 которого соединен с корпусом привода 7 вращения колеса 5, а вал 23 - системой рычагов 24-26 и штангой 20 соединен с рамой 1 транспортного средства. Причем, передаточное отношение редуктора 21 равно отношению длины рычага 6 шагания к радиусу колеса 5 плюс единица.
В колесном режиме движения движитель работает аналогично Ьписанным выше вариантам. В колесно-шагающем режиме движения включается дополнительно привод 8 шагания, который сообщает рычагу 6 щагания возвратно-качательные перемеьцения. При этом зубчатое колесо 27 связанр через вал 23 рычагами 24--26 и штангой 20 с -рамой 1 может совершлт,ь относительно рамы лишь плоско-параллельные перемещения и при повороте в процессе шагания рычага 6 щагания, являющегося совместно с корпусом редуктора - водилом, шестерня 28, связанная посредством вала 22 с корпусом привода 7 вращения сообщает последнему, а следовательно и колесу 5 дополнительную угловую скорость.
В варианте исполнения предлагачгмого колесно-шагающего движителя (фиг. 7) корпус привода 7 вращения жестко связан со ступицей 11 колеса 5, а вал 10 посредством цепной передачи (звездочки 12-14) связан с рамой 1 транспортного средства.
Применение изобретения позволит упростить конструкцию колесно-111агаюш.их движителей и значительно увеличить их тягово-сцепные характеристики.
Формула изобретения
1. Колесно-щагающий дзижнтель транспортного средства, содержаи.-ий эластичную
6
подвеску в виде шарнирного параллелограмма, присоединенного к раме транспортного средства при помощи горизонтального торсионного валика, жестко связанного с верхним горизонтальным рычагом параллелограмма в месте его соединения с одним из вертикальных рычагов, ходовое колесо, установленное на конце рычага шагания, второго вертикального рычага параллелограмма, связанного с приводом шагания, расположенный в корпусе привод вращения колеса и механизм изменения угловой скорости колеса, отличающийся тем, что, с целью повышения тягово-сцепных характеристик, привод вращения колеса выполнен индивидуальным, его корпус поворотно установлен на конце рычага щагания, а механизм изменения угловой скорости колеса выполнен в виде механической передачи, кине.матически связывающей привод вращения колеса с рамой транспортного средства.
2.Движитель по п. 1, отличающийся тем, что механическая передача выполнена в виде двухступенчатого цепного привода, первая звездочка которого установлена соосно торсионному валику и жестко связана с рамой, вторая-двухвенцовая звездочка шарнирно установлена на оси, соединяющей верхний рычаг с
рычагом шагания, третья звездочка присоединена к корпусу привода вращения и выходной вал привода соединен со ступицей колеса.
3.Движитель но п. 1, отличающийся тем, что .механическая передача выполнена в виде двух шкивов, связанных закрепленным на них охватывающим тросом, причем один шкив присоединен к корпусу привода вращения, а второй установлен шарнирно на оси, соединяю-, щей верхний горизонтальный рычаг с рыча-.. гом шагания, и связан шарнирно закрепленной по концам штангой с рамой транспортного средства.
4.Движитель по п. 1, отличающийся тем, что механическая передача выполнена в виде жестко укрепленного ка рычаге шагания зубчатого редуктора, один вал которого соединен с
приводом вращения колеса, а второй - системой рычагов соединен с ракой транспортного средства.
5.Движитель по п. и отличающийся тем, что корпус привода вра дения жестко связан со ступицей колеса, а зыходчой вал механической передачей связан с рамой транспортного средства.
6.Движитель по iin. 1-5, отличающийся тем, что передаточное отношение механической передачи равно отношению длины рычага ша0 гания к радиусу ходового колеса плюс единица.
Источники информации, принятые во внимание при экспептизе:
. Патент США .№ 3842926, кл. 180-8, 1974.
2. Беккер М. Г. Введение в теорию систем местность - машина. М., «Машиностроение, 1973, с. .304-306.
3. Авторское свидетельство СССР № 485899, кл. В 62 D 57/02, 1972. /
| название | год | авторы | номер документа |
|---|---|---|---|
| Колесно-шагающий движитель транспортного средства | 1981 |
|
SU1000336A1 |
| Транспортное средство | 1979 |
|
SU880853A1 |
| Колесно-шагающий движитель | 1975 |
|
SU552232A1 |
| Колесно-шагающий движитель | 1980 |
|
SU908646A1 |
| Транспортное средство с колесно- шагающими движителями | 1978 |
|
SU725941A1 |
| Колесно-шагающий движитель | 1975 |
|
SU534386A1 |
| Колесно-шагающий движитель транспортного средства | 1982 |
|
SU1110708A1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| Колесно-шагающий движитель | 1979 |
|
SU816855A1 |
| Колесно-шагающий движитель | 1976 |
|
SU650877A1 |


У////////////. РщЛ
