1
Изобретение от шсится к шагающим движителям, в частности к маломощным автоматическим устройствам для перемед1ения исследовательских аппаратов.
Известен шагающий движитель, срстоя- 5 щий из к орпуба, соединенного с помощью ко Л8 1чатьгх валов с опорными; , расположенными по обеим сторонам корпуса, и мехаг низма поворота, включающего :систему Кат-i., ков, установленных в направляющих лыж, и IQ толкателей, приводим в движение гидро- цилиндрами ij .
Недостатком движителя является наличие сложного и громоздкого механизма i5 поворота..Известен также шагающий движитель, состоящий из двух боковых опор, связанных, с корпусом при помош.и кривошипов, в которых, поворот осуществляется за счет рази она прав. 20 ленного вращения кривошипов бортов f2 . Однако такой движитель не имеет устройства синхронизации движения .опор. При неодинаковой нагрузке на правую и левую опоры происходит рассогласование фаз ;.двнженид 25
опор, что приводит к нарушению заданного направления движения.
Наиболее близким к изобретению по технической сущности и дости1 аемому результату является шагающее |транспо ртиое средство, содержащее центральный корпус и две боковые опоры, устаг эвлеиные на корпусе с по мощью кривошипов, валы которых расположены на одной высоте, связаны между собой синхронизирующим механизмом и каждый из них соединен с индивидуальным электро-
приводом з .
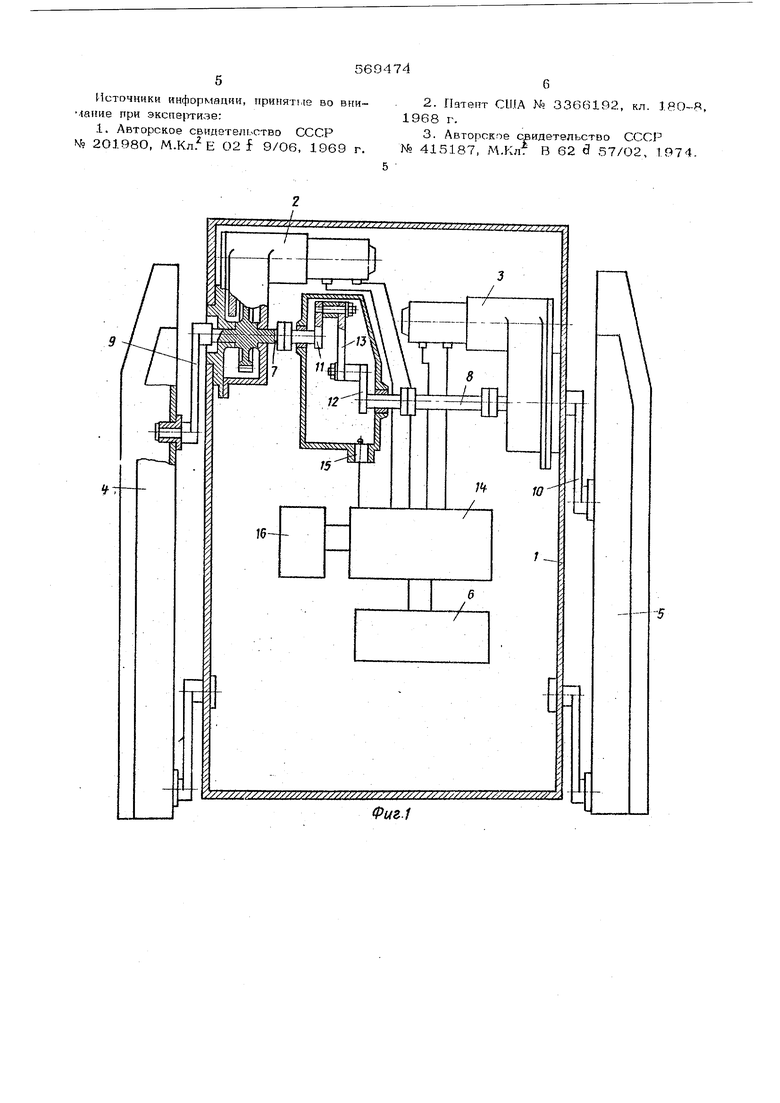
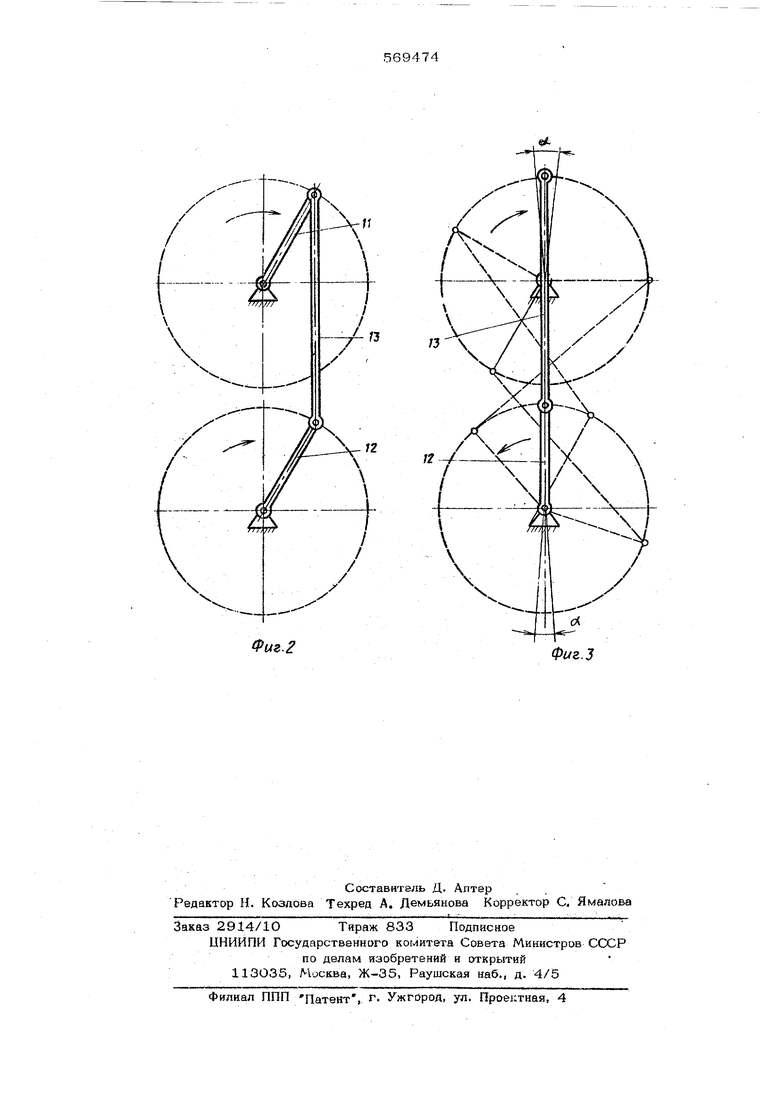
Недостатками этогошагающего транспортного средства является то, что механизм синхронизации- движения, опор-содержит большое количество электрических управЛяющих элементов, что уменьшает надежн-эсть работы синхронизации; один из электродвигателей работает в режиме частых пусков, что значительно уменьшает надежность и долговечность работы электродвигателей; в двигателе отсутствует силовая связь между электр011риводами бортов, в результате чего в процессе передвижения могут возникать перегрузки одного электропривода при недогрузке другого. Целью изобретения является увеличение надежности устройства. Это достигается тем, что валы кривош№ . пов разньгк боковых опор установлены не соосно, а синхронизируюгций механизм содержит два кривошипа одинаковой длины, ус та.новленные на валах, и шатун, соядиняющий нх свободные концы, причем длина ша;туна равна эксцентриситету валов,На фиг. 1 показан общий вид шагающего транспортного средства в плане; на фиг. и 3 - схемы работы механизма синхронизации движения опор. Шагйющее транспортное средство содержит центральную опору-корпус 1, на котором установлены правый 2 и левый 3 электромеханические приводы, связанные с соответ ствующими боковыми опорамй;4 и 5, На корпусе 1 установлен . также блок питания 6 электроприводов 2 и 3. На выходных валах 7 и 8 электроприводов 2 и 3 установлены кривошипы 9 и lOnpp. Кроме того, валы 7 и 8 связаны с лшсооснь установлен.ными шарнирно в корпусе дополнительными кривошииамн 11 и 12. Свободные ко1шы кр вошипов 11 и 12 шартфно связаны шатуиом 13, Кривошипы 11 и 12 выполнены равной длины, а длина шатуна 13 равна ;. расстоянию между осями вращения выходных валов 7 и 8 в корпусе 1. Управление электромеханическпми приводами 2 и 3 осу ществляется через блок управления 14, сое диненный с датчиком 15 положения кривошипа 12. управления 16 служит для задания направления движения. - Устройство работает следующим образом. ftpH прямолинейном движении электромеханические приводы 2 и 3 обеспечивают ;ДВижеяие боковых опор 4 и 5 относительно корпуса 1. Прямолинейное движение машины осуществляется периодическим опиранием на грунт опор 4 я 5 и одновременным j выносом вперед в этот момент корпуса 1. При последующем опирании,корпуса 1 на грунт впаред выносятся опоры 4 и 5. Механизм сишсронизадии, включающий кр вошипы 11 и 12 и шатун 13, представляет собой шарнирный параглелограмм и обеспечивает жесткую кинематическую связь межд приводами 2 и 3 бортов. Этим обеспечивает ся надежная синхронизация за весь никл. Два раза за оборот валов 7 и 8 параллелограмм достигает предельного положения, т.е. кривошипы 11, 12 и шатун 13 располагаются на одной линии. В этот момент параллелограмм обладает неопределенностыб 2,вижения звеньев и имеет возможность при реверсе одного из электроприводов обратиться в антипараллелограмм. Это его свойство и использовано для обеспечения возможности поворота шагающего движителя. Таким образом, поворот машины возможен только с момента достижения параллелограммом одного из предельных положений. В этот момент от датчика 15 (на фиг 1 показан датчик положения кривошипа 12 то. в одном предельном положении последнего) положения кривошипа 12 поступает на блок управления 14 сигнал о достижении параллелограммом предельного положения. В этом случае, если с пульта управления 16 на блок управления 14 уже подана команда на поворот машины, то один из электромеханических приводов, в зависимости от направления поворота машины, включается в направлении, обратном направлению вращения второго. При этом параллелограмм преобразуется ч антипараллелограмм, который также обеспечивает жесткую кинематическую связь боковых опор машины. Если с пульта управления 16 команда об изменении .направлений движения не поступает, то машина со.хра- няет первоначальное заданное направление движения. Изменение направления движения : машины на обратное может быть осуществлено при любом положении кривошкпов 11, 12 и шатуна 13 параллелограмма при одновременном реверсе обоих пр :водов 2 и 3. Предельное положение, в котором возможен реверс приводов, определяется углом ct (см. фиг. 3), величина которого зависит от кинематической точности изготовления элементов параллелограмма. Наличие рычажного механизма синхронизации, обеспечивающего жесткую кинематическую связь боковых опор машины и их син.хронную работу, позволяет значительно увеличить надежность работы движителя. Формула изобретения Шагающее транспортное средство, содержащее центральный опорный корпус и две боковые опоры, установленные на корпусе с помощью кривошипов, валы которых расположены на одной высоте, связаны между собой синхронизирующим механизмом и каждый из них соединен с индивидуальным электропри- водом, отличающееся тем, что, с целью увеличения надежности, валы кривошипов разных боковых опор j установлены иесоосно, а синхронизирующий механизм содержит два кривошипа одинаковой ддины, установленные на вглах,- и щатун, соединяюшкй их свободные кошш, причем длина щатуна равна эксцентриситету валов. Источники информации, принятие во вничаиие при экспертизе: 1. Авторское свидетельство СССР 2О1980, М.Кл.Е О2 f 9/06, 1969 г. 2.Патент США № 3366192, кл. 180-8, 1968 г. 3.Авторское свидетельство СССР № 415187, А1.Кл. В 62 в 57/О2, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающее транспортное средство | 1974 |
|
SU527332A1 |
| МНОГООПОРНАЯ ШАГАЮЩАЯ МАШИНА | 2003 |
|
RU2258624C2 |
| Шагающее транспортное средство | 1976 |
|
SU810545A1 |
| Движитель транспортного средства | 1972 |
|
SU485899A1 |
| ШАРНИРНЫЙ КРИВОШИПНЫЙ МЕХАНИЗМ | 2020 |
|
RU2740526C1 |
| МОСТОВОЙ ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 2011 |
|
RU2501703C2 |
| Колесно-шагающий движитель транспортного средства | 2024 |
|
RU2824228C1 |
| ШАГАЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2801819C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2422317C1 |
| Движитель, шагающий колесными опорами | 2020 |
|
RU2763058C1 |
/
/
Фиг.2
,2 -/-Фиг.З
