1
Известны устройства для управления рабочим органом, преимущественно для стреловых передвижных кранов, содержащие шарнирно сочлененную параллелограммную укоспну, удерживаемую жесткой тягой, гусек которой несет рабочий орган и связан со стрелой укосины силовым цилиндром.
Целью изобретения является обеспечение постоянной скорости вертикального перемещения рабочего органа.
Это достигается тем, что рабочий орган предлагаемого устройства выполнен с вертикальными направляющими для хвостовика тяги укосины, связанного с штоком следящего золотника силового цилиндра, и с приводом для перемещения с постояпной скоростью корпуса следящего золотпика.
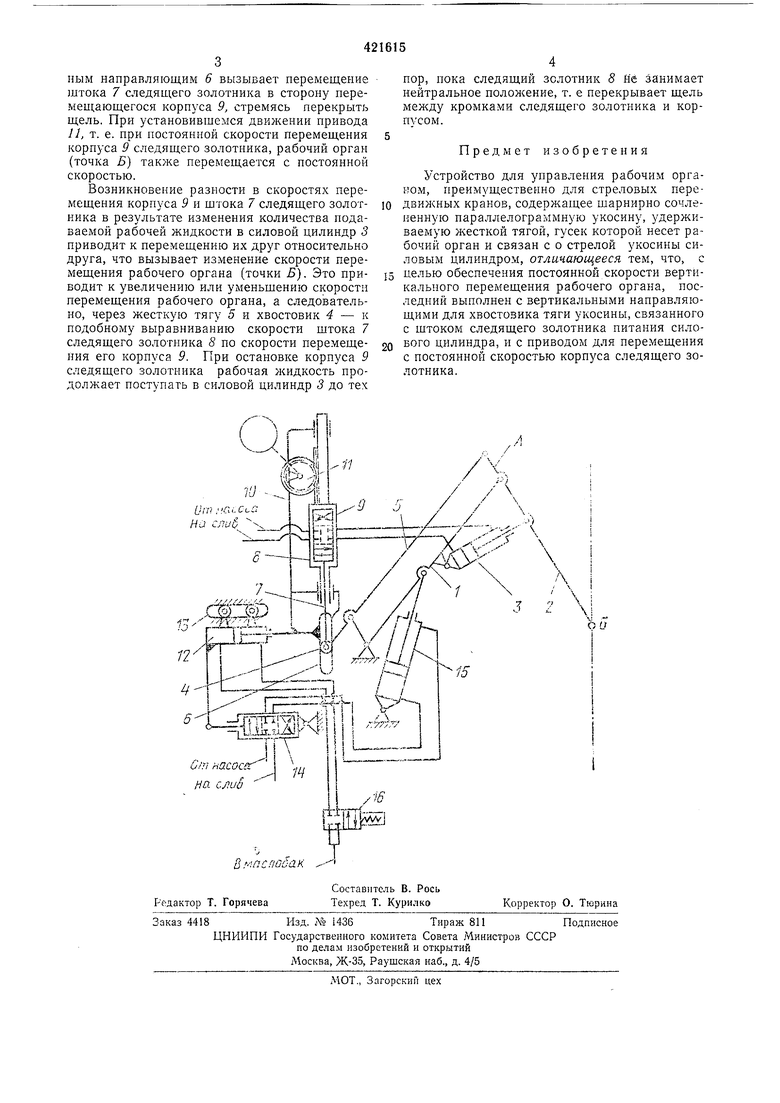
На чертеже показана схема описываемого устройства. Стрела / шарнирно сочлененной параллелограммпой укосипы А связана с гуськом 2 рабочего органа силовым цнлиндро.м ,;.
Хвостовик 4 жесткой тяги 5 укосины, сочлененный с гуськом 2, расположен в вертикал ных направляющих б и связан с штоком 7 следящего золотника 8 силового пилиндра 3. Корпус 9 следящего золотника 8 установлен с возможностью перемещения на каретке W, жестко соединенной с вертикальными направляющими 6 посредством привода //. Привод // корпуса 9 следящего золотника 8, вьшолненшоп.
например, в виде зубчато-реечной передачи, связанной с реверсивным электродвигателем постояииого тока, задает постоянную скорость движения корпусу 9.
Направляющие 6 связаны цплиндром 12 управления, корпус которого установлен с возможностью перемещения в направляющих 13 и шарнирно соединен со следящим золотником 14 силового цилппдра 15 стрелы / укосины.
Команда на цилиндр управления осуществляется двухпозпционным краном 16.
При работе стреловым краном включают привод 11, и корпус -9 следящего золотника 8 перемещается в направляющих каретки 10,
а шток 7 следящего золотника S еще находится в состоянии покоя. Между корпусом 9 п золотником 8 образуется щель, п рабочая жидкости поступает в одну из полостей силового цилиндра 3, что вызывает перемещение гуська п через жесткую тягу 5 - хвостовика 4.
Отклонение хвостовика 4 от заданной траектори, например вертикали, передается через вертикальную направляющую 6 п цилиндр управления, образу1ош,пй я есткое звено прп
перекрытии двухпозицпонного крапа 16 на следящий золотник 14. Следящий золтоннк 14 управляет силовым цилиндром /5, корректирующим направлеппе перемещения рабочего органа по заданной траекторпи.
Перемещенпе хвостовпка 4 по вертпкаль
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ РАБОЧЕГО ОРГАНА СТРЕЛОВОГО КРАНА | 1971 |
|
SU293756A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ СТРОИТЕЛЬНО-ДОРОЖНЫХ МАШИН | 1969 |
|
SU253671A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНАВСЕСОЮЗНАЯnATEHTHO-TEXH^^iECri^r | 1970 |
|
SU282800A1 |
| ШАРНИРНО СОЧЛЕНЕННАЯ УКОСИНА ПОРТАЛЬНОГО КРАНА | 1971 |
|
SU311854A1 |
| УСТРОЙСТВО для КООРДИНАЦИИ ДВИЖЕНИЯ ДВУХЗВЕННОЙ СТРЕЛЫ ГИДРАВЛИЧЕСКОГО КРАНА | 1970 |
|
SU261674A1 |
| ШАРНИРНО-СОЧЛЕНЕННАЯ УКОСИНА | 1973 |
|
SU387920A1 |
| БЕТОНОУКЛАДЧИК ДЛЯ УКЛАДКИ БЕТОННЫХ ПОЛОС ПОЛОВ И ДОРОГ | 1972 |
|
SU344063A1 |
| СТРЕЛОВОЙ КРАН | 1971 |
|
SU296705A1 |
| МАШИНА ДЛЯ ПОДРЕЗКИ КРОН ДЕРЕВЬЕВ | 1968 |
|
SU210545A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УРАВНОВЕШИВАНИЯ ГИДРАВЛИЧЕСКОГО СТРЕЛОВОГО КРАНА | 1966 |
|
SU178073A1 |
