Олисываемое изобретение относится к устройствам для управления перемещением рабочего органа по заданной траектории, применяемых для строительно-дорожных машин, а также металлургических машин, машин свяванных с механизацией сельскохозяйственных работ, транспортно-погрузочных работ, работ по уходу за лесом и других.
Известно устройство для управления рабочим органом строительно-дорожных машин, содержащее следящий золотник, силовые цилиндры, направляющую с роликом и пантогра ф. Такое устройство обеспечивает перемещение рабочего органа по прямолинейной горизонтальной траектории с изменением расположения траектории движения только по высоте.
Целью Настоящего изобретения является обеспечение перемещения рабочего органа по заданной криволинейной траектории.
Достигается это тем, что устройство выполнено с приводной шестерней, на которой установлена с возможностью перемещения посредством поворотного механизма направляющая с роликом. Кроме того, поворотный механизм выполнен в виде шарнирно соединенного со следящим золотником силового цилиндра, щток которого жестко связан с направляющей, а корпус установлен с возможностью продольного перемещения относительно .приводной шестерни.
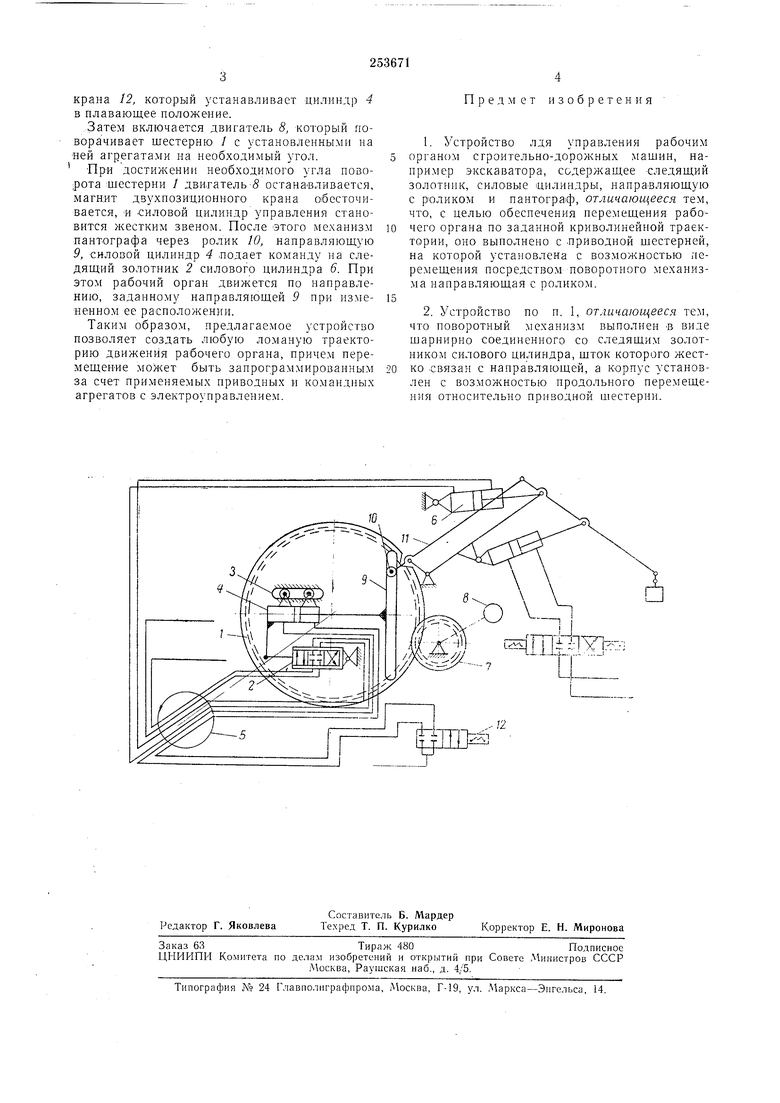
На чертеже представлена принципиальная схема описываемого устройства.
Устройство содержит шестерню /, на которой закреплены следящий золотник 2, направляющая 3 и поворотный механизм 4.
На оси шестерни / установлен коллектор 5, через который осуществляется подвод и отвод рабочей жидкости от следящего золотника 2 и поворотного механизма 4, выполненного в виде шарннрно соединенного со следящим золотником силового цилиндра. Следящий золотник 2 управляет силовым цилиндром 6.
Шестерня / находится в зацеплении с щестерней 7, насал енной на вал двигателя 8. Следящий золотник 2, как указано выше, соединен шарнирно с цилиндром 4, корпус которого может перемещаться в направляющих 3. Шток силового цилиндра 4, .пересекающийся с осью шестерни /, л естко соединен с направляющей 9, по которой может катиться ролик 10, установленный на конце звена механизма пантографа П. Команда на цилиндр 4 осуществляется двухпозиционным краном 12.
крана 12, который устанавливает цилиндр 4 в плавающее положение.
Затем включается двигатель 8, который поворачивает шестерню / с установленными на ней агрегатами на необходимый угол. При достижении необходимого угла поворота шестерни 1 дви.гатель 5 останавливается, магн;ит двухпозиционного крана 0 бесточивается, и .силовой цилиндр управления становится жестким звеном. После этого механизм пантографа через ролик 10, направляюш;ую 9, силовой цилиндр 4 .подает команду на следящий золотник 2 силового цилиндра 6. При этом ра:бочий орган движется по направлению, заданному направляющей 9 при измененном ее расположении.
Таким образом, предлагаемое устройство позволяет создать любую ломаную траекторию движения рабочего органа, причем неремещенИе моЖет быть запрограммированным за счет применяемых приводных и командных агрегатов с электроуправлением.
Предмет изобретения
1.Устройство лдя управления рабочим органом сгроительно-дорожных машин, например экскаватора, содержащее следящий золотник, силовые цилиндры, напра.вляющую с роликом и пантограф, отличающееся тем, что, с целью обеспечения перемещения рабочего органа по заданной криволинейной траектории, оно вынолнено с лриводной шестерней, на которой установлена с возможностью перемещения посредством поворотного механизма направляющая с роликом.
2.Устройство но п. 1, отличающееся тем, что поворотный механизм выполнен в виде шарнирно соединенного со следящим золотником силового цилиндра, шток которого жестко связан с направляющей, а корпус установлен с возможностью продольного пере.мещения относительно приводной шестерни.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для КООРДИНАЦИИ ДВИЖЕНИЯ ДВУХЗВЕННОЙ СТРЕЛЫ ГИДРАВЛИЧЕСКОГО КРАНА | 1970 |
|
SU261674A1 |
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ РАБОЧЕГО ОРГАНА СТРЕЛОВОГО КРАНА | 1971 |
|
SU293756A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ | 1970 |
|
SU421615A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 1967 |
|
SU206056A1 |
| Система управления манипулятором | 1980 |
|
SU884997A1 |
| Захватное устройство для контей-HEPOB | 1979 |
|
SU816932A1 |
| Гидравлический кран-манипулятор | 1975 |
|
SU865771A1 |
| БЕТОНОУКЛАДЧИК ДЛЯ УКЛАДКИ БЕТОННЫХ ПОЛОС ПОЛОВ И ДОРОГ | 1972 |
|
SU344063A1 |
| Манипулятор с ручным управлением | 1985 |
|
SU1315288A1 |
