Известно устройство для иеремеи ения рабочего органа стрелового крана, включающее силовые дилиидры, пантограф с роликом и направляющую.
Отличительная особенность предлагаемого устройства состоит в том, что оно выполнено с лотенциометрами, ползун одного из которых жестко соединен с рабочим органом, а ползун другого с кривощипом. На конце кривощипа смонтирован ролик, взаимодействующий с куллсой, соединенной с направляющей ролика пантографа. Это автоматизирует процесс иеремещения рабочего органа по заданной траектории на любом вылете стрелы трехзвеиного стрелового краиа.
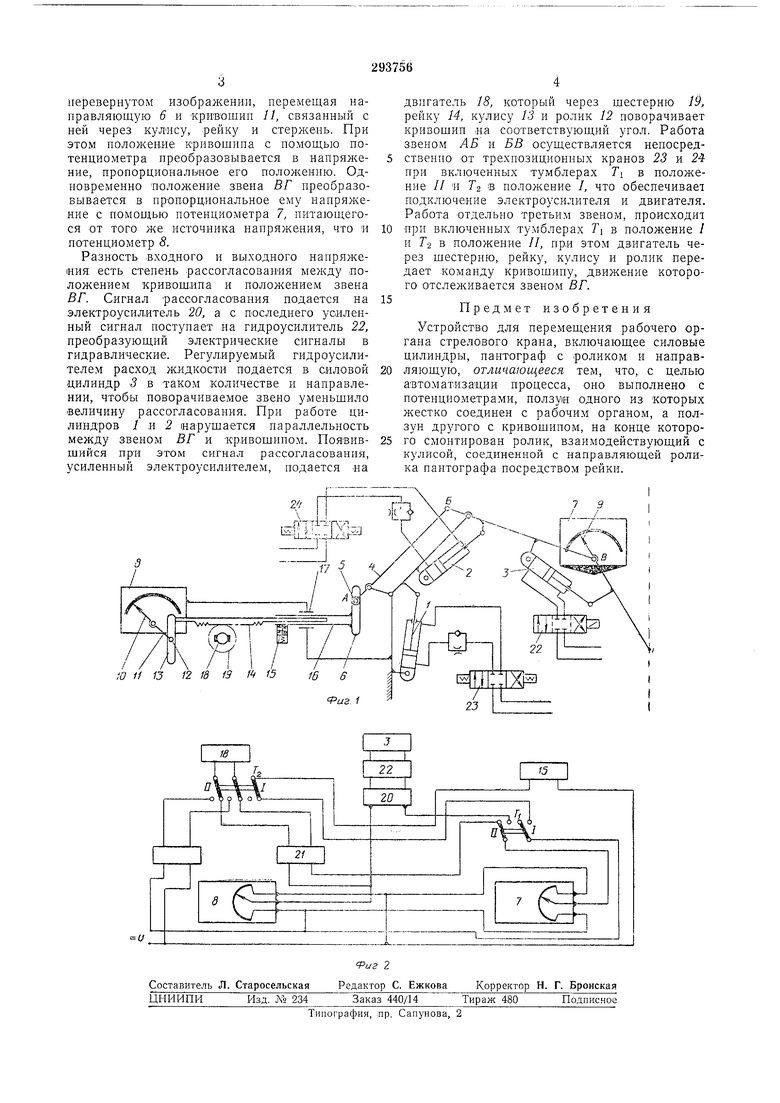
На ф.иг. 1 изображена принципиальная схема предлагаемого устройства; на фиг. 2 - блок-схема следящей системы.
Устройство для иеремещения рабочего органа стрелового крана содержит силовые цилиндры 1, 2 и 3, падтограф 4 с роликом 5 и направляющей 6 и потенциометры 7 и 8.
Потенциометр 7 выявителя рассогласования установлен на звене Вг крепления рабочего органа, прячем ползун 9 жестко связан с этим звеном, а корпус под действием смещенного центра тяжести переносится параллельно корпусу потенциометра 8 при движении щариирно сочлеиенных звеньев АБ, БВ и ВГ рабочего органа.
Корпус потенциометра 8 неподвижно закреплен иа станине стрелы. Ползун 10 выявителя рассогласования потенциометра 8 соединен с кривошипом 11, на конце которого смонтирован ролик 12, взаимодействующий с кулисой 13, жестко связанной с рейкой 14. Конец рейки выполнен в виде стержня, телескопически или жестко связанного пр.и помощи электромагнитного фиксатора 15
со стержнем 16, который в свою очередь жестко связан с направляющей 6 пантографа и может возвратно-поступательно перемещаться в неподвижной опоре 17. Направляющая 6 соединена с механизмом пантографа с помощью ролика 5, установленного на конце звена пантографа. Рейка 14 связана с двигателем 18 посредством шестерни 19, установленной на валу. Следящая система устройства, кроме потенциометров рассогласования 7 и 5, имеет электроусилители 20 и 21 и гидроусилитель 22.
Для перемещения рабочего органа по вертикали включают тумблеры Г) и TZ, при этом иотенциометры подключаются к электроусилителю 20 и включается фиксатор 15, а затем включают трехиозиционные краны 23 и 24. Это вызывает перемещение точки В звена ВГ вверх. При этом ось ролика 5 пантографа ол.исывает в соответствующем мас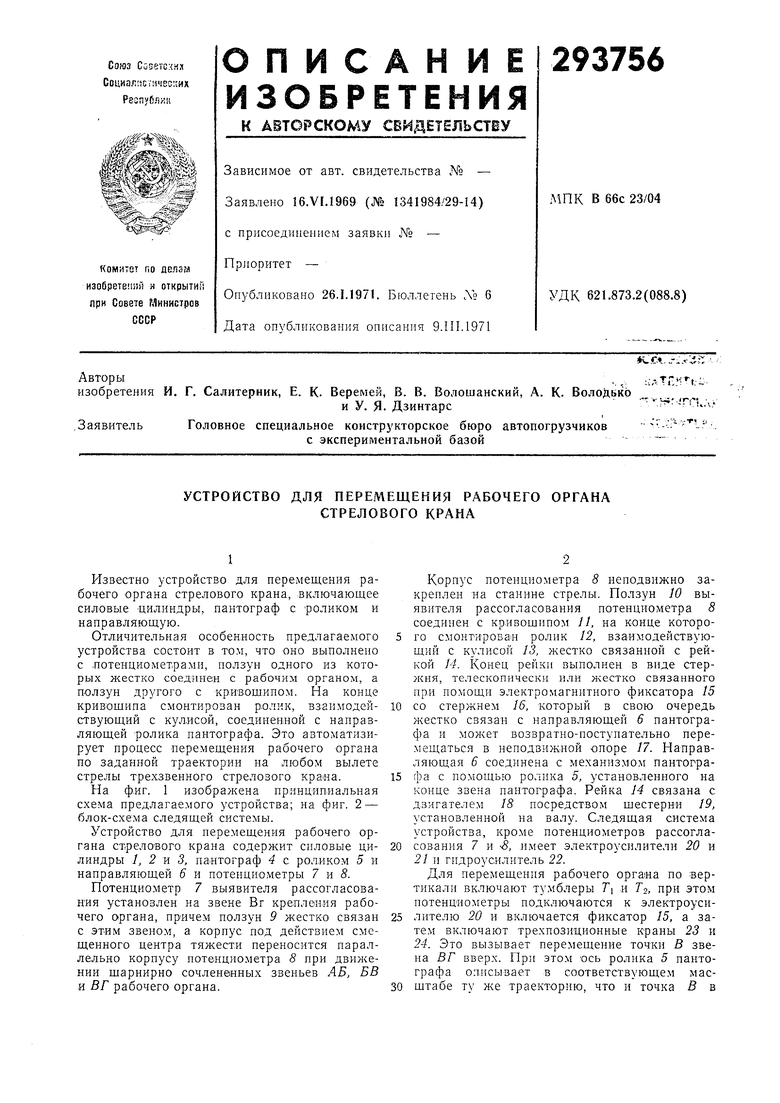
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для КООРДИНАЦИИ ДВИЖЕНИЯ ДВУХЗВЕННОЙ СТРЕЛЫ ГИДРАВЛИЧЕСКОГО КРАНА | 1970 |
|
SU261674A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ | 1970 |
|
SU421615A1 |
| Система управления стреловым краном | 1974 |
|
SU520318A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ СТРОИТЕЛЬНО-ДОРОЖНЫХ МАШИН | 1969 |
|
SU253671A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УРАВНОВЕШИВАНИЯ ГИДРАВЛИЧЕСКОГО СТРЕЛОВОГО КРАНА | 1966 |
|
SU178073A1 |
| МЕХАНИЧЕСКАЯ РУКА | 1969 |
|
SU247753A1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 1967 |
|
SU206056A1 |
| МОДЕЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СИНТЕЗА И АНАЛИЗА МАЛЬТИЙСКИХ МЕХАНИЗМОВ | 1971 |
|
SU290854A1 |
| СТРЕЛОВОЙ ГРУЗОПОДЪЕМНЫЙ КРАН | 2014 |
|
RU2572354C1 |
| ПОГРУЗЧИК "ПРЯМАЯ ЛОПАТА" | 1993 |
|
RU2081052C1 |
