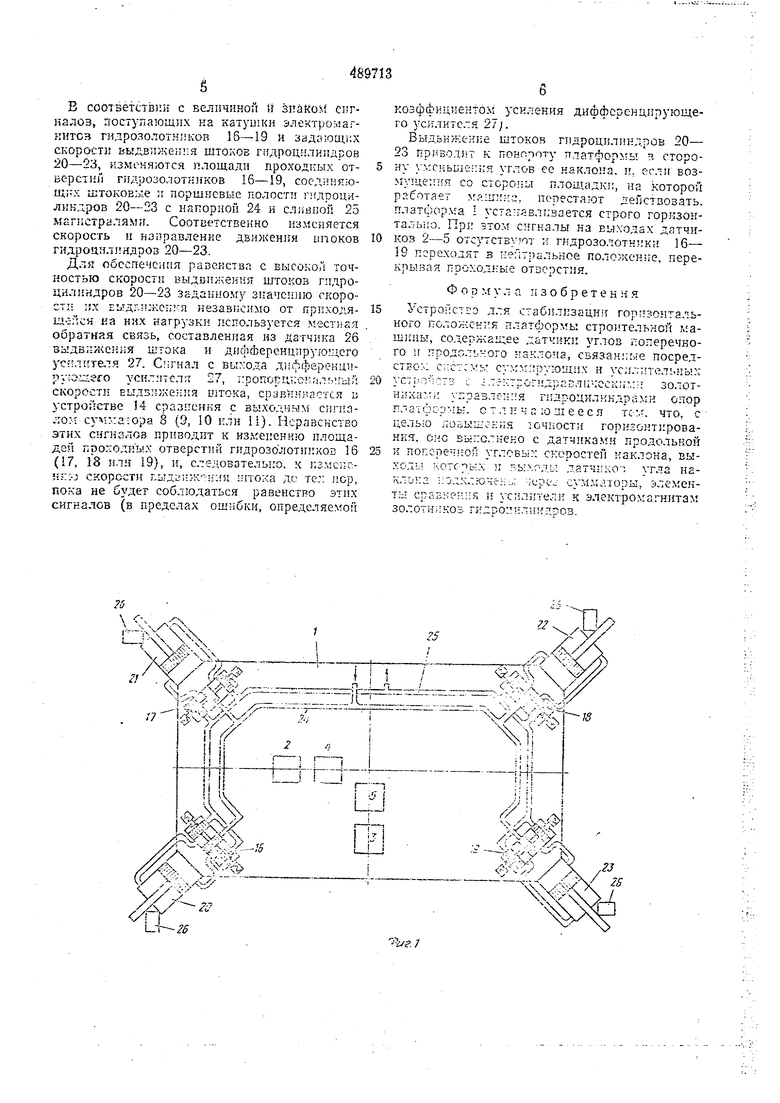
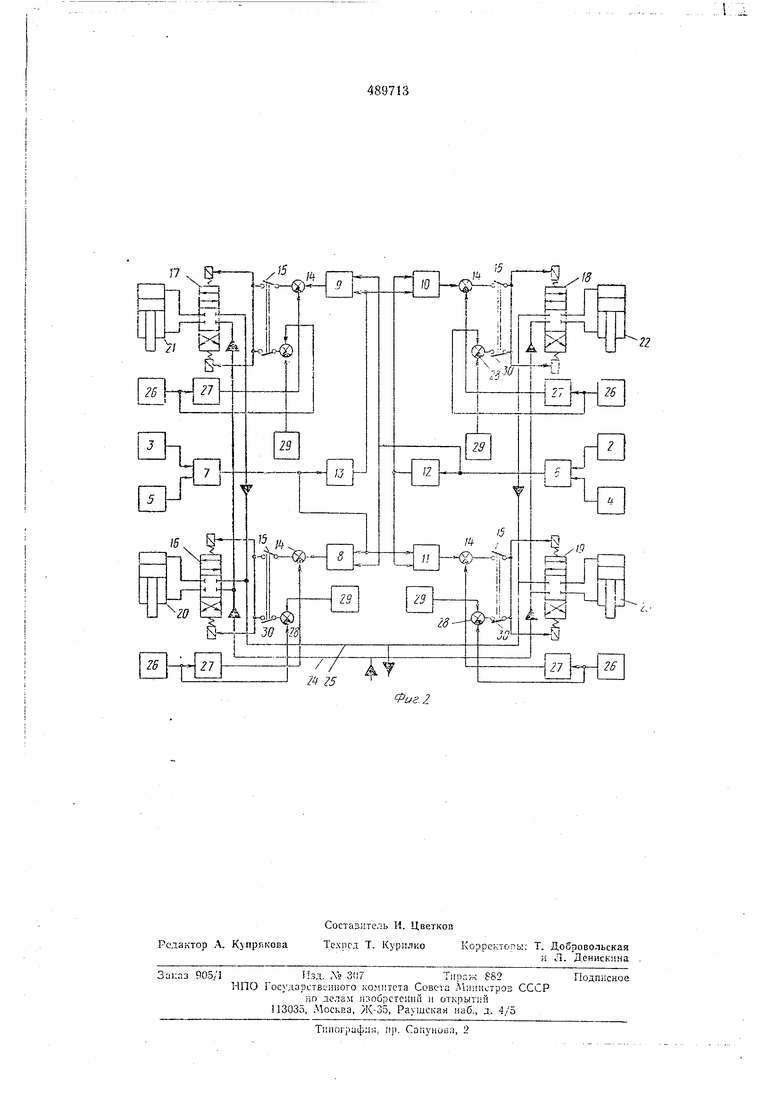
тов элёктрогндрозолотников 16-19, управляющих соответственно гидроцилиндрами 20-23. Корпуса гидроцилиндров 20-23 жестко соединены с горизонтируемой платформой 1, а их штоки - с конструктивными элементами выносных опор или с ходовыми тележками машины в зависимости от того, предназначено устройство для стабилизации горизонтальностн платформы при работе на выносных опорах или при передвижении машины. Рабочая жидкость подается к гидрозолотникам 16-19 под давлением по напорной магистрали 24, а отводится по сливной магистрали 25 (насос, бак, клапаны на чертеже не показаны). На гидроцИлиндрах 20-23 смонтированы датчики 26 выдвижения штока, например индукционного тииа, выходной сигнал коюрых пропорционален длине выдвинутого участка штока. Выходы датчиков 26 соединены через дифференцирующие усилители 27 со вторыми входами элементов 14 сравнения, а также со входами элементов 28 сравнения, вторые входы которых подключены к источникам 29 регулируетйого задаюш,его папряженья, а выходы - через нормально замкнутые контакты 30 к катушкам электромагнитов злектрогпдрозолотников 16- 19. Контакты 15 л 30 сблокированы и замкнутыми одновременно быть не могзт. Предлагаемое устройство для стаб1:л;;зации горизонтального положения платформы строительной машины работает следующим образом. Вначале контакты 30 устанавливаются замкнутыми, а контакты 15 - разомкнутыми. На выходах источников 29 задаюшего напряжения устанавливается напряжение, соответствующее такому выдвижению штоков гидроцилиндров 20-23, при котором все выносные опоры хттираются в плошадку. При применении устройств.а для стабилизации платформы крана при его передвижении напряжения на выхода.х источников задающего напряжения 29 устанавливаются равными и соответствзЮщими выдвижению штоков гидроцилиндров 20-23, на половину их длины. Напряжения с выходов источников 29 подаются через элементы 28 сравнения и замкнутые контакты 30 на катушки электромагнитов п.дрозолотников . При этом золотникя открывают доступ рабочей жидкости из напорной магистрали 24 в поршневые полости гидроцилиндров 20-23, а из штоковой полости - в сливную магистраль 25. Штоки гидроцнлиндров 20-23 начинают выдвигаться, напряжения на выходах датчиков 26 выдвижекня штоков начинают возрастать, и, когда они станут равными выходным напряжениям источников 29, сигналы на выходах элементов сравнения 28 станут равными нулю, гидрозолотники 16-19 вернутся в }1сходное положение, перекроют проходные отверстия, н выдвижение штоков прекратится. Теперь штоки гидроцилиндров 20-23 заниают положения, соответствуюш,ие выходным апряжениям источников 29. Эти положения читаются исходны.ми, относительно которых роизводится горизонтирование платформы 1 машины. После окончания предварительного выдвижения штоков гидроцилиндров 20-23 конакты 30 размыкаются, а контакты 15 замыкаются. В этом случае выходные сигналы датчиков 2 и 3 углов наклона платфорг ы 1 и датчиков 4 и 5 угловых скоростей поступают через сумматоры 6 и 7, инверторы 32 и 13 и сумматоры 8-II на входы элементов 14 сравнения. Сигналы, поступающие на элементы 14 сравнения от сумматоров 8-И несут информацию о текущих значениях углов наклона платформы i в двух плоскостях и о текущих значен ях скоростей наклона. Инфсрмащя о текущих зпаченшх скоростей нак,ока позволяет реализовать устройстБо;, кзодромный закон регулирования, сочетающей в себе высокую точность интегрального закона (регулирование по интегралу от стабилизируемого параметра) с большим быстродействием иропорционального закона (регулирование по самому стабилизируемому параметру). Выходные сигналы Ui сумматоров 8-II являются суммам) двух сигналов U i и Hi , где i - номер сумматора, причем t/S -- а -j- я; i/э - я -|- а; Uio - - я - о ; Uu - - к - а; р; и,.; Ulo .- - р - р; р + , где: а; а - соответственно выходные сигналы датчика 2 угла продольного наклона и Датчика 4 продольной угловой скорости наклона платформы; J3; 3 - соответственно выходные сигналы датчика 3 угла поперечного наклона и датчика 5 поперечной угловой скорости наклона платформы 1. .Таким образом, выходные сигналы су.мматоров 8-11 являются суммами двух сигналов - сигнала на отработку угла продольного наклона (a-j-a) и сигнала на отработку угла поперечного наклона (р+|3) платформы машины, причем сигналы на отработку угла продольного наклона, поступающие на катущки электрогидрозолотпикоБ 16 и 17, равны между собой и противоположны по знаку аналогичны. сигналам, поступающим на катушки элсктрогидрозолотников 18 и 19, а сигналы на отработку угла поперечного наклона, поступающие на катушки электрог}:дрозолотников 16 и 19, равны между собой и протпвополол ны по знаку аналогичным сигнала.м, поступающим на катушки электрогндрозолотникоз 17 и 18. Это означает, что поворот платформы вследствие выдвижения штоков гидроцнлиндров 20-23 происходит без изменения высоты ее центра.
В соответстЬик с величиной ii знаКоМ спгкалоз, поступающих ка катушки электромагкитсз гндрозолоти.иков 16-19 и задаюаи х скорости выдвлже;г ;я штоков гидроцмлилдров 20-23, измоняются площади проходмых отверстий гидрозолоткиков 16-19, соеднияю1д;;х штоковые и поршневые полосп гидроцйликдров 20-23 с напорной 24 и 25 хтагпстралями. Соответственно изменяется скорость п ноправленке движения ипоков гндроцилиндров 20-23.
Для обеспечения равенства с высокой точностью скорости выдвпжеи1:я штокоз гидроцил ндров 20-23 заданному значению скороcTii Еьтдглжспкя HesaBfJCH.Mo от приходяШсйся ка них нагрузки используется мест)ая обратная связь, состазлениая из датчика 26 зыдв; жен;;я штока н длфберенцпруютдсго ус гл11те.тя 27. Сигнал с выхода дифферекциpvioictsfo усн. 27, irponopuiOKrj.ibMbi;: cKopocTJi выдвижения штока, сравнивается и устройстве 14 сразпенкя с выходным снгнялом сум:.,:а;ора 8 (9, 10 или И). Неравенство этих сигналов приводит к изменению площадей проходных отверстий гидрозолот}п:ков 16 (17, 18 или 19), и, следовательно, к 1;змс }Г:Н::;-:) скорости пыдзнж глтя патока до тех лор, пока не будет соблюдаться равенство этих сигналов (в пределах ошибки, определяемой
коэффициентом усиления дифференцирующего .я 27).
Выдвижение штоков гидроциликдров 20- 23 приводит к повороту платфор.;ь в сторону у .:сньше:: :я углов ее наклона, и. если возму1це:1: я со стороны площадки, на которой работает .::, перестают действовать, платфор.:а уста-гйвливается строго горнзонталььо. При зтом сигналы на выходах датчиков 2-5 отсутству от и гидрозолотник;; 16- 19 переходят в кеГ1Т)альное положение, перекрывая проходные отосрстия.
Фор м у л а изобретен Ji я
l CTpoi-CTEo для стаб1 Л :зации горизонтального положения платформы строительной машины, содержащее датчики углов поперечного и ггродол1.-:ого наклона, связанные посредством с;1ст:мь сул:м;;рующих и усл.-;ительнь Х }С7;-о СТ1} с с.гктрогидразлЦГеским;; золотнлха:,гя у1:разлеи::Я гидродклкндрамн опор ллатфср ы. отличающееся тс:,, что, с целью лооыщгкия точности горизонтироваНЕЯ, сне выполнено с датчиками продольной и попс-реч.чой угловых скоростей наклона, выОДЬ KOTClfcTX и ; -Ь;ХГДЬ;
датчи
тла на:-;О
клона ;;одх.:юче:;:.; чере сумматоры, ;)лементы сраБненпя и усилител к электромагнитам
ЗОЛОТН:.:КОН. Г5:ДГ0::ЛИНДрОВ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1984 |
|
SU1339038A1 |
| Устройство управления ковшом экскаватора переменной емкости | 1986 |
|
SU1402650A1 |
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1981 |
|
SU1009817A1 |
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА БАЗОВОМ ШАССИ ТАНКА | 2000 |
|
RU2170905C1 |
| СПОСОБ МОМЕНТНОЙ ЗАЩИТЫ СТРЕЛОВОГО КРАНА ПО СИГНАЛАМ ДАТЧИКОВ ОПОР И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2245294C2 |
| УСТРОЙСТВО ДЛЯ ОТРАБОТКИ ОТКОСОВ УСТУПОВ | 2016 |
|
RU2618806C1 |
| Тренажер для обучения персонала транспортных средств | 1984 |
|
SU1163346A1 |
| Устройство для стабилизации заданного положения платформы транспортного средства | 1990 |
|
SU1743916A1 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 1996 |
|
RU2129305C1 |
| Электродинамический вибратор | 1984 |
|
SU1248673A2 |
- ( -I 1, У -- п . . П Г
А
, X Л-ГХ
)
. /X
,Лч/
р . -c S - 5/.5
