Известно рабочее оборудование экскаватора, включающее стрелу с шарнирной онорой, рукоять, соединенную шарниром со стрелой, гидроцилиндры поворота стрелы и рукояти, линии питания которых соединены с золотником, имеющим электромагниты управления.
Однако известное рабочее оборудование обладает тем недостатком, что нри производстве земляных работ экска1ватором вследствие криволинейного движения ковща в зоне резания грунта образуется профиль, обусловленный траекторией этого движения. Ручная доработка полученного профиля с целью выравнивания поверхности основания составляет 10-20% общего объема земляных работ.
Для поддержания заданной зависимости между углами поворота стрелы и рукояти, Обеспечивающей прямолинейное перемещение рабочего органа, в предлагаемом рабочем оборудовании экскаватора в щарнирной опоре стрелы и в щарнирне крепления рукояти к стреле установлены датчики углов поворота, соединенные с усилителем, взаимодействующим с электромагнитами управления золотника.
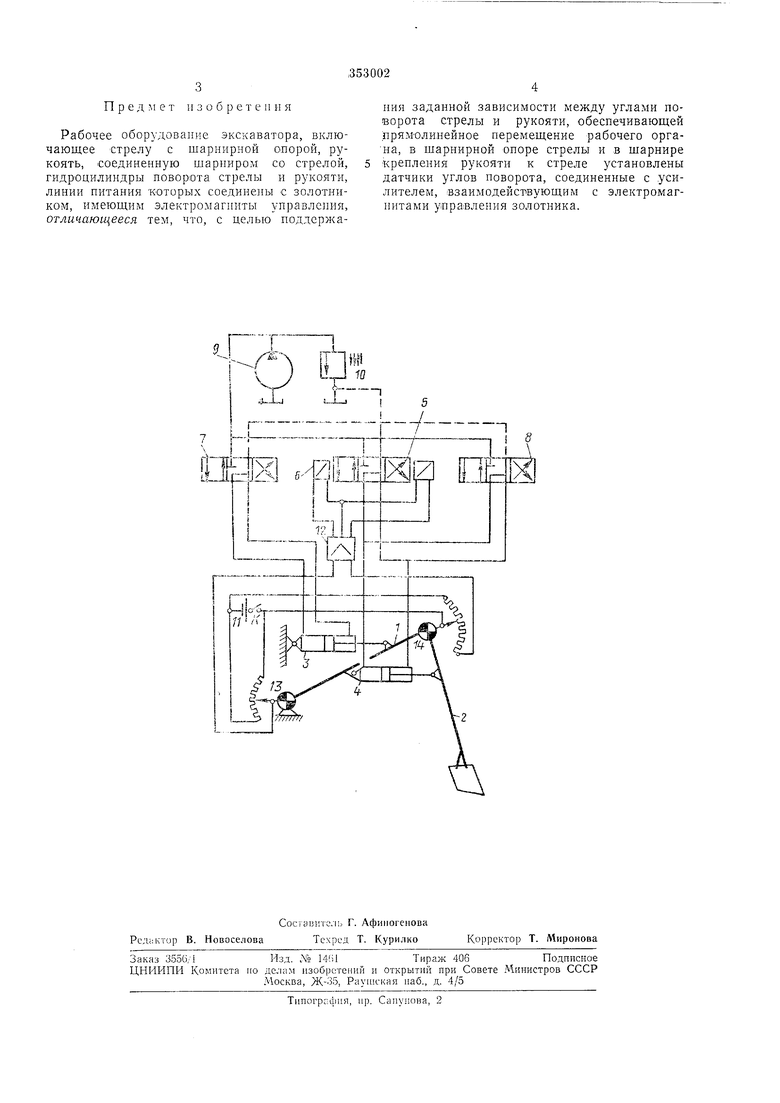
Рабочее оборудование экскаватора включает стрелу 1, рукоять 2, гпдроцилиндр 3 поворота стрелы, гидроцилиндр 4 поворота рукояти, золотник 5, имеющий электромагнн1ты управления 6, распределительные золотники 7 и 8, гидронасос 9 с предохранительным клапаном 10. Электромагниты управления 6 золотника 5 подключены к электрической системе, состоящей из источника питания //, усилителя 12 и датчиков 13 и М
углов поворота, установленные в щарнирной
опоре стрелы и в щарнире крепления рукояти
к стреле.
Рабочее оборудование экскаватора работает следующим образом.
При изменении угла наклона стрелы гидроцилиндром 3 с помощью золотника 7 происходит изменение сопротивления датчика 13
угла поворота, которое до включения сбалансировано сопротивлением датчика 14 угла поворота. Рассогласование сопротивлений вызывает сигнал в виде электрического тока определенного направления, который через
усилитель 12 подается на соответствующий электромагнит золотника 5, вызывая срабатывание гидроцилиндра 4, который изменяет угол между стрелой и рукоятью, что, в свою очередь, изменяет сопротивление датчика
Предмет изобретения
Рабочее оборудование экскаватора, включающее стрелу с шарнирной опорой, рукоять, соединенную шарниром со стрелой, гидроцилиндры поворота стрелы и рукояти, линии питания которых соедине 1ы с золотником, имеющим электромагниты управления, отличающееся тем, что, с целью поддержания заданной зависимости между углами поворота стрелы и рукояти, обеспечивающей прямолинейное перемещение рабочего органа, в шарнирной опоре стрелы и в шарнире крепления рукояти к стреле установлены датчики углов поворота, соединенные с усилителем, взаимодействующим с электромагнитами упра1вления золотника.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование экскаватора | 1986 |
|
SU1435718A1 |
| Способ копания одноковшовым гидравлическим экскаватором и одноковшовый гидравлический экскаватор | 1982 |
|
SU1016433A1 |
| Способ копания одноковшовым экскаватором и устройство для его осуществления | 1976 |
|
SU749988A1 |
| Способ управления рабочим оборудованием экскаватора | 1978 |
|
SU885458A1 |
| Рабочее оборудование одноковшового экскаватора | 1979 |
|
SU777164A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1968 |
|
SU219457A1 |
| Рабочее оборудование гидравлического экскаватора | 1985 |
|
SU1302000A1 |
| Самоходный гидравлический экскаватор | 1984 |
|
SU1313956A1 |
| Гидропривод экскаватора | 1981 |
|
SU1028792A1 |
| Рабочее оборудование гидравлического экскаватора | 1986 |
|
SU1377335A1 |
Птг-1Т 71 rW LliilJ/ J l/ lLJirinK l /; Lit:
L.
r.:,r:
I
