1
Изобретение относится к следящему при:U),T,Y с двухфазным асинхронным исполнительным двигателем н сельсинами в качестве датчиков рассогласования и предназначается для исиользования, когда ведущий и следящий валы разнесены на расстояние, нри котором имеет существениое значение количество соединительных нроводов ьгежду элементами нривода.
Известны следящие приводы, содержащие выходной исполнительный двигатель, механическ1 связанный через редуктор со следящим i,;;.ioM, датчик угло рассогласования, механическ1 связанный с ведун,им валом, нриемник углов рассогласовання, выход которого через усилитель подключен к обмотке управления выходного исполнительного двигателя.
Однако нриходящиеся в таких приводах иа каждуи- пару синхронно связанных валов не менее шести нроводов в соедииительной линии при работе но точному н грубому каналам сущсстиенио осложняют осуществление синхронгюй , когда требуется связать негколько пар валов.
Иредлг.гаемый следящий прпвод содержит промежуточный исполиительиый двигатель, ;-; па ЛОГИЧНЫ выходному исполнительному Д Л1гателю н расположенный с приемником усилителем иа стороне ведущего вала так, что его ось через редуктор механически связана с осью приемника, а оомотка управления подключена к выходу усилителя через соединительную линию последовательно с обмоткой управления исполнительного двпгателя. Для предотвращения рассогласования валов при перерывах электропитания на стороне следящего вала в цепи обмотки управления исполнительного двигателя имеются контакты реле, обмотка которого соединена параллельно с обмоткой возбуждения исполнительного двигателя.
Это позволяет при синхронной связи нескольких пар валов для каждой пары иметь в соединительной лииии только один провод и один общий провод для всех сннхронно связанных валов.
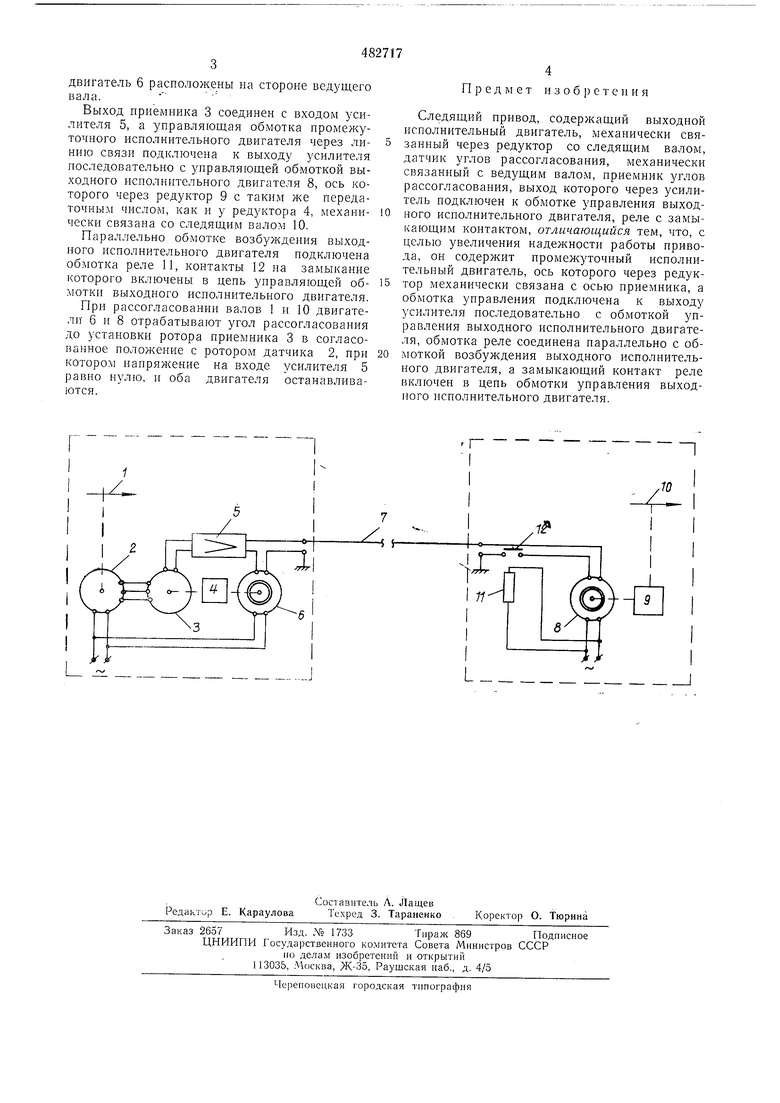
На чертеже нриведена структурная схема нредлагаемого следящего привода.
Он содержит ведущий вал 1, датчик 2 углов рассогласования, приемник 3 углов рассогласования, редуктор 4 ведущего вала, усилитель 5, промежуточный исполнительный двигатель 6, соединительную линию 7, выходной исполиительный двигатель 8, редуктор 9 следяп его вала, следящий вал 10, обмотку реле 11, контакты 12 реле на замыкание.
Ведущий вал 1 мехаиически связан (показано пунктирной линией) с осью датчика 2.
Датчик 2, приемник 3, редуктор 4, усилитель 5 и промежуточный исполиительный
двигате.ть 6 расположены на стороне ведущего вала.
Выход нриемника 3 соединен с входом усилителя 5, а управляющая обмотка промежуточного исполнительного двигателя через линию связи подключена к выходу усилителя последовательно с управляющей обмоткой выходного исполнительного двигателя 8, ось которого через редуктор 9 с таким же передаточным числом, как и у редуктора 4, механически связана со следящим валом 10.
Параллельно обмотке возб окдения выходного исполнительного двигателя подключена обмотка реле 11, контакты 12 на замыкание которого включены в цепь управляющей обмотки выходного исполнительного двигателя.
При рассогласовании валов 1 и 10 двигатели 6 и 8 отрабатывают угол рассогласоваиия до установки ротора приемника 3 в согласованное положение с ротором датчика 2, при котором напряжение на входе усилителя 5 равно нулю, н оба двигателя останавливаются.
П ) е д м е т изобретения
Следящий привод, содержащий выходной исполнительный двигатель, механически связанный через редуктор со следящим валом, датчик углов рассогласования, механически связанный с ведущим валом, приемник углов рассогласования, выход которого через усилитель подключен к обмотке управления выходного исполнительного двигателя, реле с замыкающим контактом, отличающийся тем, что, с целью увеличения надежности работы привода, он содержит промежуточный исполнительный двигатель, ось которого через редуктор механически связана с осью приемника, а обмотка управления подключена к выходу усилителя последовательно с обмоткой управления выходного исполнительного двигателя, обмотка реле соединена параллельно с обмоткой возбуждения выходного исполнительного двигателя, а замыкающий контакт реле включен в цепь обмотки управления выходного исполнительного двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения рассогласования следящих систем | 1982 |
|
SU1065865A1 |
| Устройство для отработки заданногоположения регулирующего органа | 1973 |
|
SU508779A1 |
| Устройство для синхронизации объектов | 1975 |
|
SU607180A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАЗДЕЛЬНЫМИГИДРОПРИВОДАМИ МЕХАНИЗМА ПЕРЕДВИЖЕНИЯМОСТОВОГО КРАНА | 1971 |
|
SU424802A1 |
| Следящий электропривод | 1980 |
|
SU903804A1 |
| УСТРОЙСТВО Для КОНТРОЛЯ СИНХРОННО-СЛЕДЯЩИХСИСТЕМ | 1969 |
|
SU251649A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ СТАБИЛИЗАЦИИ ПОПЕРЕЧНОГО НАКЛОНА РОТОРНОЙ СТРЕЛЫ ЭКСКАВАТОРА | 1973 |
|
SU372324A1 |
| СУДОВОЕ АВТОМАТИЧЕСКОЕ РУЛЕВОЕ УСТРОЙСТВО | 1966 |
|
SU180974A1 |
| Устройство для измерения погрешности многополюсного датчика угла | 1980 |
|
SU877723A1 |
| Следящая система | 1973 |
|
SU533912A1 |
