1
Изобретение относится к области захватных устройств для манипуляторов и может быть использовано для оснащения манипуляторов с автоматическим, а также с дистанционным управлением.
Известен двухпальцевый захват манипулятора, оснащенный тактильными датчиками, реагирующими на соприкосновения с объектами и измеряющими усилие захвата, и датчиками для определения положения объектов внещней среды.
Предлагаемый манипулятор отличается от известных тем, что каждый палец захвата облицован шарнпрно установленными пластинами, несущими контакты тактильных датчиков, и оснащен системой бесконтактных датчиков, например локационных, фотометрического типа, у которых каждому фотодиоду соответствует собственный источник света, расположенный соответственно напротив фотодиода на противоположном пальце или рядом с фотодиодом и излучающий направленный световой поток, а весь захват выполпен съемным, при этом стыковочный узел выполнен в виде конического соединения с байонетным замком, электроразъемом и электроконтактным датчиком стыковки.
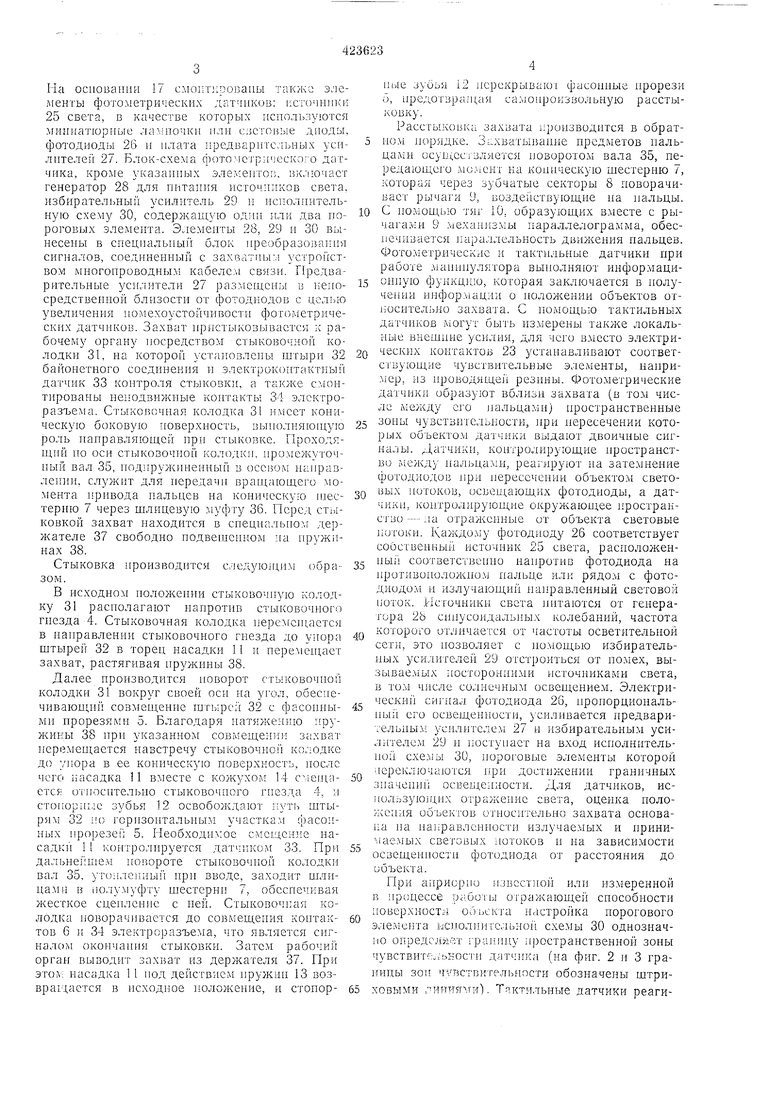
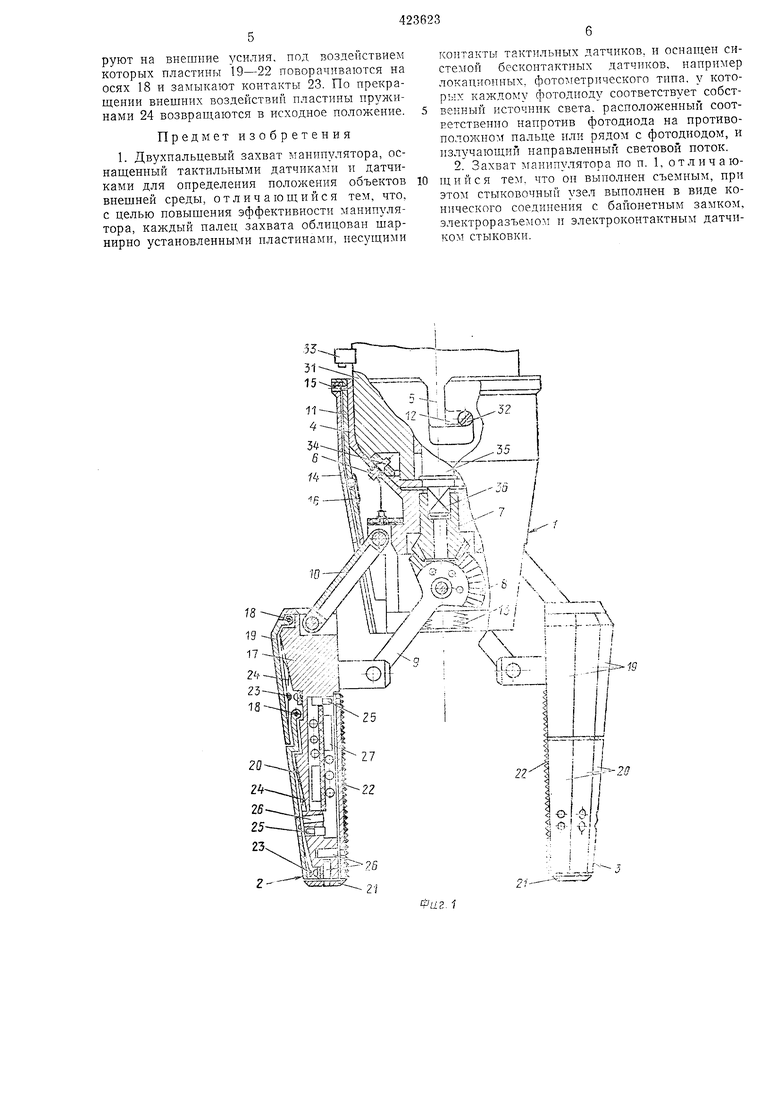
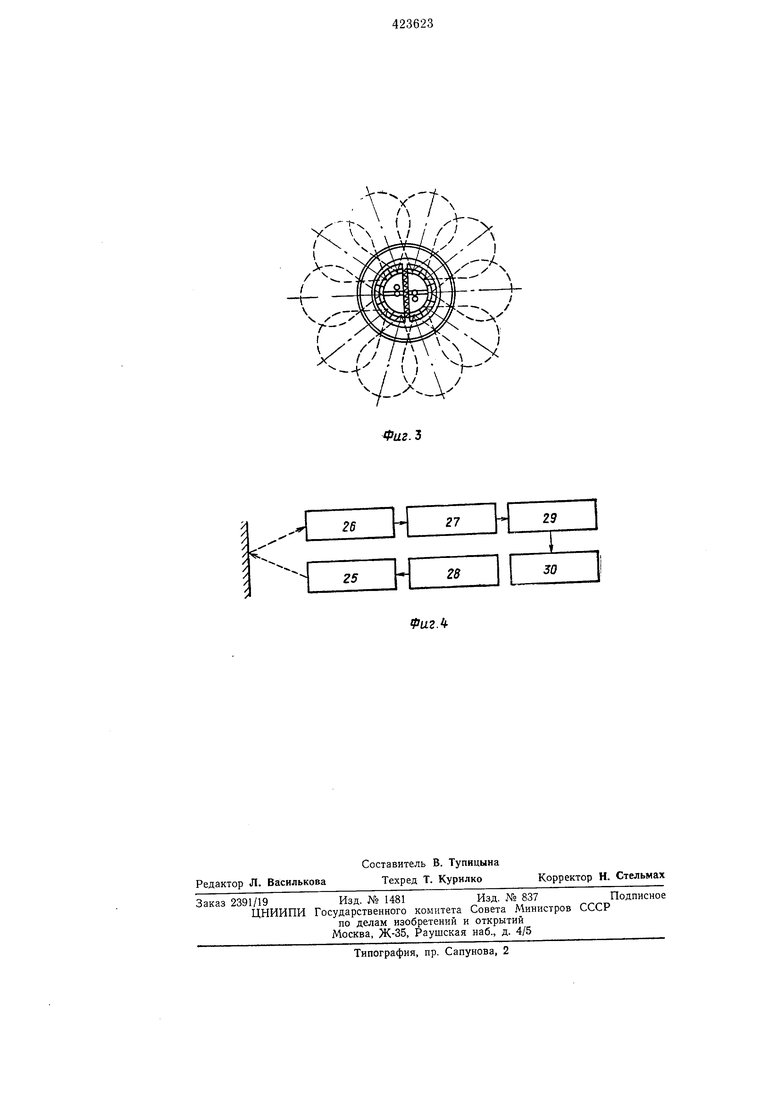
Па фиг. 1 схематично изображен предлагаемый захват в пристыковапном положении, общий вид; на фиг. 2 - расположение зон чувствительности фотометрических датчиков и положение захвата в держателе, общий вид; на фиг. 3 - расположение зон чувствительности фотометрических датчиков, вид снизу; на
фиг. 4 - блок-схема фотометрического датчика.
Предлагаемый захват имеет корпус 1 и два пальца 2 п 3, стыковочное гнездо 4 с фасонными прорезями 5 байонетного соединения п
отверстиями, в которых расположены подпружиненные контакты 6 электроразъема. Коническая шестерня 7 п зубчатые секторы 8 вместе с рычагами 9 н тягами 10 образуют кинематическую цепь привода пальцев. На наружную поверхность стыковочного гнезда 4 надета подвпжная насадка 11, которая имеет стопорные зубья 12 и удерживается в исходном положении пружинами 13. Кожух 14 корпуса 1 является общпм восприпимающим элементом группы тактильных датчиков и удерлчнвается щтифтами 15 и пружипами 16 соосно с насадкой И, относительно которой может поворачиваться, замыкая электрические контакты, смонтированные по
окружности в нижней части насадки 11. Каждый из пальцев содержит основание 17, на котором с помощью осей 18 подвещены пластины 19-22, замыкающпе при повороте электрпческие контакты 23. Пластины удерживаются в исходном положении пружинами 24. На основании 17 смо1;т;1ро заны также элементы фото: 1етрических датчнков: 11сточники 25 света, в качестве которых используются миниатюрные лампочки или сзстоные диоды фотодиоды 26 и плата предварительных усилителе 27. Блок-схема фотометрическо.го датчика, кроме указанных элементов, включает генератор 28 для нитаиня псточпиков света, избирательнвтй усилитель 29 н исполнительную схему 30, содержащую одии или два но-ротовых элемента. Элементы 28, 29 и 30 вынесены в специальный блок преобразования сигналов, соединенный с захватг1ы:л ycTpoiicTвом многонроводиым кабеле, связи. Предварительные усилители 27 размещсиы в неиосредствеииой близости от фотодиодов с целью увеличеиия иомехоустойчивости фотометрических датчиков. Захват нристыковывается ;с рабочему органу иосредством стыковочной колодки 31, на которой установлены штыри 32 байоиетного сосдииения и электрокоитал-стный датчик 33 коитроля стыковки, а также смоитироваиы неподвижные контакты 34 электроразъема. Стыковочная колодка 31 имеет коиическую боковую поверхиость, выиолняюгцую роль направляющей нри стыковке. Проходяндий 110 оси стыковочной колодки, иро: 1ежуточиый вал 35, иодпружиненный в oceiiOM иаиравлепии, служит для передачи враидающего момента нривода нальцев на коническую и 1естерпю 7 через шлицевую :,1уфту 36. Перед CTi,iковкой захват находится в сиецнально:,г держателе 37 свободно иодвешеином -га иружииах 38. Стыковка производится следуюи им образом. В исходном иоложеини стыковочную колодку 31 раснолагают наиротнв стыковочного гнезда 4. Стыковочная колодка нерел1сии1ется в иаиравлении стыковочного гнезда до упора штырей 32 в торец насадки 11 и иеремёп1,ает захват, растягивая иружииы 38. Далее нронзводится иоворот стыковочиой колодки 31 вокруг своей оси на угол, обеспечивающи совмещение штыре; 32 с фасонными прорезями 5. Благодаря натяжению пружины 38 ири указанном совмещении захват неремен1,ается навстречу стыковочной колодке до .иора в ее коннческую поверхность, после чего насадка 11 вместе с кожухом 14 c ieH aетс5: О1иоснтельно стыковочиого гнезда 4, и стопорные зубья 12 освобождают путь штырям 32 по горизонтальным участкам фасонных 1 рорезей 5. Необходимое смещение насад1;н 1 I контролируется 33. При да.льие :1пем повороте стыковочиой колодки вал 35, утоплеииый ирн вводе, заходит шлицами в иолу муфту шестернн 7, обесиечивая жесткое сцеилеиис с ней. Стыковочная колодка новорачивается до совмещения коитактов 6 и 34 электроразъема, что является сигнaлc) окончания стыковки. Затем рабочий орган выводит захват из держателя 37. При этол; иасадка 1 1 иод действием иружин 13 возврагдается в исходное положение, и стоиориые зубья 12 перекрываю фасонные нрорези .5, иредотвра/цая самопроизвольную расстыковку. Расстыковка захвата производится в обратно,м норядке. Захватьпшиие нредметов иальца1мн осунлес1зляется иоворотом вала 35, передающего .момент на коническую шестерню 7, которая через зубчатые секторы 8 поворачивает рычаги У, воздегютвующие па иальцы, С номощью тяг 10. образующих в,месте с рычагами 9 механизмы параллелограмма, обеспечивается параллельность движения пальцев. Фотометрические и тактильные датчики прн работе маиииулятора выиолняют информационную фуикцп.ю, которая заключается в нолучеиии ииформацин о ноложении объектов отпосител: но захвата. С номощью тактильных датчиков могут быть измерены также локальные внешние усилия, для чето в,место электрических контактов 23 устанавливают соответствующие чувствительные элементы, наири,мер, из ироводящей резины. Фотометрические датчики образуют вблизи захвата (в то,м чнсле между его пальцами) иространетвенные зоны чувствительности, нри нересечении которых объектол датчики выдают двоичные сигналы. Датчики, коитролнрующие иространство между нальцамн, реагируют на затемнение фотодиодов ири иересечсиии объектом световых потоков, освепдающ.нх фотодиоды, а датчики, контролирующие окружаюпдее пространcjBo -- .та отраженные от объекта световые потоки. Каждому фотодиоду 26 соответствует сооственный источник 25 света, расположенный соответственно ианротив фотодиода на нротивоиоложном пальце или рядом с фотодиодом и излучающий иаправленный световой поток. Источники света питаются от генератора 28 спиусоидальных колебаний, частота которого отличается от частоты осветительной сети, это иозволяет е номощью избирательных усилителей 29 отстроиться от номех, вызываемых посторонними источниками света, в том числе солнечным освещением, Электрически11 сигнал фотодиода 26, ироиорциональиы: его освещенности, усиливается нредвари:ельпым усилителем 27 и избирательным усилптеле,м 29 и поступает на вход исиолмительиой схемы 30, иороговые элементы которой переключаются нри достижении граничных зпачений освещенности. Для датчиков, ис1 олазую цих отражение света, оценка ноложеиия объектов о носительно захвата основапа на направленностп излучаемых и иринилаемых световых потоков и на зависимости освещенности фотодиода от расстояния до объекта. При априорио известной или измеренной в ироцессе работы отражающей способности оверхности обьск1а настро11ка порогового лемента ыС юлпиге.льно1 схемы 30 однозначно опреде.1кет rpainniy пространственной зоны чувствнте.;ьностп д;1тч1П(а (на фиг, 2 н 3 граицы зон тувствительпости обозначены штриовыми иниялги). Тактильные датчики реагируют на внешние усилия, под воздействием которых пластины 19-22 поворачиваются на осях 18 и задгыкают контакты 23. По прекращении внешних воздействий пластины нружинами 24 возвраш,аются в исходное положение.
Предмет изобретения
1. Двухпальцевый захват манипулятора, оснащенный тактильными датчиками и датчиками для определения положения объектов внещней среды, отличающийся тем, что, с целью повыщения эффективности манипулятора, каждый палец захвата облицован шарнирно установленными пластинами, несущими
контакты тактильных датчиков, и оснащен системой бесконтактных датчиков, например локационных, фотот-гетрического типа, у которых каждому фотодиоду соответствует собственный источник света, расположенный соответственно напротив фотодиода на противоположном пальце пли рядом с фотодиодом, и излучающий направленный световой поток.
2. Захват манипулятора но п. 1, отличающийся тем. что он выполнен съемным, нри стыковочный узел выполнен в виде конического соединения с байонетным замком, электроразъемом и электрокоптактным датчиком стыковки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стыковочное устройство | 1975 |
|
SU543513A1 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ДЛЯ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2191149C2 |
| МАНИПУЛЯТОР ДЛЯ УКЛАДКИ ДОРОЖНЫХ БОРДЮРОВ И ПЛИТКИ | 2024 |
|
RU2837513C1 |
| АКТИВНОЕ УСТРОЙСТВО ФИКСАЦИИ ПОЛЕЗНОГО ГРУЗА ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2014 |
|
RU2583993C2 |
| ОПТИЧЕСКИЙ МИНИСТИК | 2015 |
|
RU2594992C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЕРЧАТКИ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2017 |
|
RU2673406C1 |
| ПАССИВНОЕ УСТРОЙСТВО ФИКСАЦИИ ПОЛЕЗНОГО ГРУЗА ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2014 |
|
RU2583992C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЕРЧАТКИ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ (ВАРИАНТЫ) | 2017 |
|
RU2670649C9 |
| СИСТЕМА РОБОТИЗИРОВАННОЙ СБОРКИ КРУПНОГАБАРИТНЫХ ФЕРМ, В ТОМ ЧИСЛЕ НА ОРБИТЕ ЗЕМЛИ ИЛИ ЛУНЕ | 2021 |
|
RU2790311C2 |
| УСТРОЙСТВО СТЫКОВКИ ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2002 |
|
RU2226483C1 |
.//
:«
т ss{--/fWi I , (||g5; :/ ; x:i -A
Ш /
/ т
7 А V i.
L.
.R--,
-hi,:
53 51
-.J
%
1x1 1-iГ N : € ::.
::.,M. / I
.
