1
Изобретение относится к приборам для воспроизведения подобных кривых или траекторий.
Известен прибор для воспроизведения подобных кривых, содержащий кинематически связанные между собой задающую и исполнительную системы.
Однако с помощью такого прибора можно воспроизводить подобные кривые только в той плоскости, в которой расположена заданная кривая.
Предлагаемый прибор позволяет воспроизводить кривую в плоскости, расположеппой под любым углом к плоскости расположения копируемой кривой.
Для этого в предлагаемом приборе каждая система состоит из двух щарнирно закрепленных и расположенных под углом один к другому гидроцилиндров с поршня.ми одинаковых диаметров, щтоки которых соединены с помощью шарнира, имитирующего центр подобия; кинематическая связь между задающей и исполнительной системами осуществлена с помощью гибких нерастяжимых гидропроводов, соединяющих каждый гидроцилиндр задающей системы с соответствующим гидроцилиндром исполнительной системы. При этом отнощение площадей рабочих полостей гидроцилиндров задающей и исполнительной систем равно отношению расстояния между
центрами щарниров задающей системы к расстоянию между цецтрами щарпиров исполнительной системы.
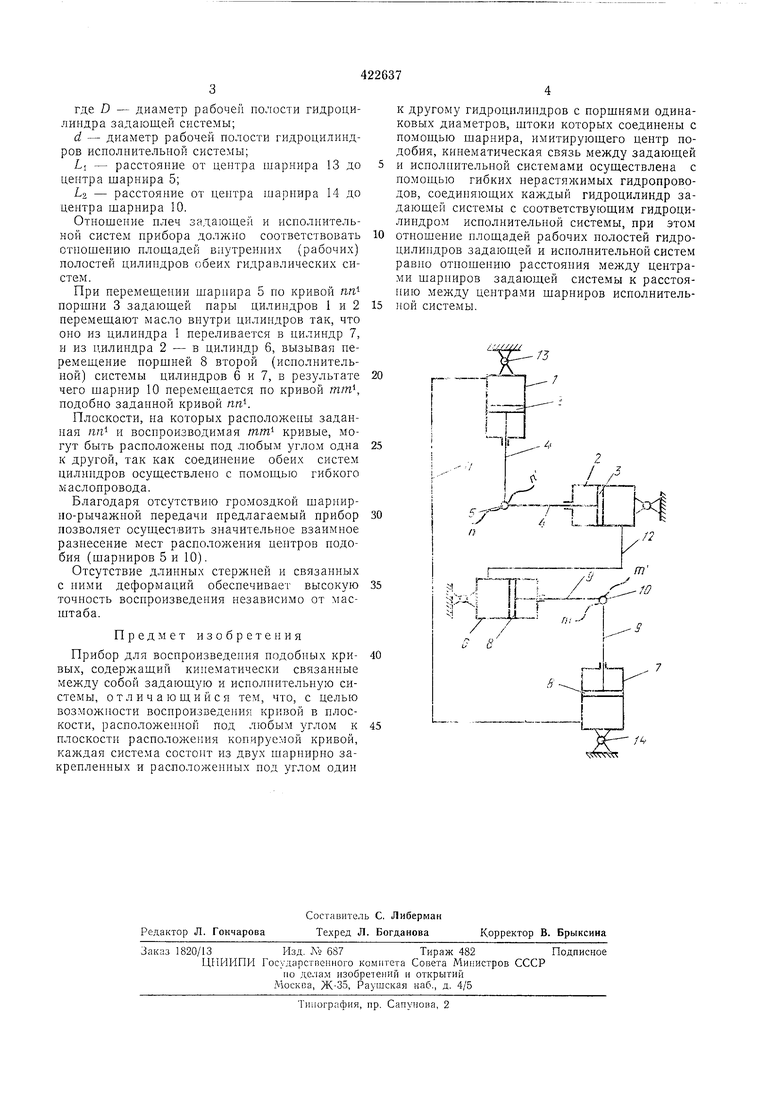
На чертеже изображена схема предлагаемого прибора.
Два щарнирно закрепленных качающихся гидроцилиндра 1 и 2 с поршнями 3 одинакового .диаметра (D) имеют штоки 4, соединенные между собой шарниром 5 (центр подобия). Аналогично первой паре цилиндров c fOlГ;иpoвaнa вторая пара качающихся цилиндров 6 н 7 с порщнями 8 одинакового диаметра (d) н щтоками 9, соединенными между собой щарниром 10, образуя второй центр подобия.
Внутренние полости всех цилиндров заполнены маслом.
Каждый из цилиндров первой пары соединен с соответствующим цилиндром второй пары гибким нерастяжимы.м маслопроводом, рассчитанным на достаточно высокое давление. Цилиндр 1 соединен с цилиндром 7 маслопроводом 11, а цилиндр 2 с цилиндром 6 - маслопроводом 12.
Для воспроизведения центра подобия криBOi, подобной той, по которой перемещается шарнир 5 необходимо обеспечить выполнение условия
/. , лгде D - диаметр рабочей полости гидроцилиндра задающей системы; d - диаметр рабочей полости гидроцилиндров исполнительной системы; LI - расстояние от центра шарнира 13 до центра шарнира 5; LZ - расстояние от центра шарпира 14 до центра шарнира 10. Отношение плеч задаюш,ей и исполнительной систем прибора должно соответствовать 10 отношению площадей внутренних (рабочих) полостей цилиндров обеих гидравлических систем. При перемещении шарнира 5 по кривой п,п порщни 3 задающей пары цилиндров 1 и 2 15 перемещают масло внутри цилиндров так, что оно из цилиндра 1 переливается в цилиндр 7, и из цилиндра 2 - в цилиндр 6, вызывая перемещение поршней 8 второй (исполнительной) системы цилиндров 6 и 7, в результате 20 чего шарнир 10 перемещается по кривой тт, подобно заданной кривой пгеЧ Плоскости, на которых расположены заданная ran ц воспроизводимая тт кривые, могут быть расположены под любым углом одна 25 к другой, так как соединение обеих систем цилиндров осуществлено с помощью гибкого маслопровода. Благодаря отсутствию громоздкой шарнирно-рычажной передачи предлагаемый прибор 30 позволяет осуществить значительное взаимное разнесение мест распо.тожения центров подобия (шарниров 5 и 10). Отсутствие длинных стержней и связанных с ними деформаций обеспечивает высокую 35 точность воспроизведения независимо от масштаба. Предмет изобретения Прибор для воспроизведения нодобных кри- 40 вых, содержащий кинематически связанные между собой задающую и исполнительную системы, отличающийся тем, что, с целью возможности воспроизведения кривой в плоскости, расположенной под любым углом к 45 плоскости расположения копируемой кривой, каладая система состоит из двух щарпирпо закрепленных и расположенных под углом один к другому гидроцилиндров с поршнями одинаковых диаметров, штоки которых соединены с помош,ыо шарнира, имитирующего центр подобия, кинематическая связь между задающей и исполнительной системами осуществлена с помощью гибких нерастяжимых гидропроводов, соединяющих каждый гидроцилиндр задающей системы с соответствующим гидроцилиндром исполнительной системы, при этом отнощение площадей рабочих полостей гидроцилипдров задающей и исполнительной систем равно отношению расстояния между центрами шарниров задающей системы к расстоянию между центрами шарниров исполнительной системы. L
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИБОР ДЛЯ ВОСПРОИЗВЕДЕНИЯ ПОДОБНЫХ КРИВЫХ | 1972 |
|
SU422637A1 |
| Пространственный пантограф | 1977 |
|
SU623713A2 |
| ДВУХКОНСОЛЬНЫЙ ДОЖДЕВАЛЬНЫЙ АГРЕГАТ | 2002 |
|
RU2222184C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ КАНАТОВ КАРЬЕРНОГО ЭКСКАВАТОРА | 2008 |
|
RU2425194C2 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ РАБОЧЕГО ОБОРУДОВАНИЯ БУЛЬДОЗЕРА | 1994 |
|
RU2078177C1 |
| Система автоматического вождения сельскохозяйственного агрегата по заданной траектории | 1991 |
|
SU1817958A1 |
| МНОГОЗВЕННЫЙ ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ ДЛЯ МАСШТАБНОГО КОПИРОВАНИЯ | 1970 |
|
SU270927A1 |
| ЭНЕРГОУСТАНОВКА | 1993 |
|
RU2075635C1 |
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
| Рабочий орган одношпиндельной шнекобуровой машины | 1977 |
|
SU699165A1 |
