Изобретение относится к машиностроению, а нменно к устройствам, предназначенным,дня пространс-гееиного копирования, например, при фрезерных работах, и может быть использовано в деревообрабатывакяцей промышленности в конструкциях фрезерно-копнровальных станков, а также в качестве манштулятора.
По основному авт.св. № 417266 известен пространственный пантограф, содержащий кинематически связанные между собой задающую и исполнительную группы выполненные в виде трех шарнирных анлиндров, расположенных во взаимно перпендикулярных направлениях, рабочие полости .которых, находящиеся на однонменШ 1Х осях, соединены маслопроводами, причём отношение плеч шарниров от точки крепления цилиндров до соответствуюпшх центров подобия выполнено равным отношению рабочих полостей цилиндров задающей и исполнительной групп.
Недостатком пантографа является нвзкая точность копирования утечек масла через уплотнения поршней в онлиндрах. Кроме того, при копировании отсутствует идентичность перемещения штоков и групп цилиндров задакнцей и исполнительной систем (так при движении, центра подобия задакиией системы в сторону шарнирного закрепления цилиндров, центр подобия исполнительной системы движется в сторону, противоположную шарнирному закреплению цилиндров исполнительной системы), Это связано с тем, что при втягива1ши штоков в цилиндры зада данлд системы штоки цилиндров исполнительной системы выходят из цилиндров.
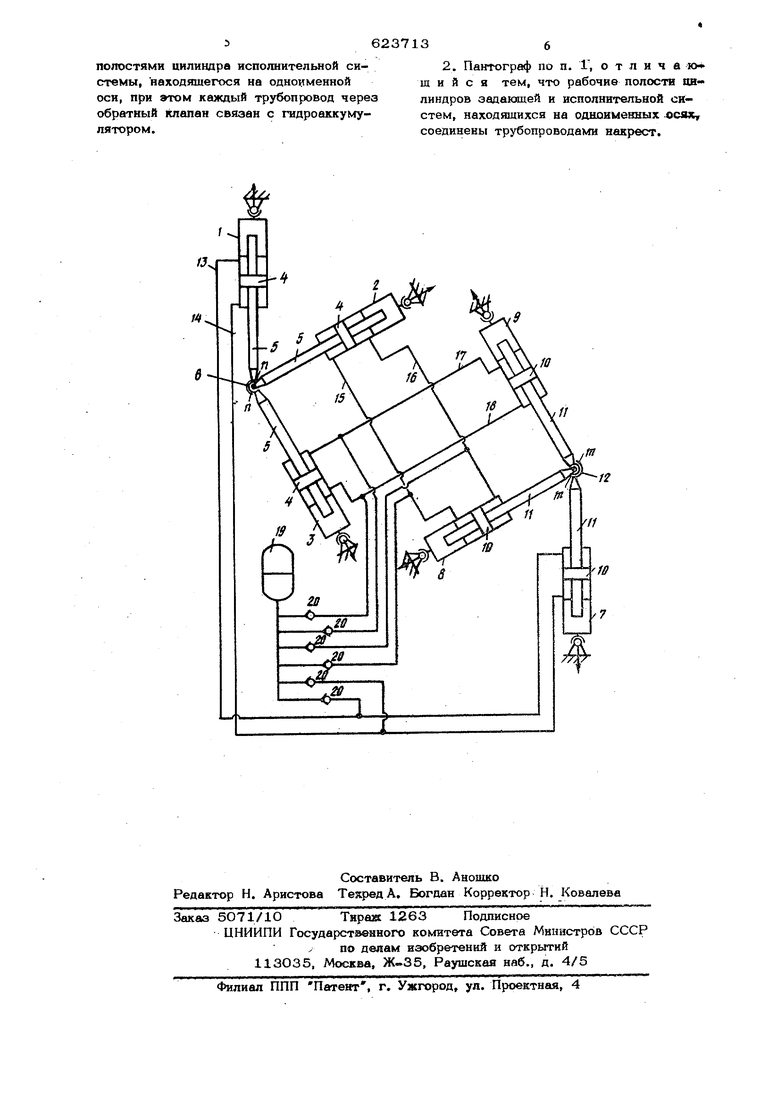
Отсутствие идентичности перемещения в работе двух систем в случае значительного разнесения «центров подобия при- рас положении в этих центрах щупа и фрезы при объемном копировании затрудняет работу, так как оператор, копируя изделие щупом, расположенным в центре подобия задающей cncTeMbij не может проконтролировать зону перемещения цилиндров и штоков, связанных с инструментом, расположенным в центре подобия исполнительной системы. Это может привести к аварийрнйаой ситуации н поломкам инструмента Келью изобретения является повышение точности копирования. Для этого цилиндры задающей и испол нительной систем выполнены с двухстороннимн штоками, причем обе рабочие по- льсти каждого из цилиндров задающей системы соединены маслопроводами с пс постями соответствующего ему и распоЯожевного по одноименной оси цилиндра исполнительной системы, а каждый из маслопроводов связан через обратный клапан с аккумулятором. ; Для достижеЮ1Я идентичности переме прений групп цилиндров задающей и испогагительной систем рабочие полости цилинаров, находящихся на одноименных осях, соединены маслопроводами накрест. Маяичие в пантографе аккумулятора,, сйязааного обратными клапанами с масло проводами,, а через них и с рабочими погпостями групп цилиндров задающей и ис- полпнтельной систем позволит компенси- ровать и поддерживать в каждой из п-щросистем, включающей маслопровод и полости цилиндров обеих систем, пос тЬяиное давление. На чертеже изображена cxe предлагаемого пантографа. Три шаршфно закрепленных цил1шдр«| If2 н 3 с двухсторонними щтоками, paciпойОйсенных во взаимно- перпенднкуларны с направлениях с поршнями 4 одинакового диаметра и штоками 5, соединены собой шарниром 6 (центр подобия) и об- разуют задающую cHCTeNfy цилиндров, Аншюгрсчно первым трем цилиндрам смонтированы три вторых шарнирно закрепленных с двухсторонними штоками цилнвдра ;}7,8 и 9, расположенных также во взаимно перпендикулярных направле.ниях, с поршнями 1О одинш ового диаметра и штоками 11, которые соединешл методу собой шарниром 12, образуя вто-:роЙ ueffrp йодобия испо№1ительной систем
Внутрейние полости всех цилиндров заполнены маслом. 1Полости цилиндров, находйшихся на одноименных осях, свяЗШ1Ы маслолроводами 13-18, причем каждый из маслопроводов соединяет накрест лежащие полости цншшдров. Так маслопроводы 13, 16, 18 соединяют полости /шшшщров 1, 2 и 3f расположенные со стороны шартгириого зшсреплешш цил Шдров, с полостями цилиндров 7, 8 и 9, расположенными. со стороны
Формула изобретения
1. Пространственный пантограф по авт.св. № 417266, отличающийс я тем, что, с целью повыщения точности копирования, цилиндры задающей и исполнительной систем выполнены с двухсторонними щтоками, обе рабочие полости каждого из цилиндров задающей системы соединены маслопроводами с шарнирного соединения щтоков 11, т.е. со стороны центра подобия (щарнира) iZ. Маслопроводы 14, 15 и 17 соединяют полости цилиндров 1, 2 и 3, расположенные со стороны щарнирного соединения щтоков 5 (со стороны центра подобия 6), с полостями цилиндров 7, 8 и 9, расположенными со стороны шарнирного закрепления цилиндров. Для поддержания постоянным давления в маслопроводах 13-18 .и связанных с. ними соответствующих полостях цилиндров имеется гидроаккумулятор 19, соединенный с маслопроводами через обратные клапаны 20. Работа патлтогрефа осуществляется следующим образом. При перемещении центра подобия {щарнира) 6 по пространственной кривой h-H порщни группы цилиндров 1, 2 и 3 задающей системы перемещают масло внутри цилиндров так, что оно из одной полости цилиндра 1 начинает переливаться в соединенную с ней полоегь цилиндра 7, и наоборот, из- другой полости цилиндра 7 масло переливается в соответствующую ей полость цилиндра 1. Согласно копируемой пространственной кривой h h масло также соответствующим образом будет переливать он в полостях цилиндров 2 и 8 и 3 и 9, вызывая перемещение щтоков 11с поршнями 10 группы дклшщров 7, 8 и 9 исполнительной системы, в результате чегс центр подобия (щарнир) 12 будет перемещаться в пространстве по кривой (п- tti подобно заданной кривой П-и . Обратные клапаны 20 настраиваются на одно и то же давление. В случае утечек и падения давления в какой-либо из закрытых гидросистем срабатывает соответствующий обратный клапан, и масло из I аккумулятора 19 поступает в соответствующую систему. Для нормальной работы пантографа необходимо периодически производить подзарядку аккумулятора. полостями цилиндра исполнительной системы, находящегося на одноименной оси, при этом каждый трубопровод через обратный клапан связан с гидроаккумулятором. 6 36 2. Пантограф по п. Г, о т л и ч а кн щ и и с я тем, что рабочие полости цилиндров задающей и исполнительной систем, находящихся на одноименных осянц соединены трубопроводами накрест.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИБОР ДЛЯ ВОСПРОИЗВЕДЕНИЯ ПОДОБНЫХ КРИВЫХ | 1971 |
|
SU423637A1 |
| ПРИБОР ДЛЯ ВОСПРОИЗВЕДЕНИЯ ПОДОБНЫХ КРИВЫХ | 1972 |
|
SU422637A1 |
| Ботворез | 1959 |
|
SU125435A1 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| Следящая система автоматического управления | 1956 |
|
SU118342A1 |
| Гидравлический привод | 1971 |
|
SU661161A1 |
| Система автоматического вождения сельскохозяйственного агрегата по заданной траектории | 1991 |
|
SU1817958A1 |
| Манипулятор с ручным управлением | 1983 |
|
SU1129067A1 |
| ГИДРАВЛИЧЕСКИЙ ДВУХНИТОЧНЫЙ ПУТЕПОДЪЕМНИК | 1965 |
|
SU168745A1 |
| СВЕРХЛЕГКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ВЕРТИКАЛЬНОЙ ПОСАДКИ (ЕГО ВАРИАНТЫ) | 2003 |
|
RU2246427C1 |
10
10
