1
Изобретение относится к подъемно-трансnopTHOMv машиностроению, а именно к устройства.ч для управления гидроприводами механизмов крана, и может быть использовано для управления механизмами передвижения крана мостового типа.
Известно устройство для управления гидроприводами механизмов передвижения крана мостового типа, содержащее командоаппарат, кинематически связанный с сельсин-датчиком, который электрически соединен с сельсин-приемником, а также исполнительный двигатель, который через усилитель подключен к выходу сельсинприемника и через лекало кинематически связан с ротором сельсин-приемника 1.
Недостатком известного устройства является сравнительно низкое качество управления.
Цель изобретения - повышение качества управления за счет уменьшения динамических ударов.
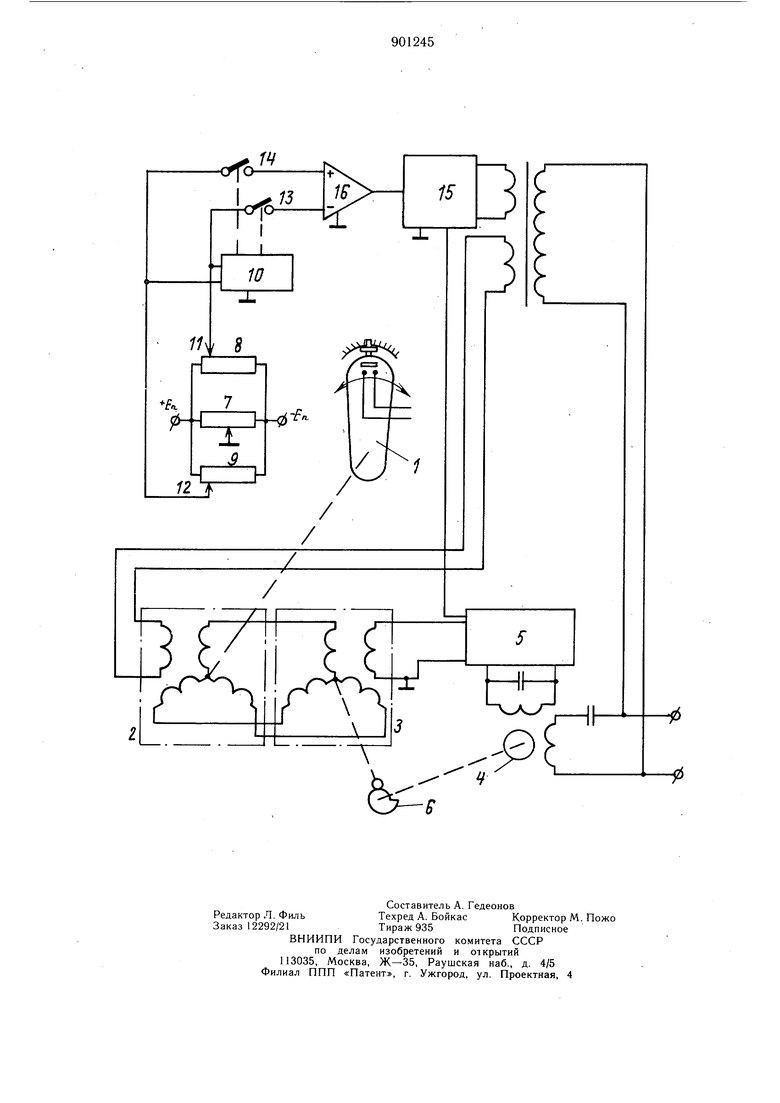
Указанная цель достигается тем, что устройство снабжено задатчиком давления в гидроприводе, датчиками давления в гидроприводе, подключенными вместе с задатчиком давления по мостовой схеме, пороговым элементом, вход которого подсоединен к выходам мocfoвoй схемы, ключами, управляющие входы которых соединены с выходами порогового элемента, и модулятором, входы которого через ключи подсоеди5 нены к выходам мостовой схемы, а выход модулятора соединен со, входом усилителя. На чертеже изображена функциональная схема устройства.
Устройство для управления гидропризо,Q дами механизмов передвижения крана мостового типа содержит командоаппарат 1, кинематически связанный с сельсин-датчиком 2, который электрически соединен с сельсин-приемником 3, а также исполнительный двигатель 4, который через усилитель 5 подключен к выходу сельсинприемника 3 и через лекало 6 кинематически связан с ротором сельсин-приемника 3. Задатчик 7 давления в гидроприводе и датчики 8 и 9 давления в гидроприводе подключены вместе по мостовой схеме. Вход
20 порогового элемента 10 подключен к выходам 11-и 12 мостовой схемы. Ключи 13 и 14 подсоединены между выходами 11 и 12 мостовой схемы и модулятором 15. Управляющие входы ключей 13 и 14 (не показаны) соединены с выходами порогового элемента 10. Вход модулятора 15 подсоединен ко входу усилителя 5. Устройство может быть снабжено операционным усилителем 16, включенным между ключами 13 и 14 и входом модулятора 15. Устройство для управления гидроприводами механизмов передвижения крана мостового типа работает следующим образом. При отклонении ручки командоаппарата 1 поворачивается связанный с ней ротор сельсин-датчика 2, что приводит к рассогласованию положений роторов сельсин-датчика 2 и сельсин-приемника 3. На входе усилителя 5 возникает сигнал. Усиленный в усилителе 5 сигнал подается на обмотки управления двигателя 4, приводя его во вращение. Возникающее при этом в гидросистеме давление в зависимости.от направления вращения двигателя 4 вызывает разбалансировку напряжения в схеме датчика 8 давления или в схеме датчика 9 давления, обеспечивая тем самым обратную связь между частотой вращения двигателя 4 и изменением давления в гидросистеме. , Задающее устройство 7 определяет оптимальное давление в гидросистеме, увеличение дав ления в гидросисте.ме приводит к уменьшению напряжения, снимаемого с моста. При уменьшении напряжения до нуля, т. е. когда давление в системе достигает оптимального значения, срабатывает пороговый элемент 10, замыкающий ключ 13 и 14 соответственно, разрещая тем самым прохождение сигнала с укзанного моста на модулятор 15 через операционный усилитель 16. Операционный усилитель 16 усиливает полученный сигнал и с соответствующей полярностью подает его на модулятор 15, где он преобразуется в напряжение с промышленной частотой (50 Гц) и подается на усилитель 5. Усиленный в усилителе 5 сигнал подается на обмотки управления двигателя 4, который в зависимости от полярности и величины сигнала изменяе-т скорость или направление своего вращения. С помощью лекала 6 угол рассогласования между рото- рами сельсин-датчика 2 и сельсин-приемника 3 сводится до нуля. При этом элемент 10 размыкает ключ 13 или 14, и кран двигается с заданной скоростью и в заданном направлении. Наличие обратной связи между частотой вращения двигателя и измерением давления в гидросистеме позволяет благодаря введению датчиков давления и задающего устройства, установленных в гидросистеме крана, увеличить долговечность и надежность крана. Формула изобретения Устройство для управления гидроприводами механизмов передвижения крана мостового типа, содержащее командоаппарат, кинематически связанный с сельсин-датчиг ком, который электрически соединен с сельсин-приемником, а также исполнительный двигатель, который через усилитель подключен к выходу сельсин-приемника и через лекало кинематически связан с ротором сельсин-приемника, отличающееся тем, что, с целью повышения качества управления за счет уменьщения динамических ударов, оно снабжено задатчиком давления в гидроприводе, датчиками давления в гидроприводе, подключенными вместе с задатчиком давления по мостовой схеме, пороговым элементом, вход которого подсоединен к выходам мостовой схемы, ключами, управляющие входы которых соединены с выходами порогового элемента, и модулятором, входы которого через ключи подсоединены к выходам мостовой схемы, а выход модулятора соединен со входом усилителя. Источники инфор.мации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 424802, кл. В 66 С 13/42, 17.09.71 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления гидроприводами механизмов передвижения крана мостового типа | 1980 |
|
SU901241A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАЗДЕЛЬНЫМИГИДРОПРИВОДАМИ МЕХАНИЗМА ПЕРЕДВИЖЕНИЯМОСТОВОГО КРАНА | 1971 |
|
SU424802A1 |
| Устройство синхронизации механиз-MOB пЕРЕдВижЕНия KPAHA | 1978 |
|
SU798021A1 |
| Устройство управления гидроприводом механизма крана | 1989 |
|
SU1724956A1 |
| Устройство для управления приводами передвижения опор крана мостового типа | 1982 |
|
SU1087453A1 |
| Способ управления гидроприводом механизма крана | 1983 |
|
SU1197983A1 |
| Система управления гидропривода лебедок сдвоенного крана | 1989 |
|
SU1784569A1 |
| Устройство для управления гидроприводом механизма перемещения рабочего органа крана | 1983 |
|
SU1209585A1 |
| Мостовой кран для обслуживания алюминиевых электролизеров | 1983 |
|
SU1148905A1 |
| Измеритель углового рассогласования и его производной для следящих систем | 1975 |
|
SU600518A1 |