1
Изобретение относится к подземнотранспортному машиностроению, а именно к устройствам для ограничения перекоса кранов.
Известно устройство для синхронизции механизмов передвижения крана, содержащее сельсин-датчик и сельсинприемник, а также коммутирующее устройство iQ .
Известно также устройство для синхронизации механизмов передвижения крана, содержащее сельсин-датчик и сельсин-приемник, связанные с колесами механизмов передвижения, коммутирующее устройство, фазочувствительны выпрямитель, соединенный с однофазной обмоткой сельсин-приемника и схемой управления приводом, а также датчики контроля перекоса и узел фиксации рассогласования механизмов pj .
Недостатком известных устройств является сравнительно низкая надежность.
Цель изобретения - повь&иение надежности устройства.
Указанная цель достигается тем, что устройство снабжено редуктором и дифференциальным сельсином, электрически соединенным с сельсин-датчиком и сельсин-приемником и кинематически связанным с редуктором, а также тахогенераторами, кинематически связанными с соответствующими механизмом передвижения и электрически соединенными с соответствующим датчиком контроля перекоса и узлом фиксации рассогласования механизмов, и серводвигателем, который кинематически связан с редуктором и соединен
0 через коммутирующее устройство с узлом фиксации рассогласования механизма.
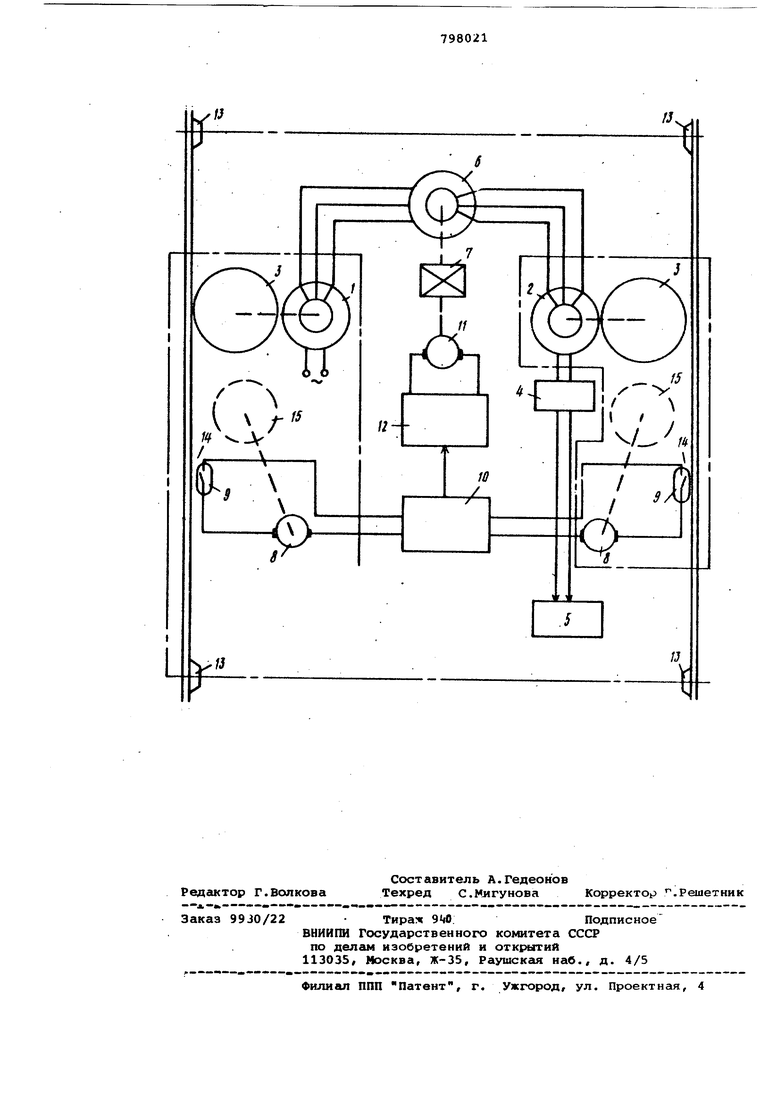
На чертеже изображена функциональная схема устройства.
5 Устройство синхронизсщии механизмов передвижения крана содержит сельсин-датчик 1 и сельсин-приемник 2, связанные с колесами 3 механизмов передвижения, Фазочувствительный
0 выпрямитель 4 соединен с однофазной обмоткой сельсин-приемника 2 и схемой 5 управления приводом. Дифференциальный сельсин 6 электрически соединен с сельсин-датчиком 1 и сель5 син-приемником2 и кинематически связан с редуктором 7. Тахогегераторы 8 кинематически связаны с соответствующим механизмом передвижения и электрически соединены -с соответствующим датчиком 9 контроля перекоса и узлом 10 фиксгищи рассогласования механизмов.
Серводвигатель 11 кинематически связан с редуктором 7 и соединен через коммутирующее устройство 12 с узлом 10. Датчики 9 контроля перекоса могут быть выполнеж в виде упоров 13 расположенных вдоль пути крана, и коммутаторов 14, например герконов.
На чертеже показана связь тахогене раторов 8 с двигателями 15 механизмов передвижения.
Устройство синхронизации механизмов передвижения крана работает следующим образом.
Механизмы передвижения крана передвигаются по рельсовому пути, при этом ходовые колеса 3 вращают роторы сельсинов 1 и 2. Если кран движется без перекоса, то коммутаторы 14 датчиков 9 контроля перекоса при прохождении упоров 13 на пути движения крана замыкаются одновременно. Синхронное замыкание коммутаторов 14 не вызывает изменения исходного состояния коммутирующего устройства 12, серводвигатель 11 при этом обесточен и неподвижен. Серводвигатель 11 и ротор дифференциального сельсина б неподвижны. Выходное напряжение сельсинной схемы, соответствующее углу рассогласования между колесами 3 после преобразования в фазочувствительном выпрямителе 4 поступает на схему 5 управления привО дом.
Если кран приходит к упору 13 с фактическим перекосом и при отсутствии рассогласования ходовых колес 3 то ошибка системы синхронизации компенсируется следующим образом.
Коммутатор 14 соответствующего датчика 9 контроля перекоса замыкает цепь соответствукадего тахогенератора 8, присоединенную к узлу 10 фиксации рассогласования. Напряжение тахогенератора 8, пропорциональное скорости передвижения крана, подается на вход узла 10 фиксации рассогласования. .
В течение интервала времени от момента замыкания одного коммутатора 14 до момента замыкания второго коммутатора 14 узлом 10 фиксации рассогласования ведется интегрирование напряжения тахогенератора 8.
Устройство 12 прикладывает к якорю серводвигателя 11 напряжение, пропорциональное напряжению на интеграторе 10 и в течение определенного фиксированного промежутка времени.
Серводвигатель 11, вращаясь,.проворачивает ротор дифференциального сельсина 6 таким образом, чтобы компенсировать погрешность, вызываквду перекос крана, при синхронном вращении ходовых колес 3.
Получающийся в результате поворота ротора дифференциального сильсина б сигнал синхронизации на выходе фазочувствительного выпрямителя передвижения для коррекции движения крана.
Формула изобретения
Устройство синхронизации механизмов передвижения крана, содержащее сельсин-датчик и сельсин-приемник, связанные с колесаки механизмов передвижения, ко1«а«утирующее устройство, фазочувствительный выпрямитель, соединенный с однофазной обмоткой сельсин-лриемника и схемой управления гфиводрм, а также датчики контроля перекоса и узел фиксации рассогласований механизмов, отличающееся тем,что, с целью повышения надёжности, оно снабжено редуктором и дифференциальным с.ельсином, электрически соединенным с сельсин-датчиком и сельсин-приемником и кинематически связанным с редуктором, а такж тахогенераторами, кинематически связанными с соответствугацими механизмам передвижения и электрически соединенными с соответствующим датчиком контроля перекоса и узлом фиксации рассогласования механизмов, и серводвигателем, который кинематически связан с редуктором и соединен через коммутирунзщее устройство с узлом фиксации рассогласования механизма.
Источники информбщии принятые во внимание при экспертизе
1.Авторское свидетельство СССР
155919, кл. В 66 С 13/18, 05.07.62
2.Авторское свидетельство СССР по заявке 2585213/11, кл.В 66 С 9/16, 01.03.78 (прототип).
5 X V
У V/,
-./L
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство синхронизации механизмов передвижения крана | 1979 |
|
SU897700A1 |
| Устройство для синхронизации механизмов передвижения крана | 1984 |
|
SU1253939A1 |
| Система управления гидропривода лебедок сдвоенного крана | 1989 |
|
SU1784569A1 |
| Устройство для управления дизелем | 1987 |
|
SU1449684A1 |
| Устройство для синхронизации работы питателя и стеклоформующей машины | 1980 |
|
SU958339A1 |
| Электромеханическое устройство управления летучими ножницами | 1971 |
|
SU473574A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАЗДЕЛЬНЫМИГИДРОПРИВОДАМИ МЕХАНИЗМА ПЕРЕДВИЖЕНИЯМОСТОВОГО КРАНА | 1971 |
|
SU424802A1 |
| Устройство синхронизации механизмов передвижения крана | 1973 |
|
SU483337A1 |
| Устройство синхронизации механизмов передвижения крана | 1978 |
|
SU680978A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ | 1964 |
|
SU166943A1 |
/J
/J
