1
Изобретение относится к строительному и дорожному машиностроению, а именно к системам управления рабочими органами землеройно-транспортных машин.
Известны системы управления рабочими органами землеройно-транснортных машин, содержаш,ие силовой гидроцилиндр, соединенный с механизмами управления рабочим органом, золотник и рычаг управления.
Цель изобретения - повышение точности системы управления.
Это достигается тем, что на штоке золотника установлена шестерня с возможностью новорота ее на оси, соединенная с зубчатыми рейками, одна из которых кинематически соединена с рычагом управления, а другая - с механизмом подъема рабочего органа.
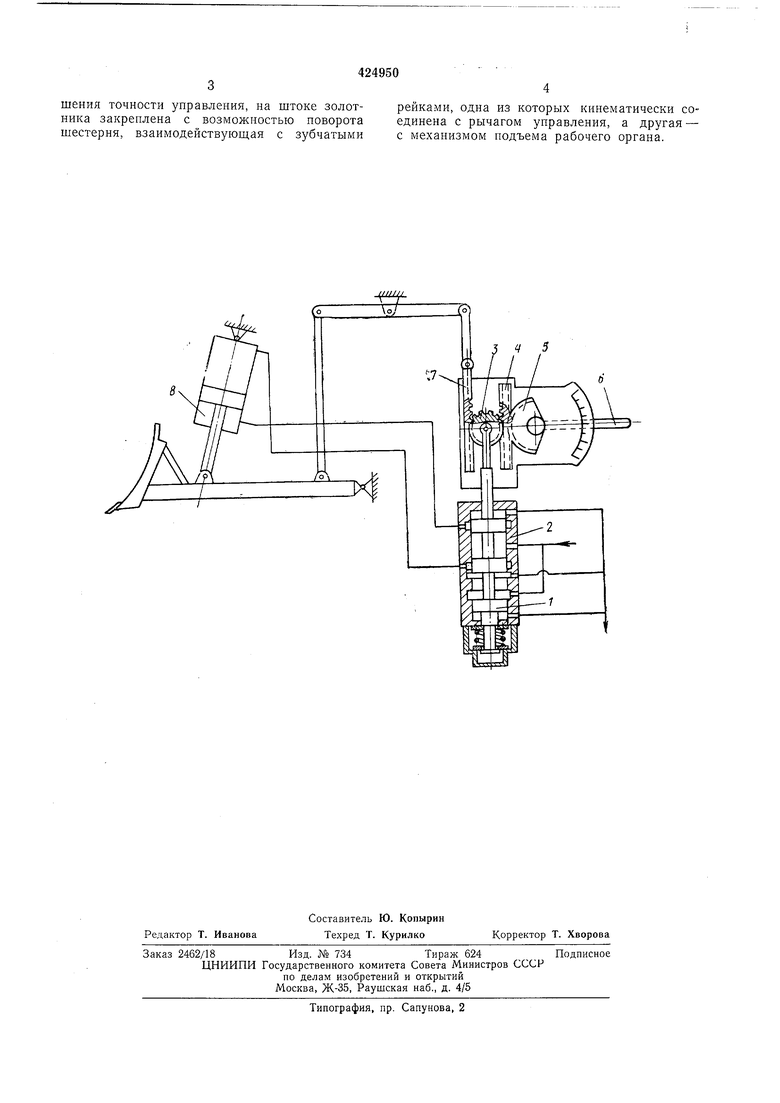
На чертеже изображена конструктивная схема предлагаемой системы управления.
Золотник 1, находяпдийся в неподвижном корпусе 2 распределителя, соединен с шестерней 3, которая соединена с подвижной рейкой 4 и через зубчатый сектор 5 связана с рукояткой управления 6. Другая рейка 7, на.ходяшаяся в зацеплении с шестерней 3, кинематически соединена при помощи механизмов обратной связи с рабочим органом, управляемым гидроцилиндром 8.
Положение рабочего органа машины по высоте относительно опорной поверхности ходового оборудования определяется по шкале указателя.
Подъем рабочего органа происходит следуюшим образом. При перемешении рукоятки управления 6 вверх по шкале указателя рейка 4 и связанные с ней шестерня 3 и золотник 1 перемещаются вниз. При этом рейка 7 и рабочее оборудование неподвижны.
Вследствие открытых окон золотника начинается опускание рабочего органа и приходят в движение механизмы обратной связи и рейка 7.
Рабочий орган опускается только при перемещении рукоятки управления. В момент остановки рукоятки управления рейка 4 становится неподвижной, а рейка 7, продолжая свое движение вверх, при помощи щестерни 3 закрывает окна золотника. Интенсивность торможения рабочего органа зависит от величины коэффициента обратной связи.
Предмет изобретения
Следящая система управления рабочим органом, включающая силовой цилиндр, соединенный с механизмом нодъема рабочего органа, золотник со штоком и рычаг управления, отличающаяся тем, что, с целью новышения точности управления, на штоке золотника закреплена с возможностью поворота шестерня, взаимодействуюш,ая с зубчатыми
рейками, одна из которых кинематически соединена с рычагом управления, а другая - с механизмом подъема рабочего органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система управления рабочим органом | 1985 |
|
SU1293287A1 |
| Система управления рабочим органом землеройно-транспортных машин | 1973 |
|
SU565978A1 |
| Следящая система управления рабочим органом землеройной машины | 1982 |
|
SU1074975A2 |
| ЗЕМЛЕРОЙНАЯ МАШИНА | 1991 |
|
RU2046890C1 |
| Круглопильный станок для продольной распиловки древесины | 1990 |
|
SU1720859A1 |
| Устройство для демонтажа футеровки алюминиевых электролизеров | 1981 |
|
SU1011736A1 |
| Следящая система управления рабочим органом землеройной машины | 1981 |
|
SU962483A1 |
| ПРИВОД РАБОЧЕГО ОРГАНА ЗЕМЛЕРОЙНО-ТРАНСПОРТНЫХМАШИН | 1971 |
|
SU294914A1 |
| САМОЛЕТ В.С.ГРИГОРЧУКА | 1997 |
|
RU2123960C1 |
| Устройство управления рабочим органом землеройной машины | 1987 |
|
SU1463878A1 |