Известен нривод рабочего органа землеройно-транспортных машин, например бульдозера, включающий силовой цилиндр, золотник, трубопроводы и механизм управления с корпусом. Однако такой привод не обеспечивает четкую фиксацию положения рабочего органа на новерхности грунта.
Предлагаемый привод не имеет этого недостатка и отличается от известного тем, чтокорпус механизма управления выполнен со стаканом, имеющим возможность перемещения относительно корпуса. В корпусе и стакане соосно установлены пружины.
Пружины могут быть установлены в корпусе механизма управления с предварительным натягом.
Изобретение поясняется чертежом.
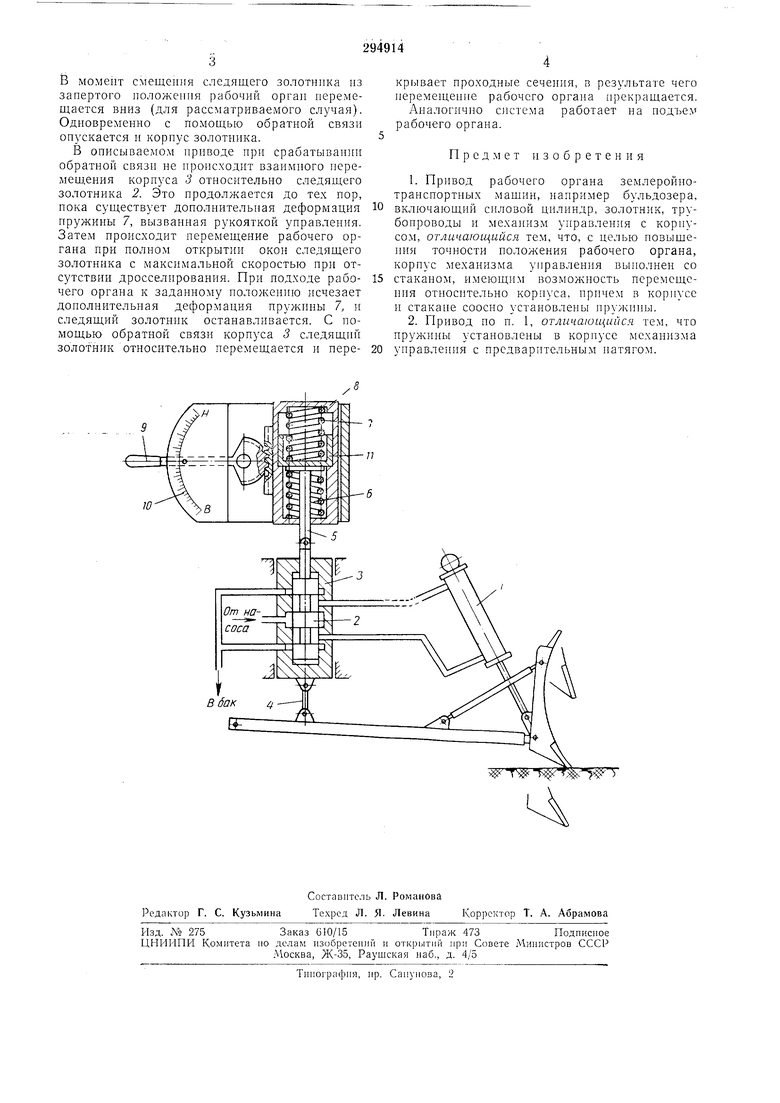
Гидроцилиндр 1, который приводит в движение рабочий орган, управляется следящим золотником 2, корпус 3 которого выполнен подвижным и соединен с рабочим органом при помощи обратной связи 4.
Следящий золотник штоком 5 соединен с механизмом управления. Последний включает в себя пружины 6 VL 7, установленные с предварительным натягом в подвижном корпусе 8, рукоятку управления 9 с зубчатым сектором и указатель 10 высоты положения рабочего органа. С целью обеспечения четкой фиксации положения рабочего органа на поверхности.
грунта 7 помещена в подвижный стакан 11, ограничивающий расширение иружины.
Привод работает следующим образом. 5 В пололсении «О рукоятки управления 9 рабочий орган располагается на поверхности грунта ровной площадки. Следящий привод может работать в режиме непрерывных перемещенпй рукоятки, как в известных системах,
0 а также, благодаря особенностям конструкции
механизма управлен я, допускает мгновенное
перемещение рукоятки из одного положения
в другое.
Для заглубления рабочего органа на требуемую величину рукоятку управления 9 необходимо переместить вверх ио шкале указателя 10 в соответствующее положение. В начальный момент перемещенпя рукоятки 9 с помощью зубчатой передачп одновременно перемещается подвижный корпус 8, щток 5 и следящий золотник 2. Одиако следящий золотник молсет перемещаться до тех пор, пока не упрется торцом в корпус 3.
При дальнейшем движении рукоятки управления следящпй золотник и шток неподвижны, пружина 7, установленная с нредварительным натягом, сжимается. После фиксирования рукоятки управления в новом положении она может быть опущена. Рука оператора освоВ момент смещения следящего золотника нз запертого ноложення рабочнй орган неремещается вниз (для рассматриваемого случая). Одновременно с номощыо обратной связи опускается и корпус золотника.
В описываемом приводе при срабатывании обратной связн не происходит взанмного перемеш,ения корпуса 3 относительно следящего золотника 2. Это продолжается до тех пор, пока существует дополнительная деформация пружины 7, вызванная рукояткой управления. Затем происходит перемещение рабочего органа при полном открытии окон следящего золотника с макснмальной скоростью при отсутствии дросселирования. При подходе рабочего органа к заданному ноложенню исчезает донолнительная деформация пружины 7, и следящий золотник останавливается. С помощью обратной связн корнуса 3 следящнй золотник относительно перемещается и перекрывает проходные сечепия, в результате чего перемещеппе рабочего органа прекращается. Аналогично система работает на подъем рабочего органа.
Предмет изобретения
1.Прнвод рабочего органа землеройнотранспортпых мащин, например бульдозера, включающнй снловой цнлнндр, золотник, трубопроводы и механизм управления с корпусом, отличающийся тем, что, с целью повыщепия точности положения рабочего органа, корпус механизма управлення вынолнен со стаканом, имеющим возможность перемсп епия относптельно корпуса, нрпчем в корпусе и стакапе соосио установлены пружппы.
2.Привод по п. 1, отличающийся тем, что пружины установлены в корпусе механнзма управления с предварительным иатягом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система управления рабочим органом | 1985 |
|
SU1293287A1 |
| Манипулятор | 1972 |
|
SU446411A2 |
| Следящий привод | 1986 |
|
SU1380932A1 |
| РЕЗЬБОТОКАРНЫЙ ПОЛУАВТОМАТ С НЕРЕВЕРСИВНЫМ ШПИНДЕЛЕМ | 1969 |
|
SU241904A1 |
| Распределительное устройство | 1980 |
|
SU1099180A1 |
| БИБЛИОТЕКА i | 1972 |
|
SU358149A1 |
| Манипулятор | 1975 |
|
SU529072A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМПРЕССОМ | 1967 |
|
SU200437A1 |
| Рулевое управление трактора | 1984 |
|
SU1221002A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМе-с?;сою:^;^*^- • bATEM^a^aiiH^i^- Щ ""^ &и&лиот^и.л^^ | 1973 |
|
SU374161A1 |
