1
Изобретение относится к системам автоматического регулирования и может быть использовано в электрогидравлических импульсных системах с широтно-импульсной модуляцией.
Известны релейные гидроусилители, содержащие сумматор-модулятор, золотник с осевым зазором, управляющие камеры которого подключены к соплам, заслонки с четырьмя рылейными приводами, дроссели, каналы слива и подвода рабочего тела.
Однако в известных гидроусилителях существуют возможности возникновения кавитации, непроизводительного расхода рабочего тела, что приводит к опасности возникновения резонанса на частотах колебаний обьекта как упругого тела.
В предлагаемом гидроусилителе для устранения резонанса на частотах колебаний объекта заслонки установлены в каналах слива, входы двух релейных приводов заслонок соединены с выходами сумматора-модулятора, выход - с соответствующими входами двух других релейных приводов-заслонок, а управляющие камеры золотника подключены к дросселям через осевой зазор.
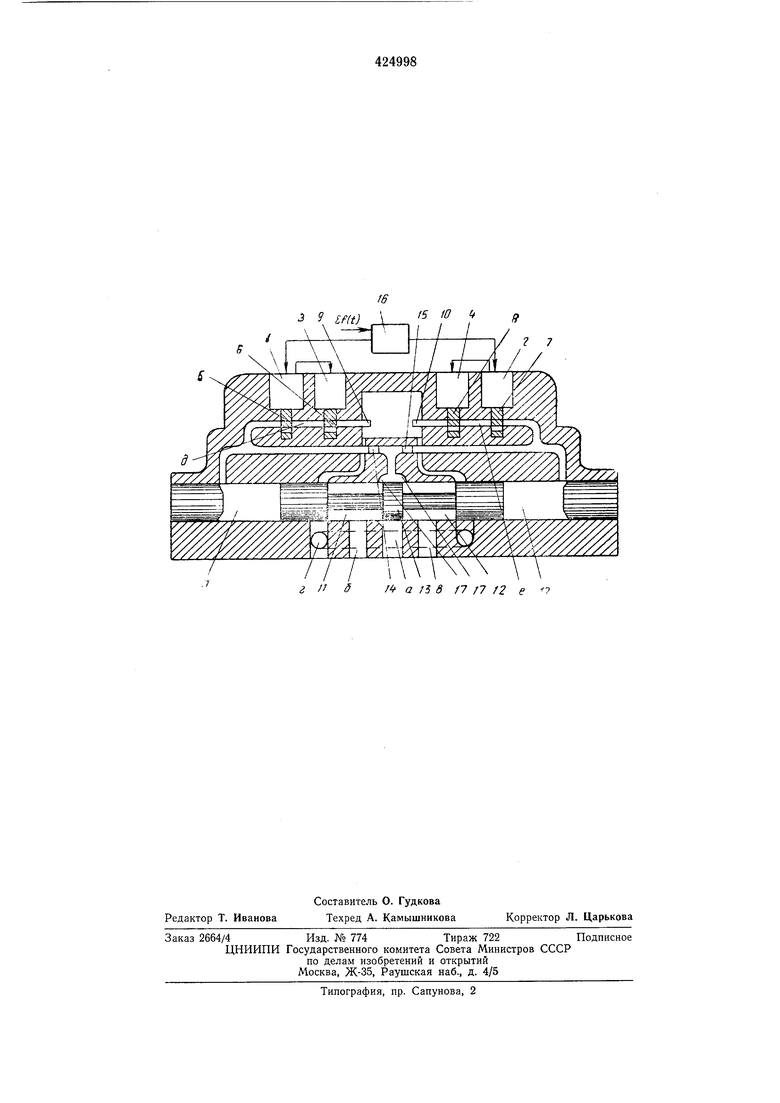
На чертеже изображено предлагаемое устройство.
Устройство содержит релейные приводы 1 - 4 заслонок; заслонки 5-8; сопла 9 п 10; управляющие камеры 11 п 12; канал а для подвода рабочего тела; каналы б и в для подвода питания к силовому механизму (на чертеже не показан); канал г для слива рабочего тела; золотник 13; дроссели 14 и 15; сумматормодулятор 16; каналы дне для подвода жидкости к соплам 9 п 10, осевой зазор золотпика 17.
Питапие релейных приводов 1 и 2 осуществляется от модулятора, который одновременно служит сумматором командного напряжения и напряжения обратной связи, а релейных приводов 3 п 4-от источника постоянного напряжения через контакты релейных прпводов 1 и 2. Причме время запаздывания в срабатывании релейных прпводов выбирается таким образом, чтобы выполнялось условие
, Г
3 (3,4) -3(1,2) Г -3 (1,2)
где тз(з,-,) - запаздывание в срабатывании релейных приводов 3 и 4; тз(1,2) - запаздывание в отнускании релейных прпводов 1 п 2;
Т период модулирующего сигнала ирямоугольной формы.
Еслп
- ТЗ(|,2), ТО Т3(3,4) Т3(1,2)Допускают, что в момепт включения гпдроусилителя под напряженпе командное напряжение и напряжение обратной связи отсутствуют, а напряжение в форме прямоугольных импульсов соответствующей полярности подается на релейные приводы 1 и 2.
Считают, что при t О подан (-f) импульс длительности 7/2 на релейный привод 1. Через промежуток времени тз он срабатывает и замыкает цепь питания релейного привода 2. Однако перемещение золотника происходить не будет, так как перекрыт слив жидкости через сопло 9.
Через отрезок времени1- тз срабатыва
ют релейные нриводы 2 и 3 (на релейный привод 2 был подан (-) импульс через отрезок времени / Т/2) и отпускает релейный привод 1. Однако н в этом случае перемещение золотника происходить не будет, так как перекрыт слив жидкости и через сопло 9 и через сопло 10. В дальнейшем процесс повторяется.
Таким образом, при отсутствии командного напряжения и напряжения обратной связи золотник находится в нейтральном положении, а расхода жидкости и колебаний исполнительного органа нет. Колебания локализованы в контуре гидроусилителя.
Гидроусилитель не имеет перекрытия, а введение осевого зазора 17, обеспечивающего доступ жидкости из управляющих (рабочих) камер 11 и 12 гидроусилителя к дросселям 14 и 15 при нейтральном положении золотника, не ухудщает статических и динамических свойств гидроусилителя. Это достигнуто установкой двух заслонок 5, 6 и 7, 8, соединенных с релейными приводами 1, 3 и 2, 4, в каждый из каналов д, е для подвода жидкости к соплам 9 и 10.
При подаче на вход сумматора-модулятора сигнала управления, равного сумме сигналов командного и обратной связи (t), он будет нромодулирован по времени прямоугольными импульсами.
Донускают, что длительность импульсов ( + ) нолярности увеличена на отрезок вре.мепи т. Если считать, что ( + ) импульс подается на вход релейного привода 1 в момент времени / О, то он срабатывает через отрезок
Т
времени тз. Через отрезок времени t - +
+ Тз срабатывает релейный привод 3. Начинается перемещение золотника 13 и, как следствие, исполнительного органа, так как сопло 9 открылось для слива жидкости.
Т Через отрезок времени - + тз -f т реZi
лейный привод 1 отпускает, сопло 9 перекрывается, перемещение золотника и исполнительного органа нрекращается. Следовательно, величина перемещения золотника будет пропорциональна увеличению длительности ( + ) или
(-) импульса за счет сигнала управления обратной связи. При этом исполнительный орган не соверщает донолнительных перемещений, а непроизводительный, расход жидкости при высокой степени демпфирования отсутствует, хотя чувствительность и точность работы из.мепились.
Предмет изобретения
Релейный гидроусилитель, содержащий сумматор-модулятор, золотник с осевым зазором, управляющие камеры которого подключены к соплам, заслонки с четырьмя релейными приводами, дроссели, каналы слива и подвода рабочего тела, отличающийся тем, что, с целью устранения резонанса на частотах колебаний объекта, заслонки установлены в каналах слива, входы двух релейных приводов заслонок соединены с выходами сумматорамодулятора, выходы - с соответствующими входами двух других релейных приводов-заслонок, а управляющие камеры золотника подключены к дросселям через осевой зазор.
-3 у, Lf(t}
г / б/« с /5 /7 /7 /2
7
е 7
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕРВОМЕХАНИЗМ12 | 1973 |
|
SU382853A1 |
| Релейный электропривод | 1972 |
|
SU446028A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1991 |
|
RU2010108C1 |
| Электрогидравлический усилитель | 1983 |
|
SU1393939A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 1970 |
|
SU278337A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ГИДРОУСИЛИТЕЛЯ | 2010 |
|
RU2446320C2 |
| Гидроусилитель | 1990 |
|
SU1710862A1 |
| Электрогидравлический усилитель | 1990 |
|
SU1710866A1 |
| Электрогидравлический привод | 1979 |
|
SU817327A1 |
| ГИДРОРАСПРЕДЕЛИТЕЛЬ С ВИБРАЦИОННЫМ ПЛУНЖЕРОМ | 1969 |
|
SU249132A1 |