Изобретение относится к оистемам автоматического регулирования и может быть использовано в системах управления летательных аппаратов.
РЬвестен электрический релейный привод, содержащий внутренний замкнутый контур, состоящий из усилителя с идеальной релейной характеристикой, соединенного с двумя основными рабочими муфтами, иодключенными к интегратору с ограничением и к тормов«ым муфтам соответственно, а также иснолнитель1 ый механизм, связанный с выходами рабочих муфт, и исполнительный орган, соединенный с выходом исполнительного механизма и выходами тормозных муфт, подключенных « выходу усилителя с идеальной релейной характеристикой, вход которого через элемент обратной связи соединен с исполнительным мехапизмом.
Предлагаемый электропривод отличается тем, что, с целью улучшения динамических характеристик и повышения экономичности, в нем модулятор-сумматор, релейные элементы и интегратор образуют замкнутый контур, а выход интегратора соединен с входами про4; о р цио и а л ьн ых м у ф т.
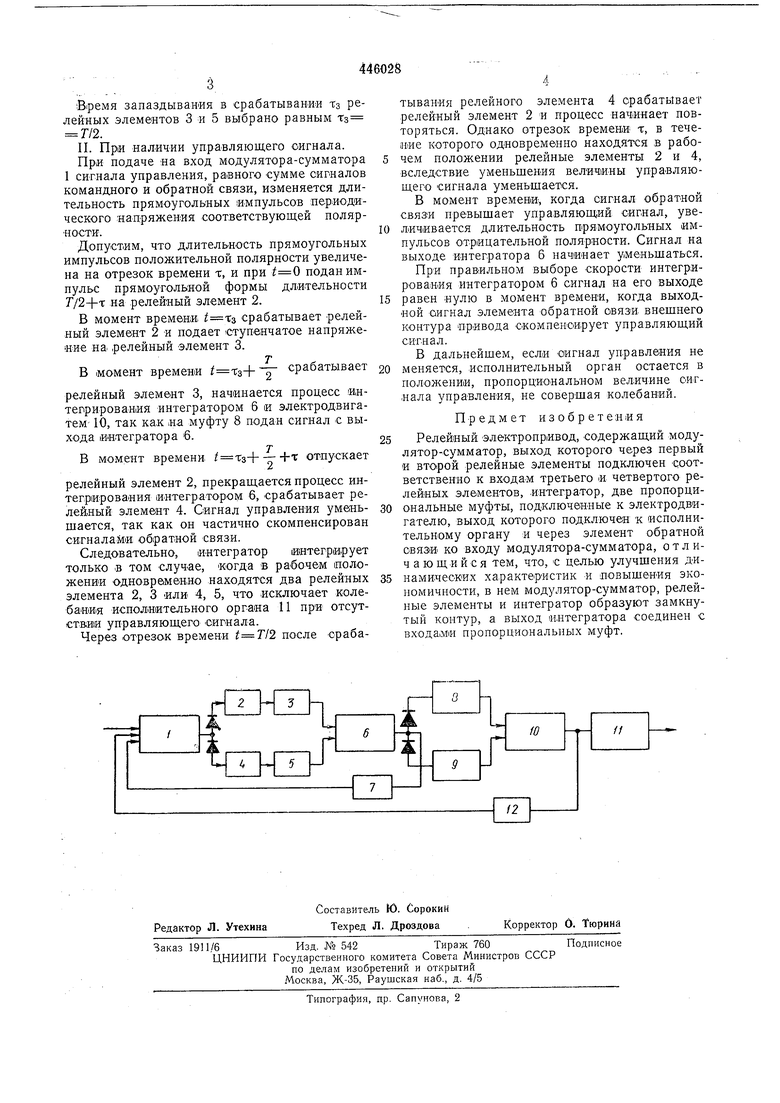
На чертеже изображена блок-схема предлагаемого релейного электропривода.
Он содержит .модулятор-сумматор 1, релейяые элементы 2-5, интегратор 6, элемент 7
обратной связи внутреннего контура, пропорциональные муфты 8, 9, электродвигатель 10, исполнительный орган II и элемент 12 обратной связи релейного электропривода.
Предлагаемый электропривод работает следующим образом.
1. При отсутствии управляющего сигнала. Допустим, что в момент включения привода под напряжение (t - текущее время) с
модулятора-сумматора на релейные элементы 2 и 4 подано лериодическое напряжение прямоугольпой формы, и в MOiMeHT начала работы привода подан импульс прямоугольной формы длительности Т/2 (Т - период напряжения на
выходе модулятора-сумматора при отсутствии сигнала на его входе) положительной полярности «а релейный элемент 2. Через отрезок тз, где тз - запаздывание в срабатывании релейных элементов 2 и 4, релейный элемент
2 срабатывает. При этом ступенчатое напряжение подается на релейный элемент 3. Однако интегратор б не интегрирует, так как не сработал релейный элемент 3. Через отрезок
Т времени t -|-тз срабатывает релейные элементы 3 и 4 и отпускает релейный элемент 2. Однако и в этом случае интегратор 6 не интегрирует, так как релейные элементы 2 и 3 «е были одновременно в рабочем положении, В дальнейшем процесс повторяется.
время запаздывания в срабатывании тз релейных элементов 3 « 5 выбрано равным Тз Т/2.
II. При наличии управляющего сигнала.
При подаче яа вход модулятора-сумматора 1 сигнала управления, равного сумме сигналов командного и обратной связи, изменяется длительность прямоугольных я-мпульсов периодического напряжения соответствующей полярности.
Допустим, что длительность прямоугольных импульсов положительной полярности увеличена на отрезок времени т, н при 0 подан импульс прямоугольной формы длительности Г/2+Т на релейный элемент 2.
В момент временя тз срабатывает релейный элемент 2 и подает ступенчатое напряжение на релейный элемент 3.
Т
в момент времени тз+ Y срабатывает
релейный элемент 3, начинается процесс и,нтеприрования интегратором 6 и электродвигатем-10, так как иа муфту 8 подан сигнал с выхода интегратора 6.
В момент времени. / тзНЬт отпускает
релейный элемент 2, прекращается процесс интегрирования интегратором 6, срабатывает релейный элемент 4. Сигнал управления уменьшается, так как он частично скомпенсирован сигналами обратной связи.
Следовательно, интегратор интегрирует только в том случае, «огда в рабочем положении одновре1мен,но находятся два релейных элемента 2, 3 или 4, 5, что исключает колебания исполнительного органа 11 при отсутствии управляющего сигнала.
Через отрезок времени после срабатывания релейного элемента 4 срабатывает релейный элемент 2 и процесс начинает повторяться. Однако отрезок времени т, в течение которого одновременно находятся в рабочем положении релейные элементы 2 и 4, вследствие уменьшения величины управляющего сигнала уменьшается.
В момент времени, когда сигнал обратной связи превышает управляющий сигнал, увеличивается длительность прямоугольных импульсов отрицательной полярности. Сигнал на выходе интегратора 6 начинает уменьшаться.
При правильном выборе скорости интегрирования интегратором 6 сигнал на его выходе равен нулю в момент времени, когда выходной сигнал элемента обратной связи внещнего контура привода скомпенсирует управляющий сигнал.
В дальнейшем, если сигнал управления не меняется, исполнительный орган остается в положении, пропорциональном величине сигнала управления, не совершая колебаний.
Предмет изобретения
Релейный электропривод, содержащий модулятор-сумматор, выход которого через первый и второй релейные элементы подключен соответственно к входам третьего и четвертого релейных элементов, интегратор, две пропорциональные муфты, подключенные к электродвигателю, выход которого подключен к исполнительному органу и через элемент обратной связи ко входу модулятора-сумматора, отличающийся тем, что, с целью улучшения динамических характеристик и повышения экономичности, в нем модулятор-сумматор, релейные элементы и интегратор образуют замкнутый контур, а выход интегратора соединен с входалш пропорциональных муфт.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЛЕЙНЫЙ ГИДРОУСИЛИТЕЛЬ | 1972 |
|
SU424998A1 |
| РЕЛЕЙНЫЙ ЭЛЕКТРОПРИВОД | 1969 |
|
SU233776A1 |
| РЕЛЕЙНОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1971 |
|
SU305461A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| РЕЛЕЙНОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1970 |
|
SU283360A1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2216846C2 |
| АДАПТИВНОЕ ИНТЕГРИРУЮЩЕЕ УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2012 |
|
RU2513024C2 |
ъ IP
fO
//
