1
Изобретение предназначено для высокоточных систем автоматического управления, например для управления точными динамическими стендами.
Известное устройство для управления скоростью механической нагрузки содержит два следящих привода различной мощности для грубого и точного управления, механически подключенных через дифференциал к нагрузке, что не позволяет обеспечить плавность и точность в большом диапазоне скоростей.
В предлагаемом устройстве установлены подключенный ко входам следящих приводов и управляющему входу торм-оза грубого привода селектор аналоговых управляющих сигналов, связанный с его управляющим входом и входом следящего привода меньшей мощности цифровой блок поправки скорости и подключенные к его входам цифровой задающий блок и цифровые датчики скорости следящих приводов, что позволяет повысить плавность и точность мгновенной и средней скорости.
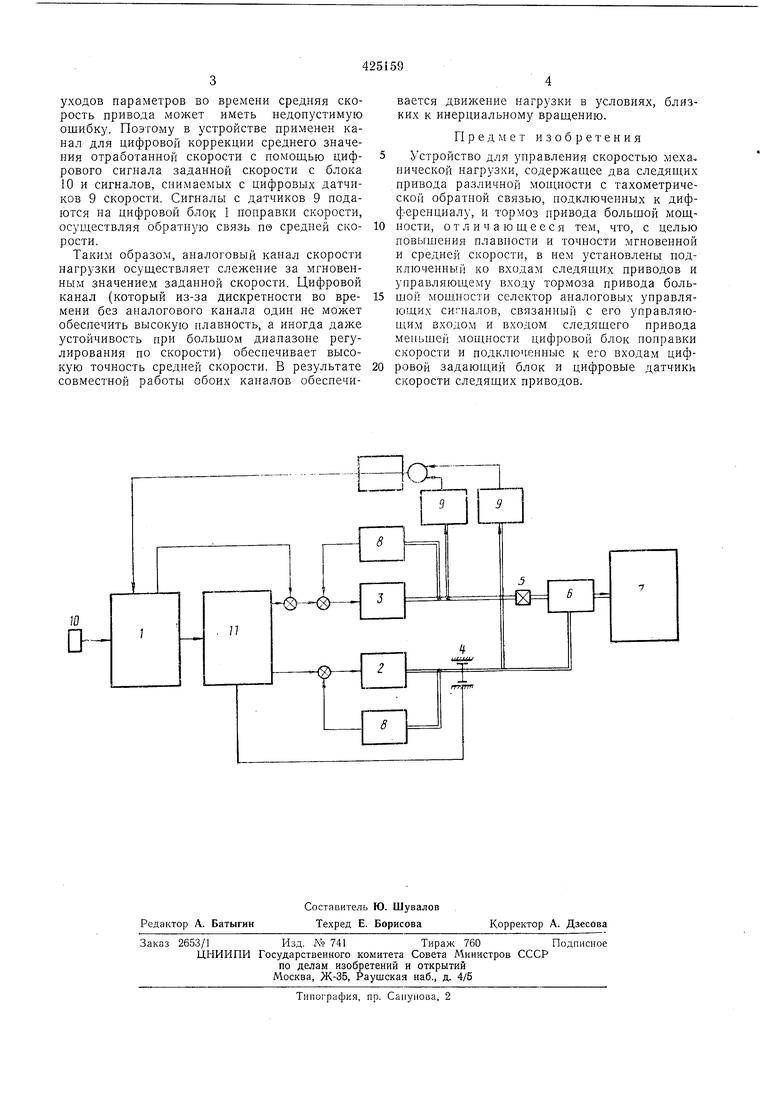
На чертеже представлена кинематическая и электрическая схема предлагаемого устройства.
Приняты следующие обозначения: цифровой блок 1 поправки скорости; следящие приводы большой 2 и малой 3 Мощности соответственно; тормоз 4 привода большой мощности; редуктор 5; дифференциал 6; механическая нагрузка 7; аналоговый датчик 8 скорости; цифровой датчик 9 скорости; цифровой задающий блок Ю; -селектор И аналоговых
управляющих сигналов.
Отличительной чертой предлагаемой системы следящих приводов является наличие аналогового и цифрового управляющих каналов. Аналоговый канал имеет специальный селектор 11, посредством которого управляющий сигнал поступает на вход привода 3 малой мощности при работе в диапазоне малых скоростей, а при больщой скорости - на вход привода малой 3 и большой 2 мощности. При
работе на малых скоростях привод 2 большой мощности заторможен тормозом 4 для исключения влияния его неравномерности на работу малого привода (под понятием «малая скорость понимается работа привода малой
мощности до номинальных оборотов исполнительного двигателя).
В аналоговом канале исполнительные двигатели больщой и малой мощностей кинематически связаны с аналоговыми датчиками 8
скорости. Управляющий сигнал аналогового канала и сигналы, снимаемые с датчиков 8, подаются на входы приводов (привода с тахометрической обратной связью) для обеспечения режима слежения с необходимой плавностью при заданной скорости. Однако из-за
уходов параметров во времени средняя скорость привода может иметь недопустимую ошибку. Поэтому в устройстве применен канал для цифровой коррекции среднего значения отработанной скорости с помощью дифрового сигнала заданной скорости с блока 10 и сигналов, снимаемых с цифровых датчиков 9 скорости. Сигналы с датчиков 9 подаются на цифровой блок 1 поправки скорости, осуществляя обратную связь п0 средней скорости.
Таким образом, аналоговый канал скорости нагрузки осуществляет слежение за мгновенным значением заданной скорости. Цифровой канал (который из-за дискретности во времени без аналогового канала один не может обеспечить высокую плавность, а иногда даже устойчивость при большом диапазоне регулирования по скорости) обеспечивает высокую точность средней скорости. В результате совместной работы обоих каналов обеспечивается движение нагрузки в условиях, близких к инерциальному вращению.
Предмет изобретения
Устройство для управления скоростью меха, нической нагрузки, содержащее два следящих привода различной мощности с тахометрической обратной связью, подключенных к дифференциалу, и тормоз привода большой мощности, отличающееся тем, что, с целью повыщения плавности и точности мгновенной и средней скорости, в нем установлены подключенный ко входам следящих приводов и управляющему входу тормоза привода большой мощности селектор аналоговых управляющих сигналов, связанный с его управляющим входом и входом следящего привода меньшей мощности цифровой блок поправки скорости и подключ,енпые к e. входам цифровой задающий блок и цифровые датчики скорости следящих приводов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Авторулевой | 1979 |
|
SU842725A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ПРИВОД ПОВОРОТНОЙ ПЛАТФОРМЫ | 2017 |
|
RU2656999C1 |
| Двухканальная следящая система | 1973 |
|
SU446027A1 |
| ДВУХДВИГАТЕЛЬНЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1969 |
|
SU432647A1 |
| Замкнутый шаговый электропривод | 1984 |
|
SU1259465A1 |
| Следящий электропривод | 1978 |
|
SU773884A1 |
| Двухотсчетный следящий привод | 1989 |
|
SU1700535A1 |
| Замкнутый шаговый электропривод с самокоммутацией и дроблением шага | 1988 |
|
SU1511842A1 |
| СПОСОБ ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ УГЛА | 2012 |
|
RU2488958C1 |
| Электропривод | 1979 |
|
SU1023605A1 |
