Изобретение относится к области автоматического регулированг1Я и может быть использовано в силовых приводах большой мощности, работающих в широком диапазоне скоростей. В технике регул фования систем большой мощности в связи с ограниченной шкалой мощиостей двигателей спецназначенпя находят применение схемы с использованием исполнительных двигателей, работающих на общий выходной вал системы. При жестком соединении валов исполнительных двигателей диапазон возможных скоростей наведения двухдвигательного привода не превышает диапазона возможных скоростей каждого из двигателей. Кроме того, при жестком соединении валов двигателей оба двигателя включены в течение всего времени работы привода, независимо от величины мощности, требуемой для вращения выходного вала. Для систем наведения, в которых работа при высоких скоростях и больших нагрузках соста вляет небольшую часть общего времени работы (например, в приводах корабельных антенных установок), этот недостаток является весьма существенным. Применение в кинематической цепи следящего привода механического дифференциала, входные валы которого связаны с валами исполнптельпых двигателей, управляемых от отдельных генераторов, а выходной вал соединен через дополнительный -редуктор с выходным валом системы, тюзволяет устранить этот недостаток н при малых скоростях наведелия осуществлять работу одним двигателем, затормозив второй дв-1гатель механическим тормоз о.м. Отключение одного из двигателей ирп малых скоростях наведення позволяет не только увелпчить общий ресурс работы привода, но п расширить диапазон возможных с соростек наведения за счет увеличен 1Я передаточного числа кинематической цепи при отключении одного из двигателей. Однако при стабилизации каждого из двигателей совместно с соответствующим преобразователем по известным схе-мам (раздельные для каждого двигателя обратные по скорости, току и т. д.) из-за взаимовлияния исполнительных двигателей друг на друга через механичеок;1Й дгифференциал довольно трудно получить качество регулирования, близкое к качеству регулирования однодв1 гательного привода той же мощности. Кроме того, npij таком иостроении схемы приходится изменять глубину обратных связей для сохранения требуемых динамических качеств при переходе на режим работы с одним двигателем.
3
С целью повышения надежности и исключения коммутации при переходе с работы на одном двигателе к работе на двух двигателях II наоборот в предлагаемой схеме двухдвигатсльного следящего иривода с соединением двигателей через механический дифференциал стабилизадия обоих двигателей совместно с соответствующими преобразователями осуществляется ири помощи общих обратных связей но скорости и токам иололиительных двигателей.
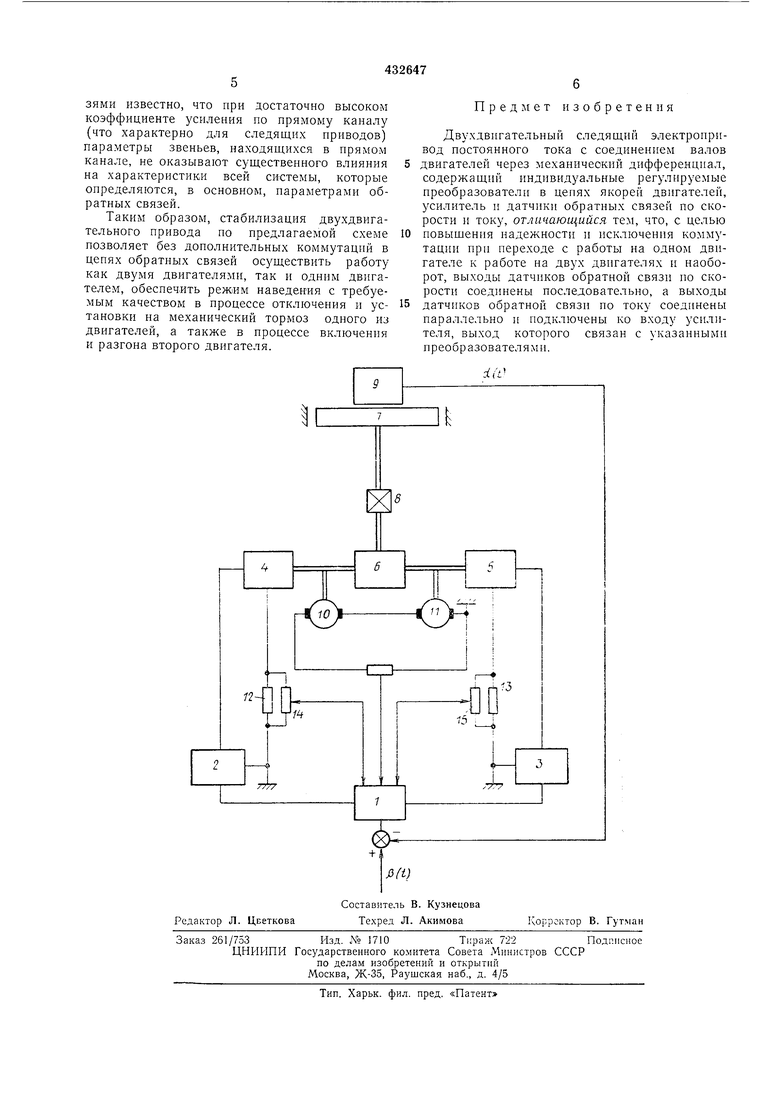
Схема иредложенного следящего иривода показан-а на чертеже.
Сигнал ощибки, полученный как разность между управляющим воздействием |3(/) и регулируе1мой координатой а(/), иостуиает ка вход усилительного устройства /. К выходу усилительного устройства / подключены обмотки упра(Вления преобразователей 2 и 3. Преобразователи 2 и 3 соединены с исполнительными двигателям.и 4 и 5 соответственно.
Углы поворота двигателей складываются на механическом дифференциале 6. Выходной вал дифференциала 6 соединен с нагрузкой иривода 7 через дополнительные кинематические передачи 8. Информация о положении нагрузки (.регулируемая координата) снимается с датчика обратной связи 9.
Стабилизация привода осуществляется с помощью сигналов, снимаемых с последовательно соединенных тахогенераторов 10 и //, связанных с валами исполнительных двпгателей 4 и 5, и сигналов, снимаемых с сериесных сопротивлений 12 и 13, которые поступают на вход усилительного устройства 1.
Сигнал обратной связи по скорости, сиимаемый с последовательно соедппенных тахогенераторов 10 и //, содержит составляющие, пропорциональные скорости вращения первого и второго входного вала дифференциала. Выбор коэффициентов пропорциональности (например, регулировка возбуждения тахогеператоров) обеспечивает, чтобы этот сигнал был проиорц 1онален сумме скоростей входных валов дифференциала. Тогда, с учетом свойства дифференциала, что скорость выходного вала равна сумме скоростей входных валов, можно считать, что сигнал обратной связи по скорости, снимаемый с последовательно соединенных тахогенераторов, пропорционален скорости вращения выходиого вала дифференциала независимо от скоростей отдельных двигателей.
В двигателях постоянного тока с независимым возбуждением ток двигателя пропорционален моменту на валу двигателя. Поэтому можно записать:
КШ 1я1 «1 + диф,(1)
ЛМ2 я2 /р2 а., + ,(2)
где /р1, /р2 - моменты инерции роторов, Km, коэффициент пропорциональности между токами и момента.ми двигателей, М1лиф, Мадиф-моменты на выходных валах
дифференциала, д,, и - ускорения на выходных валах
дифференциала.
Тогда суммарная обратная связь по току определится выражением:
R.
Уос. ,.М
1ди;1
С2
(3)
- «2 + Л12диф1,
где RCI, R-C4 - величины сериесных сопротивлений 12 и 13.
При иомощи регулировочных сопротивлений 14 и 15 можио скомпенсировать различие в величинах Rc - Rci и к - , отличие в величинах моментов инерции роторов в двигателях одного класса незначительно. Тогда можно записать, что
(/ост к /р (а, - а;) + ,„ф -;+ М,,„ф,(4)
где /( - коэффициент пропорциональности.
С учетом свойства дифференциала, что моменты на входных валах равны между собой, момент на выходном валу равен их полусумме, а ускорение выходного вала - сумме ускорений входных валов. Из уравнения (4):
УОСТ к /р (al + аз) + /„ Яд + Мс (о)
или
/Лет /t (/р -f /н) ,
где /„ - момент инерции нагрузки, приведенный к выходному валу дифференциала,
MC - внешний момент сопротивления, действующий на нагрузку,
а, - ускорение выходного вала.
При анализе воиросов динамики внешний момент Мс можно исключ:ить из рассмотрения и полагать, что сигнал обратной связи пропорционален ускорению выходного вала дифференциала.
Следовательно, можно считать, что независимо от режима работы (одним двигателем или двумя), а также в иереходных режимах при подключении или отключении одного из двигателей сигнал стабилизирующих обратных связей остается пропорциональным скорости и ускорению выходного вала дифференциала.
Из теории систем автоматического регулирования с параллельными обратными свя
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU376751A1 |
| СЛЕДЯЩИЙ ПРИВОД | 1972 |
|
SU343251A1 |
| Следящий привод | 1974 |
|
SU550630A1 |
| СТЕНД С БЕГОВЫМИ БАРАБАНАМИ ДЛЯ ИСПЫТАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1971 |
|
SU312170A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1971 |
|
SU305458A1 |
| Следящий привод наведения | 2024 |
|
RU2835471C1 |
| Устройство для формирования управляющего воздействия следящего привода | 1973 |
|
SU516016A1 |
| ОРГРЭС Государственного производственного комитета по энергетике и электрификации СССР | 1966 |
|
SU184744A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ МЕХАНИЧЕСКОЙ НАГРУЗКИ | 1972 |
|
SU425159A1 |
| Двухканальный электромашинный следящий привод | 1973 |
|
SU492850A1 |
