1
Изобретение относится к прецизионным системам автоматического регулирования с широким диапазоном скорости нагрузки.
Известна двухканальная следящая система, содержащая в канале грубого управления связанный с входом системы и выходом датчика угла нагрузки чувствительный элемент, соединенный с сумматором, подключенным к компенсирующему блоку и датчику скорости двигателя, а также силовой блок, подключенный через дифференциал и редуктор к нагрузочному элементу, соединенному с датчиком скорости и угла нагрузки, а в канале точного управления - силовой блок, связанный с сумматором, датчиком скорости и дифференциалом.
Однако эти системы обладают недостаточной точностью из-за влияния нелинейности и кинематических погрешностей.
Цель изобретения - повышение точности, плавности и качества системы.
Это достигается тем, что в предлагаемой системе в канале грубого управления установлены подключенный к выходам силового блока и редуктора блок измерения упругой деформации, модель механических характеристик, соединенный с их выходами блок выработки производных и два последовательно связанных логических блока, первый из которых подключен к выходам сумматора, компенсирующего блока, датчиков угла и скорости нагрузки, а второй - к выходу блока выработки производных и входу силового блока, а в канале точного управления установлены подключенный к входу сумматора ключ и соединенные с его входами, последовательно включенные модель желаемого закона перемещения нагрузки и чувствительный элемент, входы которых подключены соответственно к входу системы и выходу датчика угла нагрузки.
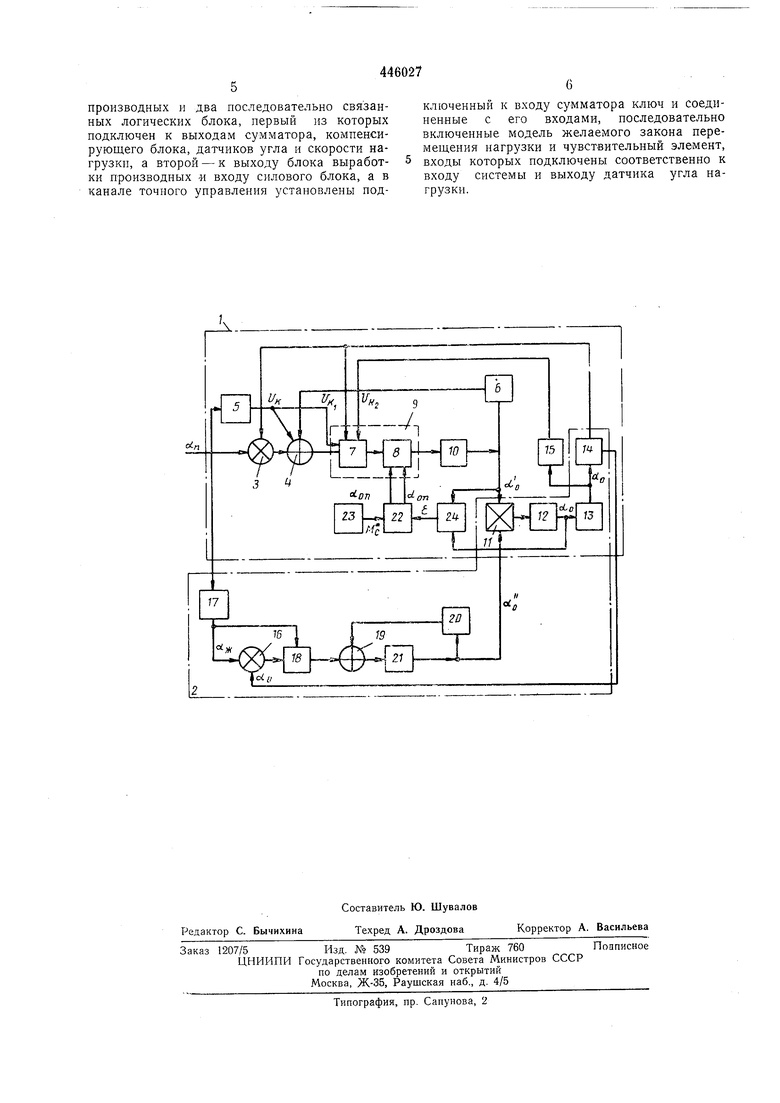
На чертеже представлена блок-схема двухканальной следящей системы.
Предлагаемая система состоит из двух каналов: канала 1 грубого управления и канала 2 точного управления.
В канале 2 грубого управления входной сигнал поступает на один из входов чувствительного элемента 3. Выход чувствительного элемента 3 .соединен с входом сумматора 4, второй вход которого связан с выходом компенсирующего блока 5, на вход которого поступает входной сигнал системы. Третий вход сумматора 4 соединен с выходом датчика 6 скорости двигателя, а выход - с одним из входов первого логического блока 7, выход которого связан с входом второго логического блока 8. Логические блоки,7, 8 образуют блок 9 формирования управляющего сигнала. Выход блока 8 соединен с входом сило
вого блока 10 канала грубого управления, состоящего из усилителя мощности (тиристорный регулятор тока) и исполнительного двигателя. Выход блока 10 связан с входом датчика 6 скорости двигателя и с одним из входов дифференциала 11, выход которого соединен с входом редуктора 12. Выход редуктора 12 связан с входом исполнительного механизма (нагрузочный элемент) 13, его выход соединен с датчиком 14 угла нагрузки и датчиком 15 скорости. Выход датчика 14 связан с другим входом чувствительного элемента 3, с вторым входом логического блока 7 и с одним из входов чувствительного элемента 16 канала точного управления. Выход датчика 15 скорости соединен с третьим входом логического блока 7, четвертый вход которого связан с выходом компенсирующего блока 5. Вход чувствительного элемента 16 соединен с выходом модели 17 желаемого закона перемещения нагрузки в различных режимах работы системы (модель II), ее вход Связан с входом системы. Выход элемента 16 соединен с входом ключа 18, второй вход которого связан с выходом модели 17. Выход блока 18 соединен с одним из входов сумматора 19, его второй вход связан с выходом датчика 20 скорости двигателя, вход которого связан с выходом силового блока 21 канала 2. Вход блока 21 соединен с выходом сумматора 19, а выход - с вторым входом дифференциала И. Входы логического блока 8 связаны с выходами блока 22 выработки второй и третьей производных от выходной координаты системы, один вход которого соединен с выходом модели 23 механической характеристики (модель I), а второй вход - с блоком 24 измерения величины упругой деформации, его один вход связан с выходом силового блока 10, а второй вход - с выходом редуктора 12. .
Предлагаемая система работает в двух режимах: ири переброске исполнительного механизма (Нагрузки) на заданный угол с заданной точностью за заданное время и с заданной конечной скоростью и при слежении за входным сигналом, изменяющимся с постоянной скоростью, с определенной точностью.
Основными требованиями, предъявляемыми к системе в первом режиме, являются; оптимальный закон отработки большого рассогласования, дОСтаточно высокая точность вывода исполнительного механизма 13 на слежение. Для обеспечения оптимального переходного процесса и достаточной точности вывода механизма 13 на слежение в канал 1 введены логические блоки 7, 8, обеспечивающие необходимый управляющий сигнал на входе блока 10 ио данным, снимаемым с блоков. 23, 22, 24, 15.
Основными требованиями, предъявляемыми к СистемеВО втором режиме, являются высокая точность и плавность слежения в широком диапазоне скоростей при наличии в
механических элементах нелинейного момента сопротивлений, люфта, упругих деформаций, кинематических и циклических погрешностей. Для обеспечения этих требований во втором режиме работы в систему введены уже названные блоки 7, 8, 9, 22, 23, 24, 15 и дополнительно - блоки 16, 17, 18.
Для обеспечения вывода нагрузки 13 на слежение с высокой точностью необходимо в зонах регулирования канала 1 грубого управления вводить корректирующие сигналы, учитывающие люфт, упруг/ие деформации, нелинейность момента сопротивлений.
При слежении, кроме указанных корректирующих сигналов, необходимо вводить дополнительно коррекцию на кинематические и циклические погрешности в элементах И, 12, 13.
Первую коррекцию осуществляют логические блоки 7, 8. В связи с тем, что «спользуемые сигналы являются приближенными, дополнительную коррекцию производит канал 2 точного управления, который включается в работу с помощью ключа 18 при подходе нагрузки 13 к заданному положению в первом режиме и постоянно включен во вторам режиме. Входным сигналом канала 2 точного управления является желаемый закон перемещения нагрузки 13, синтезированный заранее с учетом всех погрешностей и нелинейностей в канале 1 грубого управления и реализованный в модели 17.
Коррекция непосредственно в канале 1 грубого управления осуществляется выходным сигналом логических блоков 7, 8, который управляет током исполнительного двигателя с помощью тиристорного регулятора, входящих в силовой блок 10. Приближенное формирование сигналов производных осуществляется по замеренному с помощью блока 24 значению упругих деформаций и расчетному или замеренному значению момента сопротивления, извлекаемому из модели 23.
Предмет изобретения
Двухкапальная следящая система, содержащая в канале грубого управления связанный с входом системы и выходом датчика угла нагрузки чувствительный элемент, соединенный с сумматором, подключенным к компенсирующему блоку и датчику скорости двигателя, а также силовой блок, подключенный через дифференциал и редуктор к нагрузочному элементу, соединенному с датчиками скорости и угла нагрузки, а в канале точного управления - силовой блок, связанный с сумматором, датчиком скорости и дифференциалом, отличающаяся тем, что, с целью повышения точности системы, в ней в канале грубого управления установлены подклю ченный к выходам силового блока и редуктора блок измерения упругой деформации, модель механических характеристик, соединенный с их выходами блок выработки производных и два последовательно связанных логических блока, первый из которых подключен к выходам сумматора, компенсирующего блока, датчиков угла и скорости нагрузки, а второй - к выходу блока выработки производных « входу силового блока, а в канале точного управления установлены подключенный к входу сумматора ключ и соединенные с его входами, последовательно включенные модель желаемого закона перемещения нагрузки и чувствительный элемент, входы которых подключены соответственно к входу системы и выходу датчика угла нагрузки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Трехканальная следящая система | 1989 |
|
SU1716479A1 |
| Двухканальный следящий привод | 1973 |
|
SU497558A1 |
| Следящая система | 1980 |
|
SU885970A1 |
| Двухканальный следящий привод | 1975 |
|
SU549781A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| Двухканальная следящая система с разделенной нагрузкой | 1975 |
|
SU553590A1 |
| Двухканальная следящая система комбинированного регулирования | 1974 |
|
SU498603A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| Система слежения гелиоустановки | 1983 |
|
SU1135973A1 |
| Следящий привод | 1974 |
|
SU641393A1 |
