Целью настоящего изобретения является автоматизация процесса загрузки, выгрузки, продувки и смазки штампов высокоскоростного молота с нижним выталкивателем.
Согласно изобретению, предлагаемая механическая рука состоит из загружающего механизма, снабженного захватом и устройством для принудительиого заталкивания заготовки с минимальным зазором в матрицу штампа (или точной установки на открытый пуансон), выгружающего устройства, снабженного пневмоуправляемым захватом и механизмом подъема; системы пневмоэлектрического управления. Загружающий и выгружающий механизмы расположены на общей станине. Их продольные оси пересекаются над щтампом, а сами механизмы снабжены необходимыми устройствами регулировок положения их захватов, что позволяет совместить центры захватов с осью штампа в момент установки заготовки и снятия поковкн. Продувка и смазка щтампа осуществляется форсункой, закрепленной над захватом выгружающего механизма, во время остановки последнего в процессе выноса поковки.
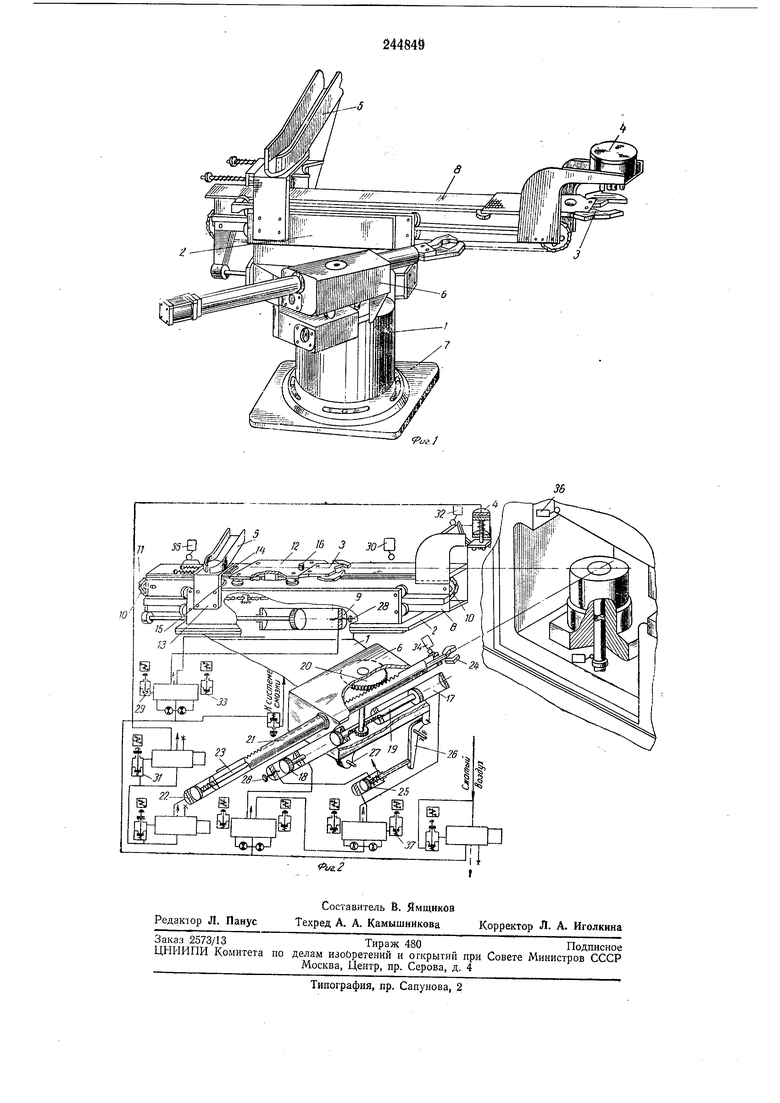
На фиг. 1 изображена механическая рука, общий вид; на фиг. 2 - схема работы механической руки.
йо 2 с захватом 3, заталкивателем 4 и орйентатором 5 и выгружающее устройство 6. Оба устройства с помощью специального винта и направляющих колонок поднимаются и опускаются над станиной (регулирование высоты), а станина поворачивается относительно вертикальной оси на плите 7 (угловое регулирование).
Загружающее устройство имеет основание,
в направляющих роликах которого перемещается каретка 8, жестко связанная со штоком пневмоцилиндра 9. Каретка 8 несет кронштейн с пневмоцилиндром заталкивателя, две звездочки 10, которые охватываются цепью
11, и тележку 12, перемещающуюся по направляющим в верхней части каретки. Нижняя ветвь цепи 11 прикреплена к корпусу основания, а верхняя - соединяется с тележкой 12. Благодаря этому при перемещении штока
пневмоцилиндра 9 тележка совершает вдвое больший ход. Ролики, на которых перемещаются каретка и тележка, имеют эксцентричные оси, что позволяет регулировать зазор, сводя их к минимуму. На основании загрузочного устройства укреплен кронштейн 13, который несет ориентатор шторку 14 и упоры 15. Шторка автоматически открывается выступом 16 тележки при ее отходе в заднее положение. Упоры в этом положении тележки раскрываВ корпусе выгрулоющего устройства размещены цилиндр 17 двустороннего действия и цилиндр-приставка 18 одностороннего действия. Шток-рейка 19 взаимодействует с блоком шестерен 20, верхняя шестерня которого передает движение шпинделю 21 выгружающего устройства. Цилиндр 22, находящийся на шпинделе 21, через штангу 23 зажимает и разл имает клещи захвата 24. Корпус выгружающего устройства при помощи цилиндра 25 и коромысла 26 совершает качательное движение на оси 27. Пневмоцилиндр 9 и цилиндр-приставка 18 имеют специальные винты-упоры 28, ограничивающие ход поршней и необходимые для регулирования перемещений захватов 3 и 24.
В исходном положении тележка и шпиндель находятся в крайнем заднем полол ении (выведены из рабочей зоны). Заготовка выдается из нагревателя и попадает в ориентатор, а затем в раскрытый захват 3.
При нажатии на кнопку «пуск на пульте управления включается электромагнит 29. Сжатый воздух поступает в левую полость Пневмоцилиндр а 9, и тележка перемешается к штампу. В конце хода конечный выключатель 30 включает в работу электромагнит 31, и заталкиватель 4 подает заготовку в матрицу штампа.
По прошествии заданного с помощью реле промел утка времени электромагнит 31 отключается, заталкиватель, поднимаясь, нажимает конечный выключатель 32, после чего включается электромагнит 33, и тележка возвращается в исходное положение.
Пуск молота возможен только при нажатых конечных выключателях 34 и 35, что предотвращает возможность его удара, если тележка и шпиндель не находятся в исходном положении. После совершения удара баба молота поднимается, нажимает на конечный выключатель 36 и включает электромагнит 37. Сжатый воздух поступает в правую полость цилиндра 17, и шпиндель возвращается в исходное положение. При нажиме на конечный
выключатель 34 цилиндр-приставка 18 соединяется с атмосферой и клещи захвата 24 освобождают поковку.
Цикл работы механической руки повторяется.
Предмет изобретения
1.Механическая рука преимущественно к высокоскоростным молотам с нижним выталкивателем, содержащая основание с расположенными на ней устройствами подачи и съема изделий, снабженными клещевыми захватами, а также ориентатор заготовок и систему управления, отличающаяся тем, что, с целью создания автоматического цикла работы и повышения производительности, она снабжена общей с молотом системой управления, а продольные оси устройств подачи и съема
изделий расположены под углом, верщина которого-лежит на вертикальной оси выталкивателя, при этом устройство подачи снабжено приспособлением для принудительного заталкивания заготовки в полость штампа, а
устройство съема снабжено форсунками для продувки и смазки штампа и имеет возможность перемещения в вертикальном направлении.
2.Механическая рука по н. 1, отличающаяся тем, что, с целью осуществления загрузки вертикально ориентированных заготовок в полость штампа, устройство подачи связано цепным механизмом удвоения хода с приводом нриснособления для принудительного заталкивания заготовок в полость штампа.
3.Механическая рука по п. 1, отличающаяся тем, что, с целью обеспечения продувки и смазки штампа, привод устройства съема изделий выполнен в виде двух пневматических цилиндров, штоки поршней которых связаны блоком шестерен со шток-рейкой устройства съема и дополнительно снабжен третьим пневматическим цилиндром фиксированного положения форсунок над полостью штампа.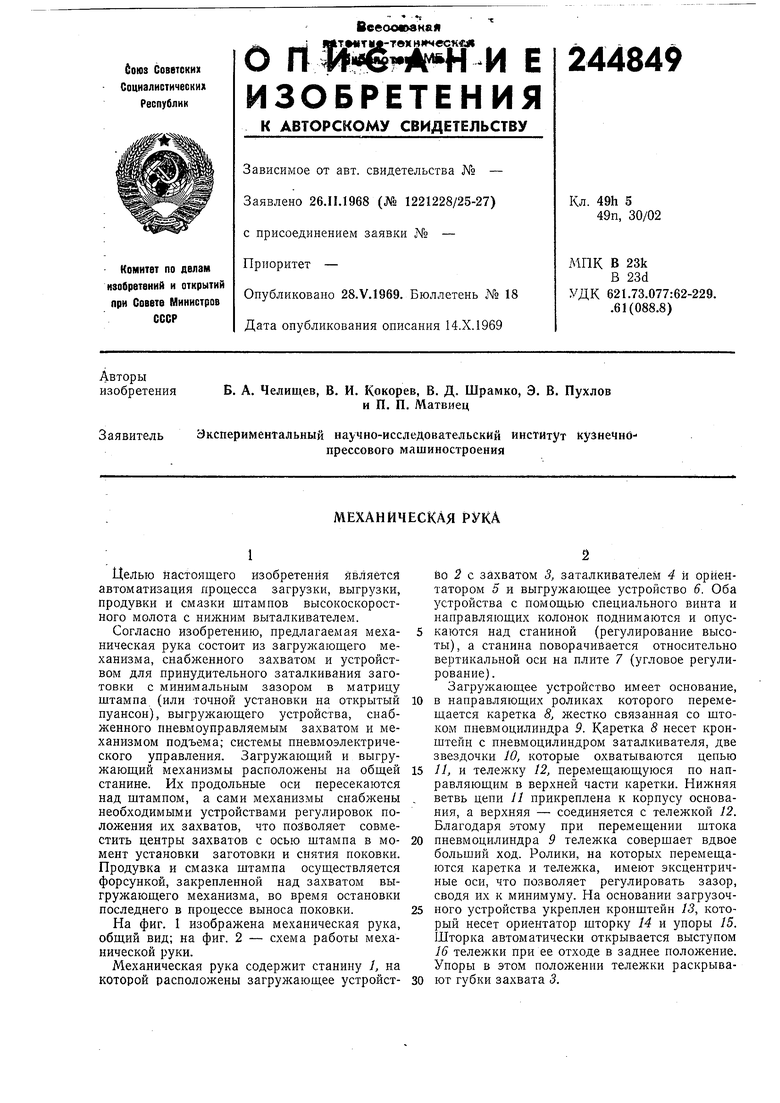
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫГРУЖАЮЩЕЕ УСТРОЙСТВО МЕХАНИЧЕСКОЙ РУКИ К ВЫСОКОСКОРОСТНОМУ МОЛОТУ | 1971 |
|
SU294663A1 |
| РУКА МЕХАНИЧЕСКАЯВ П Т БЙП .-':••-V. ^-;:^ Н о .-•' , -•-й(ц, -.••'..•,;:,.; | 1972 |
|
SU425714A1 |
| Устройство для подачи в штамп штучных заготовок | 1979 |
|
SU1202683A1 |
| Робот к листоштамповочному прессу | 1988 |
|
SU1542672A1 |
| АВТОМАТИЧЕСКИЙ СТАНОК ДЛЯ ЧЕРНОВОЙ ОБРАБОТКИ КОЛЕЦ НЕПРАВИЛЬНОЙ ФОРМЫ | 1969 |
|
SU252812A1 |
| Автоматизированная линия для штамповки деталей из листового материала | 1987 |
|
SU1505639A1 |
| Установка для индукционного нагрева и подачи на последующую обработку листовых заготовок | 1984 |
|
SU1268625A1 |
| Автооператор | 1979 |
|
SU772809A1 |
| Автоматическая линия штамповки поворотных кулаков | 1987 |
|
SU1466868A1 |
| Передний стол стана продольной прокатки труб | 1980 |
|
SU874237A1 |