1
Изобретение относится к автоматике и может найти широкое применение при проектировании систем автоматического управления различными объектами с переменными параметрами.
Известны многомерные линейные системы автоматического управления нестационарными объектами по сигналам оценок их фазовых координат (оценок переменных состояний), в которых полагают известными переменные параметры объекта управления, содержащие блок основного управления, выходы которого соединены со входами объекта управления и с основными входами модели оценки фазовых координат (оценки непеременных состояний) объекта управления, а первые входы - с выходами первых инверторов, выходы модели оценки фазовых координат объекта управления соединены со входами первых инверторов и через модели датчиков - с первыми входами первых сумматоров, вторые входы которых соединены с датчиками фазовых координат (переменных состояния) объекта управления, а выходы первых сумматоров соединены со вспомогательными входами модели оценки фазовых координат объекта управления. Однако, если параметры объекта управления неизвестны или известны неточно, диапазон
изменения качественных показателей системы управления нестационарным объектом, например времени переходного процесса и его колебательности, определяется максимальным разбросом параметров нестационарного объекта управления относительно параметров модели объекта управления, причем качественные показатели системы управления изменяются вместе с изменением параметров
объекта управления. Системы автоматического управления не позволяют регулировать диапазон изменения качественных показателей и не могут обеспечить постоянства качественных показателей системы управления
при изменении параметров объекта.
Целью изобретения является, при сохранении системой управления свойства помехозащищенности (в том числе и при помехах, близких к «белому шуму), расширение возможностей компенсации влияния переменных параметров объекта управления на качественные показатели системы управления (вплоть до обеспечения постоянства качественных показателей), что одновременно расширяет возможности направленного регулирования диапазона изменения качественных показателей системы управления, например уменьшения разброса длительности переходного процесса, так как при изменении параметров объекта управления качественные показатели системы должны изменяться в заданных пределах. Это достигается введением в систему управления второй модели объекта управления - модели-эталона, вторых сумматоров, вторых инверторов и блока эталонного управления, выходы которого соединены со входами модели-эталона объекта управления и со вторыми входами блока основного управления, выходы модели оценки фазовых координат соединены с первыми входами вторых сумматоров, выходы модели-эталона объекта управления соединены через вторые инверторы со входами блока эталонного управления и соединены со вторыми входами соответствующих вторых сумматоров, выходы которых соединены со входами первых инверторов.
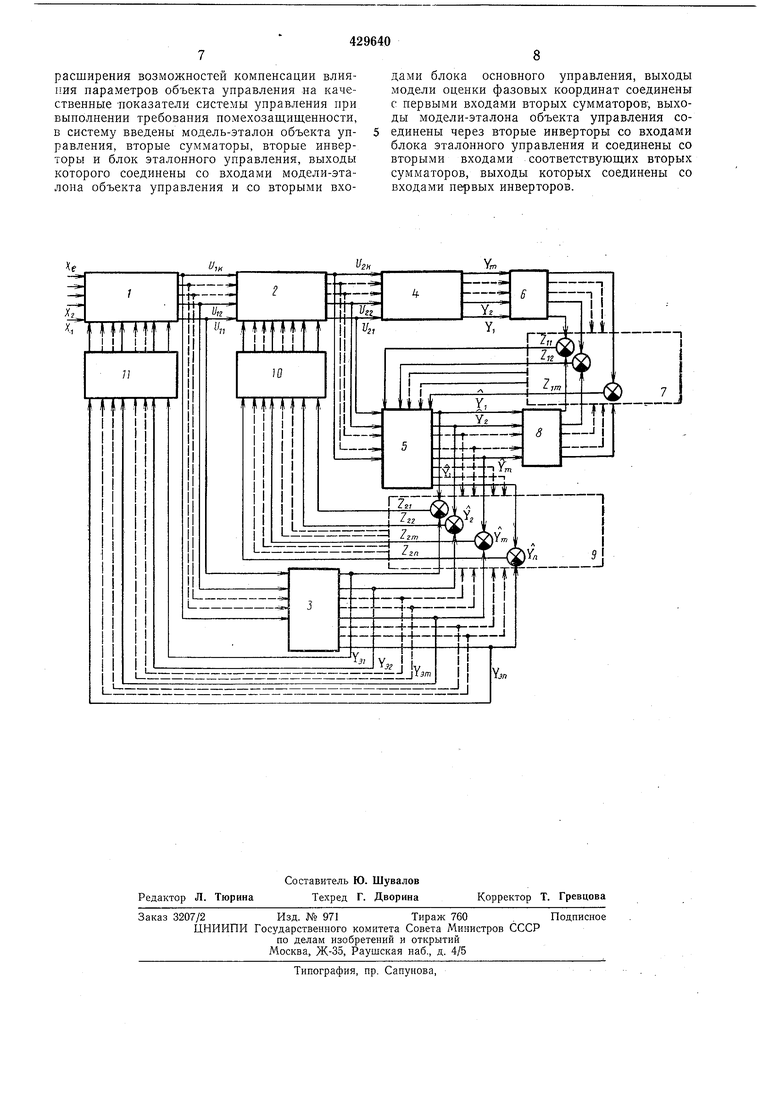
На чертеже представлена блок-схема предлагаемой многомерной системы автоматического управления нестационарным объектом.
Задающие воздействия Xi, Хе поступают на основные входы блока эталонного управления I, который, например, представляет собой блок суммирующих усилителей. С выходов блока эталонного управления 1 управляющие воздействия t/n, 12-.- поступают на вторые входы блока основного управления 2, представляющего собой, например, блок суммирующих усилителей, и-на входы, например, стационарной модели-эталона 3 объекта управления, выполненной, например, в виде блока интеграторов и блока набора нелинейностей. С выходов блока основного управления 2 управляющие воздействия , Uzz. поступают на входы нестационарного объекта управления (включающего и исполнительные устройства) 4 и на основные входы, например, стационарной нелинейной модели 5 оценки фазовых координат объекта управления, включающий и модели исполнительных устройств, выполненной, например, в виде блока интеграторов и блока набора нелинейностей. Выходные сигналы фазовых координат УЬ YZ... Ym объекта управления 4 измеряют с помощью датчиков 6 и подают на вторые входы первых сумматоров 7, например, выполненных на суммирующих усилителях. Сигналы оценок измеренных фазовых коорл л л
динат УЬ YZ... Ym с выходов модели 5 оценки фазовых координат объекта управления подают через модели 8 датчиков, выполненных, например, в виде блока интеграторов, на первые входы первых сумматоров 7. С выходов первых сумматоров 7 сигналы разностей Zii, Zi2...Zim измеренных фазовых координат УЬ У2.Ут объекта управления соответствующих им сигналов оценок
л л л
УЬ YZ... Ym измеренных фазовых координат подают на вспомогательные входы модели 5 оценки фазовых координат объекта управления для коррекции сигналов оценок
АЛлЛ
УЬ УЗ, ...УТО, ...УП всех фазовых координат
/ л л л
объекта. Сигналы оценок УЬ Уг,... Ут,...Уп всех фазовых координат со всех выходов модели- 5 оценки, фазовых координат подают на первые входы вторых сумматоров 9, выполненных, например, на суммирующих усилителях. На вторые входы тех же вторых сумматоров 9 подают все выходные сигналы координат УЭЬ Уэ2, ... Уэт,... УЭП модели-эталона 3 объекта управления. С выходов вторых сумматоров 9 сигналы разностей Z2i, Zzz,.-л л л л
Z2m,...Z2n оценок УЬ У2,...Ут,..-Уи всех фазовых координат объекта управления и соответствующих им сигналов фазовых координат Уэ1, Уэ2,... Уэт,...Уэ7г модели-этялона объекта управления подают через первые инверторы (адаптации)10 на первые входы блока основного управления 2 для устранения рассогласования между оценочными значениями фазовых координат нестационарного объекта управления и значениями фазовых координат модели-эталона объекта управления. Кроме того, все выходные сигналы фазовых координат УЭЬ Уэ2,... Уэт,... Уэтг модели-эталона 3 объекта управления подают через вторые инверторы (обратные связи) 11 на входы блока эталонного управления 1 для формирования обратных связей, обеспечивающих желаемый эталонный процесс. Сущность работы предлагаемой многомерной системы автоматического управления заключается в следующем.
В предлагаемой системе управления, как известная часть использована система управления по оценкам фазовых координат объекта управления, включающая блок основного управления 2, объект управления (включающий исполнительные устройства) 4, модель 5 оценки фазовых координат объекта управления (включающая модели исполнительных
устройств), датчики 6 фазовых координат объекта управления, первые сумматоры 7, модели 8 датчиков фазовых координат и первые инверторы 10. Элементы 5, 6, 7 и 8 блоксхемы формируют систему оценки фазовых
координат (оценки переменных состояния) объекта -правления 4. Структура получения сигналов оценок фазовых координат такова, что, в предположении отсутствия ощибок измерения, можно подбором соответствующих усилений сигналов разностей Zn, Zi2,-Zim с выходов первых сумматоров 7 (выполняющих операции сравнения сигналов измеренных фазовых координат УЬ У2, ... У™ и соответствующих им сигналов
л л л
оценок УЬ У2...Ут фазовых координат) интеграторами модели 5 оценки фазовых координат (с коэффициентами оценок) приблизить
л сколь угодно точно все сигналы оценок УЬ
У2...}т,,..Уп фазовых координат к соответствующим фазовым координатам YI, Y2...Ym,-Yn объекта управления, несмотря на отличие коэффициентов,, например,, стационарной модели 5 оценки фазовых координат от реальных коэффициентов нестационарного объекта управления 4. При наличии помех в сигналах измеренных фазовых координат УЬ Y.2...Ym усиление сигналов разностей Zn, Zi2... ведут из условия оптимальной фильтрации на одном из режимов, и сигналы с выходов модели 5 оценки фазовых координат являются наилучшими оценками фазовых координат объекта управления.
Дополнительным подключением к системе управления по оценкам блока эталонного управления 1, модели-эталона 3- объекта управления и вторых инверторов (эталонных обратных связей) 11 формируют эталонное управление нестационарным объектом 4, обеспечивающее эталонный процесс системы управления, причем эталонные обратные связи вводят по выходным фазовым координатам УЭЬ Уэ2,..-Уэт,. модели-эталона объекта управления, соответствующим всем оценкам л л л
УЬ У2,...Ут,...Уте фазовых координат УЬ У2,... Ym-.-Yn нестационарного объекта п-го порядка.
Для формирования основного управления нестационарным объектом 4 и моделью 5 оценки фазовых координат в систему управления введены вторые сумматоры 9, выполняющие операции сравнения сигналов оценок
л / л л
всех фазовых координат УЬ У2,...Ут,...Уи и соответствующих им выходных сигналов модели-эталона объекта управления УЭЬ Уэ2.-Уэт,.... Введение в управляющие воздействия нестационарным объектам г-ного порядка дополнительных составляющих сигналов разностей Z2i, Z22,...Zzm,-..Z2n (число разностей совпадает с порядком объекта управления) позволяет выбором соответствующих усилий этих сигналов разностей в инверторах (адаптации) 10 обеспечить требуемую степень близости оценок фазовых координат объекта управления к фазовым координа,там модели-эталона объекта управления, а следовательно, и близость фазовых координат объекта управления к их соответствующим эталонным значениям.
Таким образом, предлагаемая многомерная система автоматического управления нестационар-ным объектом позволяет получать инвариантный (независимость) качественных показателей системы по отношению к изменяющимся параметрам объекта управления При сохранении свойства помехозащищенности системы со стороны помех измерения фазовых координат объекта управления.
Исполнительные устройства отклонения управляющих органов, входящие в состав объекта управления 4, могут быть стационарны6
ми и в достаточной мере быстродействующими. Практика инженерного конструирования позволяет в этом случае пол ещать исполнительные устройства в выходную часть блока основного управления 2 или блока эталонного управления 1. При постановке исполнительных устройств в блок эталонного управления 1 необходимо для решения задачи инвариантности качественных показателей сигналы разностей Zzi, Z22,---Z2n подавать на входы инверторов 11 и на вспомогательные входы модели-эталона 3 объекта управления. Модель оценки и модель-эталон объекта управления в этом случае, являясь моделями собственно объекта управления, упрощаются. Прадлагаемая многомерная система управления обладает возмол ностыо коррекции нестационарного объекта п-то порядка по оценкам п-фазовых коордипат объекта и по «-отклонениям опенок фазовых координат от их эталонных .значений. При этом система управления позволяет избежать дифференцирования в явном виде сигналов измеренных фазовых координат объекта управления, что повышает помехозащищенность. Кроме того, она обладает возможностью реализации в виде набора идентичных блоков, выполненных на унифицированных аналоговых или цифровых элементах, например на операционных усилителях (интеграторах и сумматорах), а также возможностью использования нелинейных моделей объекта управления, учитывающих реальные ограничения типа насыщения, люфта и другие, что позволяет повысить требования к точности и качественным показателям системы управления, степени помехозащищенности и надежности действия системы управления. Предлагаемая система управления является реализацией идей создания системы, в которой выполняются задача изучения объекта и задача приведения объекта к требуемому режиму. При этом она обладает помехозащищенностью в том смысле, что высокочастотная помеха не подается непосредственно на вход объекта управления и не дифференцируется.
Предмет изобретения
Многомерная система автоматического управлепия нестационарным объектом, содержащая блок основного управления, выходы которого соединены со входами объекта управления и с основными входами модели оценки фазовых координат объекта управления, а первые входы - с выходами первых инверторов, выходы модели оценки фазовых координат объекта управления соединены через модели датчиков с первыми входами первых сумматоров, вторые входы которых соединены с датчиками фазовых координат объекта управления, а выходы первых сумматоров соединены со вспомогательными входами модели оценки фазовых координат объекта управления, отличающаяся тем, что с целью
расширения возможностей компенсации влияния параметров объекта управления на качественные Показатели системы управления при выполнении требования помехозащищенности, в систему введены модель-эталон объекта управления, вторые сумматоры, вторые инверторы и блок эталонного управления, выходы которого соединены со входами модели-эталона объекта управления и со вторыми вхо8
дами блока основного управления, выходы модели оценки фазовых координат соединены с первыми входами вторых сумматоров; выходы модели-эталона объекта управления соединены через вторые инверторы со входами блока эталонного управления и соединены со вторыми входами соответствующих вторых сумматоров, выходы которых соединены со входами первых инверторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МНОГОМЕРНЫМ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ1^ГНЛ"ФОВД | 1972 |
|
SU429642A1 |
| УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ОБЪЕКТАУПРАВЛЕНИЯ | 1972 |
|
SU429415A1 |
| Устройство для управления многомерным объектом | 1976 |
|
SU646309A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ УПРАВЛЕНИЯ С ИХ ИДЕНТИФИКАЦИЕЙ | 2015 |
|
RU2583746C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ СЛОЖНЫМИ ОРГАНИЗОВАННЫМИ ОБЪЕКТАМИ | 2010 |
|
RU2435187C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2062503C1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЕСТКОСТИ | 2001 |
|
RU2192035C1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ОБЪЕКТОВ УПРАВЛЕНИЯ | 2012 |
|
RU2486563C1 |
| Устройство для идентификации объекта | 1979 |
|
SU960741A1 |
| Устройство управления весовым порционным дозатором | 1981 |
|
SU1008625A1 |
и,к
Хе
