1
Изобретение относится к телемеханике и предназначено для телеуправления большим количеством распределенных контролируемых пунктов.
Известны системы телемеханики ближнего действия, содержащие управляющий распределитель, выходы которого соединены с соответствующими тактовыми шинами трехтактного распределенного переключателя, а вход - с выходом блока управления, первая шина питания блока управления соединена со всеми ячейками трехтактного распределенного переключателя, вторая - с входом первой ячейки его, третья - с нечетными исполнительными механизмами, четвертая - с четными исполнительными механизмами, все управляющие цепи исполнительных механизмов подключены к выходам соответствующих ячеек трехтактного распределенного переключателя, три выхода каждой ячейки через контакты датчиков контроля параметров подключены соответственно к трем щинам питания блока приема информации и индикации, выход которого соединен с первым входом блока управления, две схемы «ИЛИ, отключающий блок и блоки контроля максимального и минимального токов.
Структура известной системы обеспечивает непрерывный пошаговый контроль и защитное отключение при искажениях импульсов движения распределенного переключателя в любом числе проводов линий связи (помехи, обрывы, короткие замыкания). Однако подключение узлов контроля максимальных и
минимальных токов нагрузки к общей шине питания распределенного переключателя делает необходимым наличие изменяющихся уставок, шифраторов определения моментов выбора и переключения, схем совпадения. Это
значительно усложняет схему, увеличивает объем аппаратуры диспетчерского пункта, снижает надежность системы.
С целью упрощения системы и повыщения надежности в предлагаемой системе входы
блоков контроля максимального и минимального токов нагрузки через первую схему «ИЛИ подключены к тактовым щинам распределенного переключателя, а выходы через вторую схему «ИЛИ и отключающий блок- к второму входу блока управлепия.
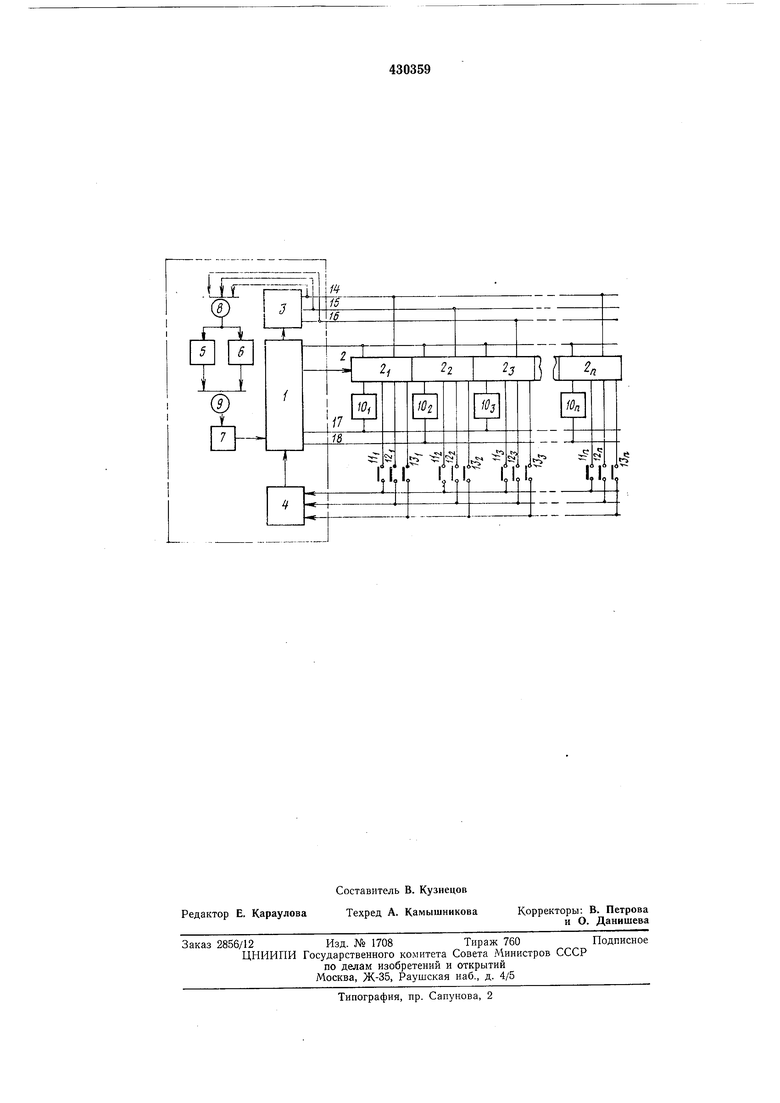
На чертеже показана схема предлагаемой системы телемеханики.
В нее входят блок управления 1, трехтактный распределенный переключатель 2(), управляющий распределитель 3, блок приема 4 информации и индикации, блоки контроля 5 и 6 соответственно максимальных и минимальных токов, отключающий блок 7, схемы «ИЛИ 8 и 9, исполнительные механизмы
lOi-lOn, датчики контроля параметров объектов 111-11„, 12i-12„ и 13i-13п.
Ячейки распределенного переключателя 2 являются элементами выбора объектов управления и контроля. Переключатель состоит из реле, коммутирующих цепи управления к исполнительным механизмам lOi-lOn и цепи сигнализации от датчиков контроля состояния объектов. Питание реле получают от искробезопасных источников по трем тактовым шинам 14, 15 и 16. Реверсивность переключателя достигается изменением порядка подачи питания в тактовые шины. Управление распределенным переключателем производится трехразрядным распределителем 3 по командам блока управления 1. Сигналы от датчиков контроля поступают в блок приема 4 информации и индикации, где расшифровываются и передаются в блок управления 1. В каждый момент времени в системе может находиться во включенном состоянии только один контролируемый пункт (исполнительный механизм). Отключается последний либо автоматически по сигналам датчиков контроля параметров объектов, либо оператором диспетчерского пункта путем снятия напряжения с шин 17 и 18.
Входы блоков контроля минимальных 6 и максимальных 5 токов нагрузки распределенного переключателя 2 через схему «ИЛИ подключены к тактовым шинам 14, 15 и 16. Уставки сраб-атывания блоков неизменны во времени. Блок контроля минимальных токов настроен на срабатывание при токе, меньшем тока одной ячейки, максимальных - при токе, большем тока одной ячейки. При нормальной работе распределенного переключателя через схему «ИЛИ 8 на входы блоков контроля 5 и 6 токов нагрузки подаются сигналы одинаковой величины как в момент выбора (включена одна ячейка), так и в момент переключения (включены две ячейки). При искажениях импульсов движения (обрыв или
короткое замыкание) в любом числе проводов линии связи в каждой из тактовых шин оказывается включенным число ячеек, не соответствующее заданному (либо менее одной ячейки, либо более одной). Ток нагрузки перестает соответствовать заданному, блок контроля тока нагрузки (минимального или максимального) срабатывает, и происходит защитное отключение системы.
Предмет изобретения
Система телемеханики ближнего действия, содержащая управляющий распределитель,
выходы которого соединены с соответствующими тактовыми шинами трехтактного распределенного переключателя, а вход - с выходом блока управления, первая шина питания блока управления соединена со всеми
ячейками трехтактного распределенного переключателя, вторая - с входом первой ячейки его, третья - с нечетными исполнительными механизмами, четвертая - с четными исполнительными механизмами, все управляющие цепи исполнительных механизмов подключены к выходам соответствующих ячеек трехтактного распределенного переключателя, три выхода каждой ячейки через контакты датчиков контроля параметров подключены
соответственно к трем шинам питания блока приема информации и индикации, выход которого соединен с первым входом блока управления, две схемы «ИЛИ, отключающий блок и блоки контроля максимальных и минимальных токов, отличающаяся тем, что, с целью упрощения системы и повышения падежности ее работы, в ней входы блоков контроля максимальных и мипимальпых токов через первую схему «ИЛИ подключены к тактовым шинам распределенного переключателя, а выходы через вторую систему «ИЛИ и отключающий блок - к второму входу блока управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ТЕЛЕМЕХАНИКИ БЛИЖНЕГО ДЕЙСТВИЯ | 1970 |
|
SU258426A1 |
| СИСТЕМА ТЕЛЕМЕХАНИКИ ДЛЯ ОБЪЕКТОВ С ИНЕРЦИОННЫМИ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ | 1973 |
|
SU393762A1 |
| УСТРОЙСТВО ТЕЛЕМЕХАНИКИ | 1969 |
|
SU238650A1 |
| Устройство для дистанционного управления перемещением секций шахтной гидрокрепи | 1984 |
|
SU1233200A1 |
| СИСТЕМА ТЕЛЕМЕХАНИКИ ДЛЯ УПРАВЛЕНИЯ ПЕРЕДВИЖКОЙ СЕКЦИИ ШАХТНОЙ ГИДРОКРЕПИ | 1969 |
|
SU245710A1 |
| Система телемеханики для управления передвижкой секций шахтной гидрокрепи | 1985 |
|
SU1269171A1 |
| Устройство для передачи и приема сигналов | 1975 |
|
SU551686A1 |
| ИОЗгЬт-lTA»Jv | 1973 |
|
SU372713A1 |
| ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО НА ЦИЛИНДРИЧЕСКИХ МАГНИТНЫХ ПЛЕНКАХ | 1968 |
|
SU231224A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГИДРОФИЦИРОВАННОЙ ШАХТНОЙ КРЕПЬЮ | 1973 |
|
SU362143A1 |