Изобретение относится к нодъемно-транспортной технике и может быть использовано при траиснортировке и кантовании, например, контейнеров с верхни1м наружным несущим поясом и грузовыми цапфами.
Известны захваты-квантовател.и для погрузки и выгрузки контейнеров с верхними наружными несущими .поясалш, содержащие П-об|разную траверсу, навещиваемую на крюк грузоподъемного .механизма, поворотный корнус, стойки с подхватными лапами, расиоложенные в кожухах, и дриводы поворота корпуса и стоек.
Целью изобретения является использовапие захвата-кантователя для подъема и кантования контейнеров, снабженных грузовыми ца.пфами, в нормальном и опрокинутом положениях. Это достигается тем, что поворотные стойки с .подхватными лапами выполнены с направляющими паза1ми для прохода цапф контейнера под углом к вертикальной плоскости и в нижней части проходящими по оси симметрпи стоек, а в верхней - смещенными относительно подхватных ла-п.
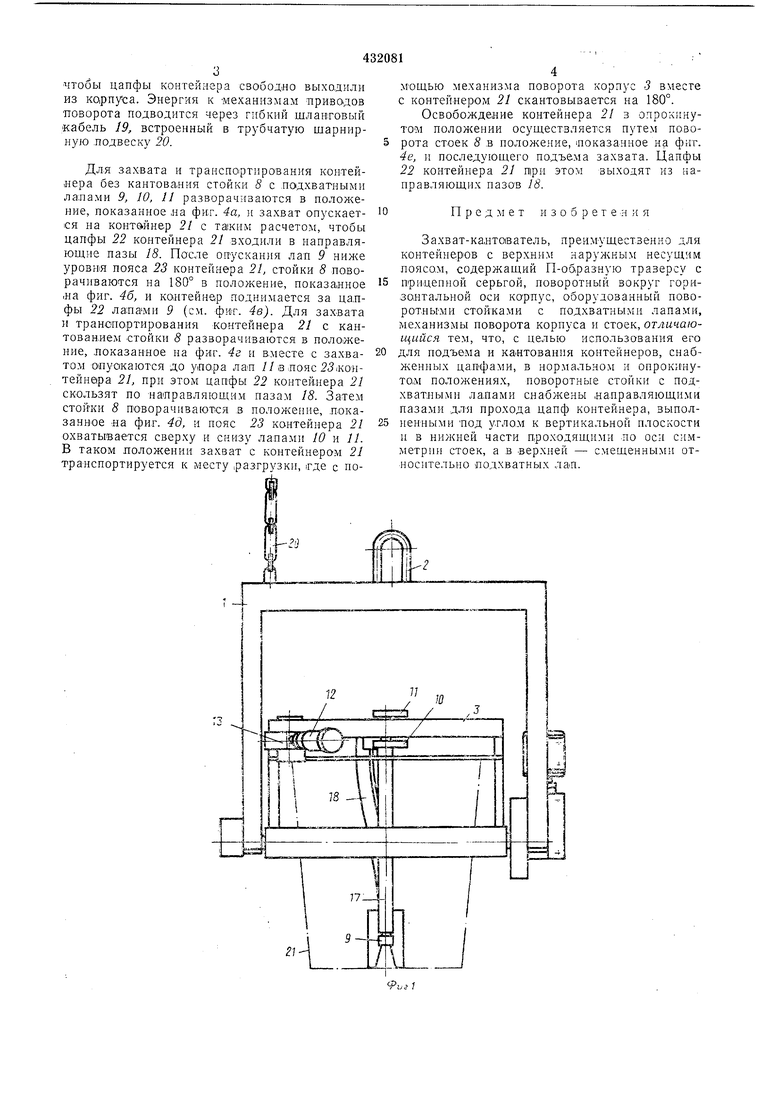
На фиг. 1 схематически изО:бражен описы1ваамый захват-кантователь; на фиг. 2 - то же, виа сбоку; на фиг. 3 - то же, вид сверху; на фиг. 4 - поворотная стойка с подхватными лапами в 1различнь х рабочих положениях.
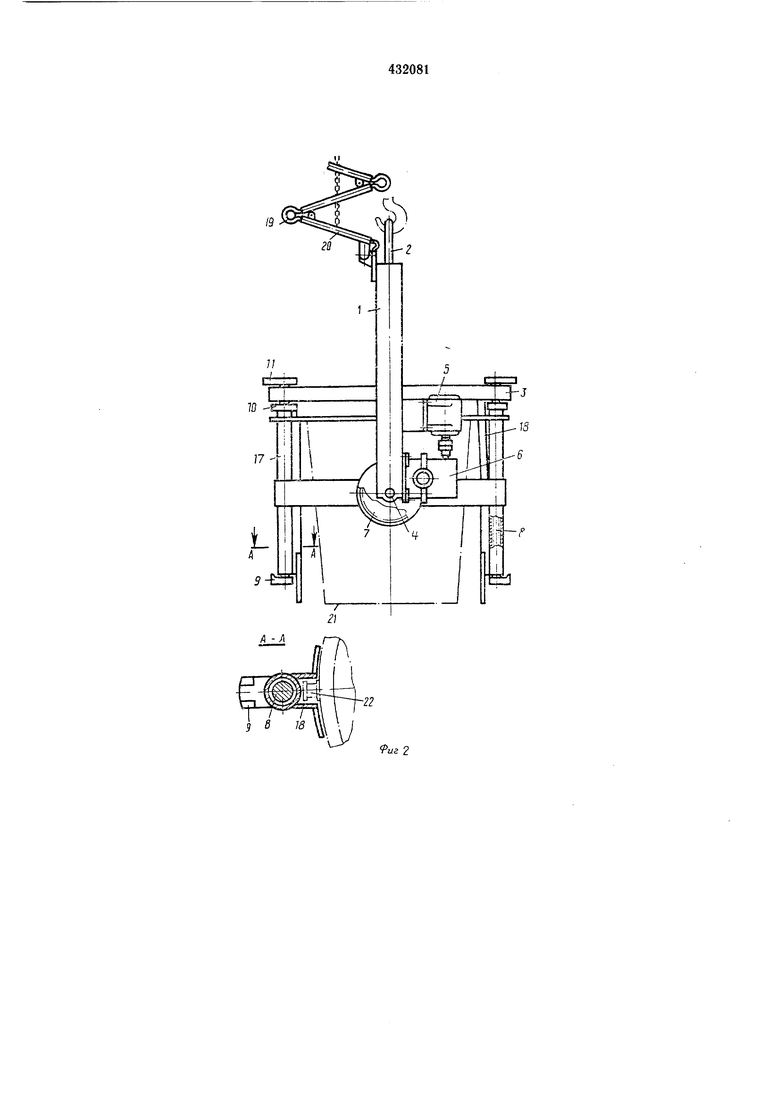
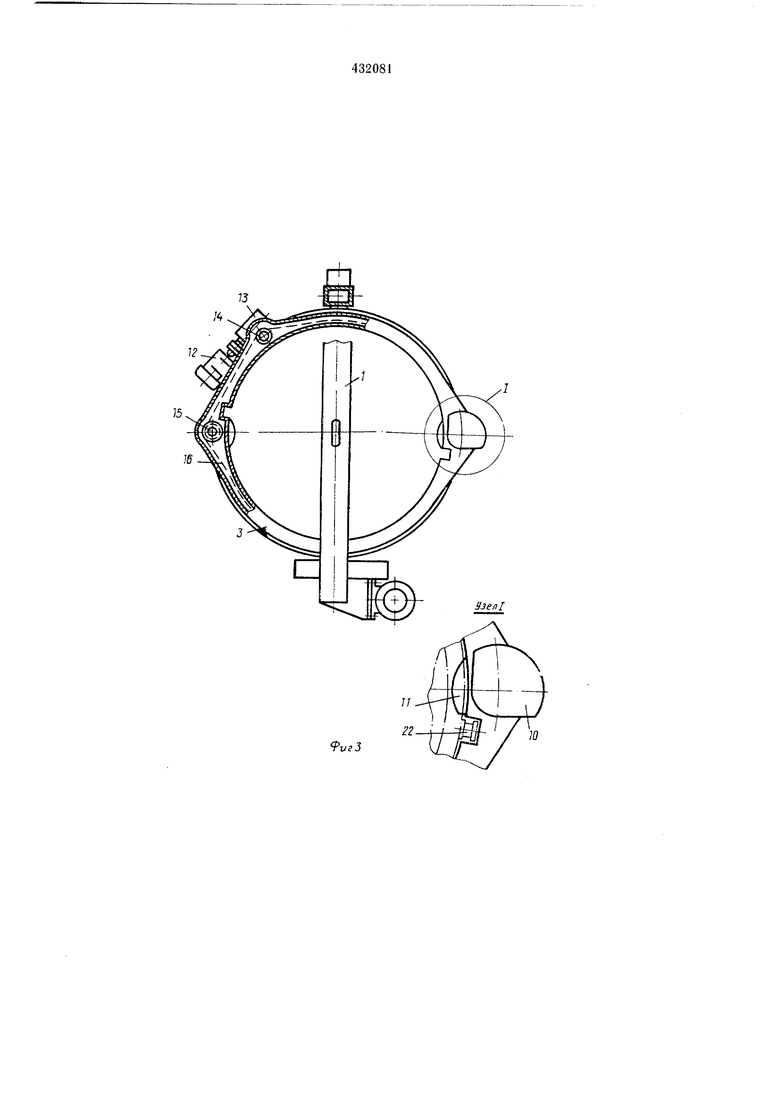
Захват содержит траверсу /, например, коробчатого сечения с .прицепной серьгой 2 п корпус 3, установленный в опорах траверсы / на горизонтальных осях 4. На траверсе 1 смонтирован механизм поворота корпуса 3, состоящий из электропривода 5, червячного редуктора 6 и -цилиндрической зубчатой передачи 7. Корпус 3 оборудован двумя поворотными стойками 8 с подхватными лаиами .9, 10 и 11, механиЗМОм поворота стоек, состоящим из электродв)гателя 12, червячного редукт&ра 13 и .цепной пере.дачп 14, 15 и 16, расположенной .по окружности корпуса. Механизмы поворота корпуса 3 н стоек 5 снабжены конеч,ны.ми выключателями (на че ртежах не показаны), ограничивающими угол lix поворота. Стойки в встроены в ;колсу.хп 17 с направляющими пазами 18, предназначенными для прохода цаиф контейнера, и жестко прикреплены к лоясам, образующ.им корпус 3 захвата-кантователя. Верхние подхватные лапы 10 и // расположены одна от друго на расстоянии, несколько превыщающел толщину наружного несущего пояса контейнера, и выполнены в виде секторов, пове рнутых один относительно другого на 90°. Направляющие .пазы 18 выполнены под углам к вертикальной плоскости и в нижней проходят по осп симметрии стоек 8, а в верхней - смещены относительно подхватных лап 10 и // с таким расчетом.
3
чтобы цапфы контейнера свободно выходили из корпуса. Энергия к -механизмам приводов поворота подводится через гибкий шланговый кабель 19, встроенный в трубчатую шарнирную лодвеску 20.
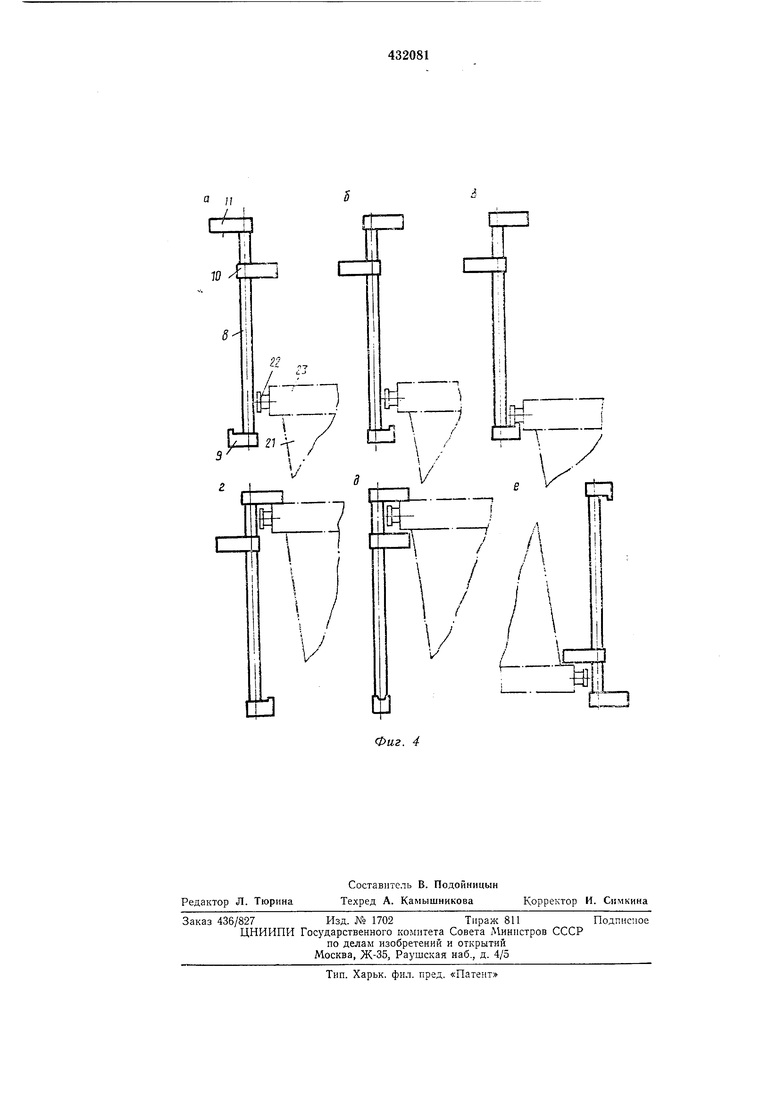
Для захвата и тpaнcпoipтиpoвaния контейнера без кантования стойки 8 с лодхватными лалами 9, 10, 11 разворачиваются в полон ение, показанное на фнг. 4а, и захват опускается на конт&йнер 21 с таким расчетом, чтобы цапфы 22 контейнера 21 зходили в направляющие пазы 18. После опускания лап 9 ниже уровня пояса 23 контейнера 21, стойки 8 ло,ворачиваются на 180° в положение, показанное .на фиг. 46, и каптейнор поднимается за цалфы 22 лапами 9 (см. фиг. 4в). Для захвата и транспортирования контейнера 21 с кантован.ием стойки 8 разворачиваются в положение, локазанное на фиг. 4г и в.месте с захватом опускаются до упора лап //в лояс 25iKOHтейнара 21, при этом цаифы 22 контейнера 21 скользят по направляющим пазам 18. Затем стойки 8 поворачиваются в положение, локазанное «а фиг. 4д, и пояс 23 контейнера 21 охватывается сверху и снизу лапами 10 и 11. В таком положении захват с контейнером 21 транспортируется к месту разтрузкн, где с помощью механизма поворота корпус 3 вместе с контейнером 21 скантовывается на 180°.
Освобождение контейнера 21 з опрокинутом положении осуществляется путем поворота стоек 8 в положение, показанное на фиг. 4е, и последующего подъема захвата. Цапфы 22 контейнера 21 цри этом выходят из наиравляющих пазов 18.
Предмет и з о б р е т е н и я
Захват-ка,нто1ватель, преимущестзенно для контейнеров с верхним наружным несущим ПОЯСО.М, содержащий П-оаразную траверсу с
прицепной серьгой, поворотный вокруг горизонтальной оси корпус, оборудованный поворотными стойками с подхватными лапа.ми, механизмы поворота корпуса и стоек, отличающийся тем, что, с целью использования его
для подъема и кантования контейнеров, снабженных цапфами, в нормальном и опрокинуТОЛ1 положениях, поворотные стойки с подхватными лалами снабл :ены направляющими пазами для прохода цапф контейнера, зыполненными ПОД угло.м к вертикальной плоскости и в нижней части проходящими по оси симметрии стоек, а в верхней - смещенными относительно подхватных лап.
fui 2
,Ч
9ve3
10
-п
СПИ
V
Фиг. 4
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ-КАНТОВАТЕЛЬ | 1971 |
|
SU293753A1 |
| Захват-кантователь для контейнеров с цапфами | 1989 |
|
SU1664720A1 |
| Захват-кантователь | 1989 |
|
SU1726358A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Захват-кантователь для контейнеров с цапфами на боковых стенках | 1986 |
|
SU1379232A1 |
| ЗАХВАТ ДЛЯ ЦИЛИНДРИЧЕСКИХ ГРУЗОВ | 1973 |
|
SU393193A1 |
| Захват-кантователь для литейных ковшей | 1981 |
|
SU956145A1 |
| Захват-кантователь для разливочныхКОВшЕй | 1977 |
|
SU806254A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ С ВЕРХНИМ НАРУЖНЫМ НЕСУЩИМ ПОЯСОМ | 1972 |
|
SU334161A1 |
| Захват-кантователь для грузов цилиндрической формы с центральным отверстием | 1989 |
|
SU1668272A1 |