I
Известны захваты для цилиндрических грузов, содержащие раму, на которой шарнирно закреплены поворотные подхватные лапы, и механизм фиксации захватных лап.
Однако при работе таких захватов происходит самоотцепление захватываемого контейнера при его транспортировке.
Целью изобретения является исключение самоотцепления захвата при установке груза и повышение надежности его работы.
Для этого механизм фиксации предлагаемого захвата выполнен IB виде подвижной относительно рамы с помощью привода, например пневмоцилиндра, траверсы с вертикальными пазами, нижняя часть которых снабжена скошенными зaплeчикaми-yпopaмиJ взаимодействующими при подъеме траверсы с выступами, выполненными на верхних концах подхватных лап для поворота их в нерабочее положение.
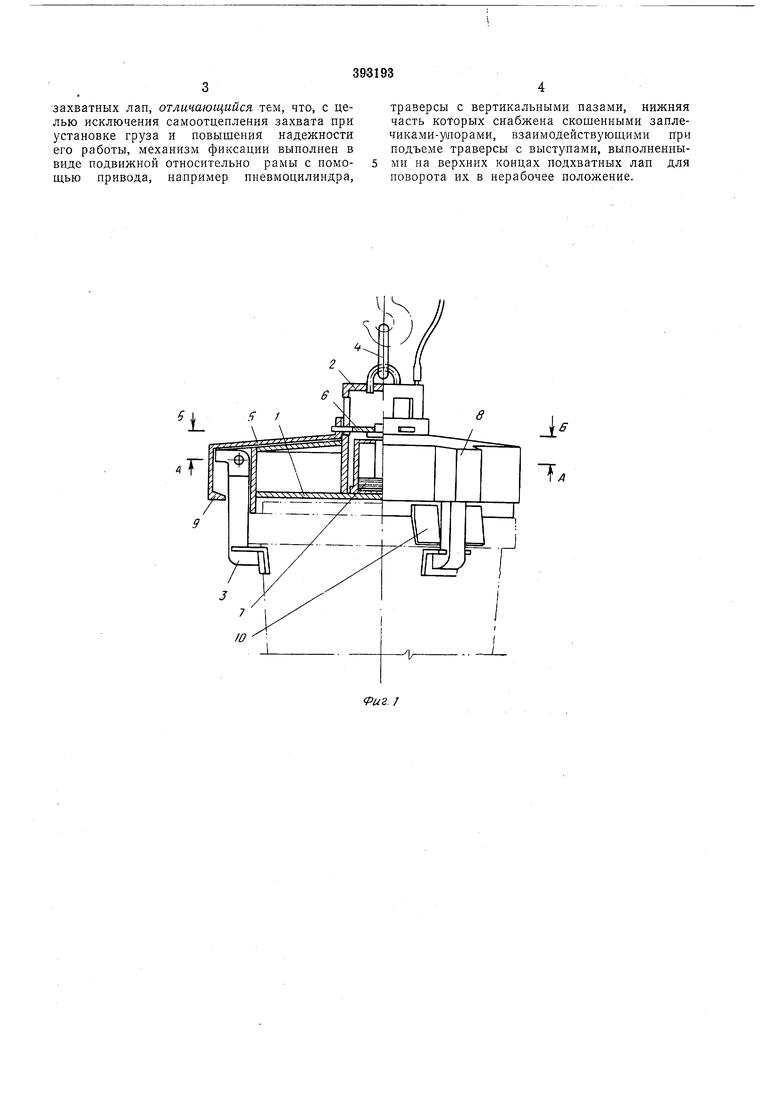
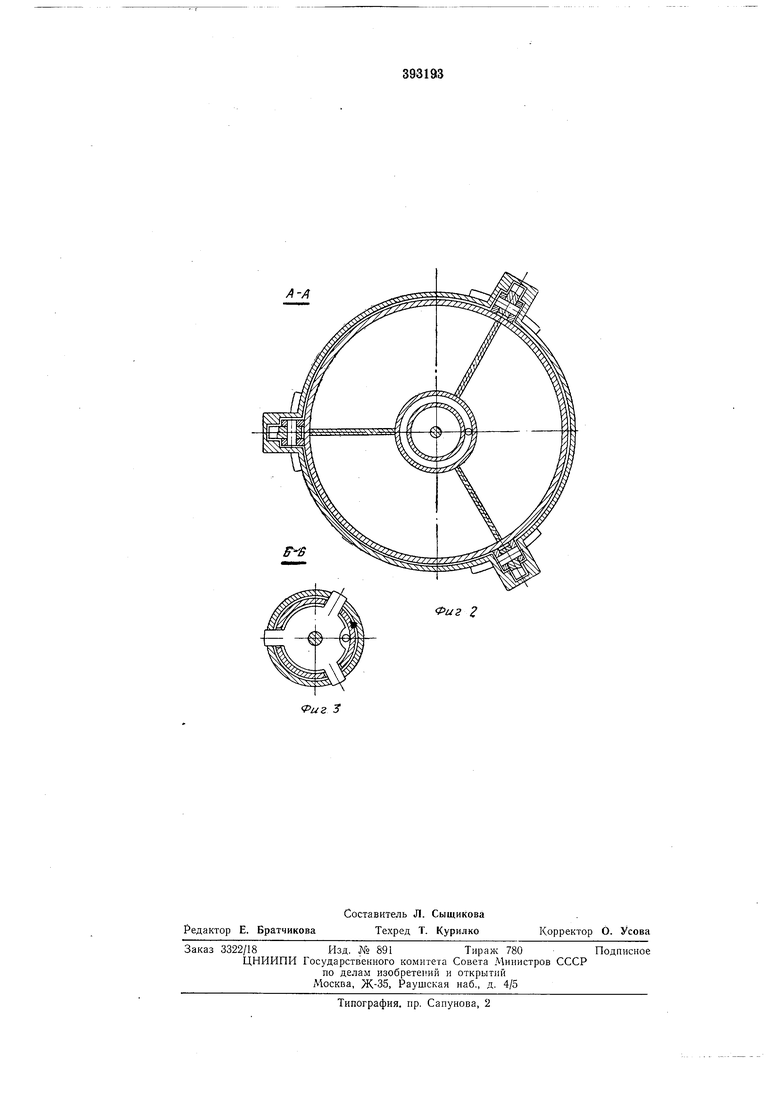
На фиг. 1 изображен общий вид. описываемого захвата; на фиг. 2 - разрез по А-А на фиг. 1; на фиг. 3 - разрез по Б-Б на фиг. 1.
Захват состоит из рамы 1, в центре которой помещена труба 2, а на наружной стороне рамы шарнирно установлены поворотные захватные рычаги 3. На трубе закреплено кольцо 4 для подвески захвата на грузовой крюк крана.
В верхней части рамы установлена подвижная траверса 5, опирающаяся на крестовину 6, укрепленную на штоке пневматического подъемника 7, расположенного в трубе.
На подвижной траверсе с наружной стороны образованы вертикальные пазы 8, выполненные со скошенными заплечиками 9, а на корпусе закреплены наклонные пластины Ю для центровки захвата.
Захват работает следующим образом.
В свободном положении траверса 5 стопорит захватные рычаги 3, препятствуя их повороту на оси. Воздух из цилиндра пневматического подъемника 7 выкачан. Перед установкой захвата на контейнер сжатый воздух нодается в цилиндр. При этом посредством крестовины 6 траверса 5 поднимается и заплечиками 9 поворачивает захватные рычаги. После установки на контейнер воздух из пневматического подъемника 7 выпускается, а траверса 5 под действием собственного веса опускается и стопорит захватные рычаги 5.
Предмет изобретения
Захват для цилиндрических грузов, преимущественно контейнеров с верхним наружным несущим поясом, содержащий раму, на которой шарнирно закреплены поворотные подхватные лапы, и механизм фиксации
захватных лап, отличающийся тем, что, с целью исключения самоотцепления захвата при установке груза и повышения надежности его работы, механизм фиксации выполнен в виде подвижной относительно рамы с помощью привода, например пневмоцилиндра.
траверсы с вертикальными пазами, нижняя часть которых снабжена скошенными заплечиками-уторами, взаимодействующими при подъеме траверсы с выступами, выполненными на верхних концах нодхватных лап для поворота их в нерабочее положение.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Автоматический захват | 1971 |
|
SU537020A1 |
| Грузозахватное устройство | 1986 |
|
SU1440841A1 |
| Захватное устройство для труб | 1979 |
|
SU885136A1 |
| Захватное устройство | 1982 |
|
SU1071562A1 |
| Захватно-разделительное устройство | 1981 |
|
SU1000373A1 |
| УСТРОЙСТВО для ЗАХВАТА ПАКЕТА ЛЕСОМАТЕРИАЛОВ | 1970 |
|
SU282145A1 |
| Автоматический захват | 1961 |
|
SU142740A1 |
| Грузозахватное устройство | 1982 |
|
SU1066931A1 |