1
Система может быть использована при отработке общего управляющего воздействия.
Известна двухканальная система автоматического регулирования с разделенной нагрузкой, содержащая привод грубого канала, привод точного канала, первый элемент сравнения, один вход которого является входом системы регулирования, другой вход подключен к выходу датчика обратной связи привода грубого канала, а выход через сумматор связан с входом привода грубого канала, и второй элемент сравнения. Один вход последнего связан с выходом первого элемента сравнения, другой вход подключен к выходу датчика обратной связи привода точного канала, а выход подсоединен к входу привода точного канала.
В такой системе уменьшение перемещения точной платформы, которая в частном случае может быть объектом регулирования точного канала, по отношению к грубой платформе, которая соответственно объект регулирования грубого канала (это необходимо, например, для повышения коэффициента использования поверхности антенны радиотелескопов и уменьшения геометрических размеров световодов оптических телескопов), может быть достигнуто лишь повышением точности работы автономного привода грубой платформы, что
приводит к уменьшению зоны линейности его и неудовлетворительным процессам согласования.
Предлагаемая система дополнительно содержит интегратор п-го порядка, выход которого подключен к входу сумматора, а вход - к выходу датчика обратной связи привода точной платформы. Это позволяет повысить точность и улучшить качественные показатели переходных процессов системы.
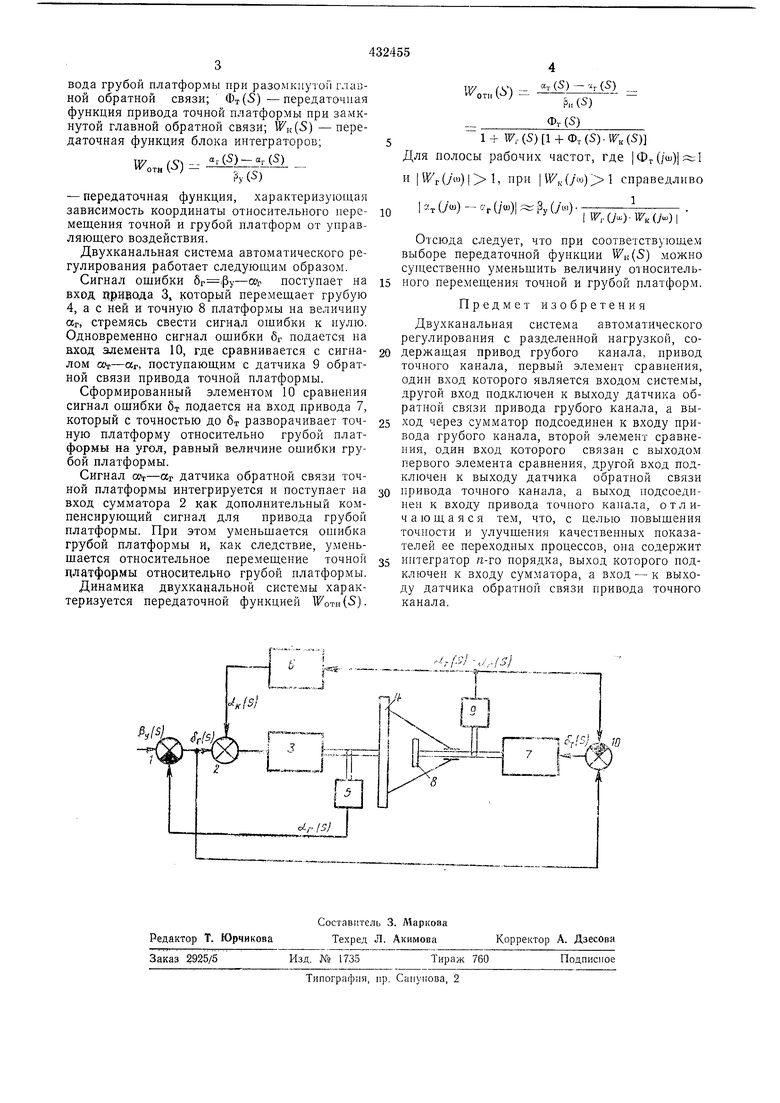
На чертеже показана блок-схема предлагаемой системы.
Система содержит элемент 1 сравнения, сумматор 2, привод 3 грубого канала, например грубой платформы 4, датчик 5 обратной связи привода грубой платформы, интегратор 6 п-то порядка, привод 7 точного канала, например точной платформы 8, датчик 9 обратной связи привода точной платформы и элемент 10 сравнения.
На чертеже и в тексте описания приняты следующие обозначения:
РУ - управляющее воздействие; ocv - регулируемая координата грубой платформы; регулируемая координата системы, определяющая абсолютное положение точной платформы; ак - выходная координата блока интеграторов; бг -ошибка привода грубой платформы; бт - ошибка привода точной платформы; Wr (5) передаточная функция при
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| Двухканальная следящая система с разделенной нагрузкой | 1975 |
|
SU553590A1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| Система регулирования скорости | 1983 |
|
SU1092465A1 |
| Трехканальная следящая система | 1989 |
|
SU1716479A1 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| Двухканальное регулирующее устройство | 1974 |
|
SU533909A1 |
| Бинарная система управления | 1988 |
|
SU1640670A1 |
| Двухканальная система с разделенной нагрузкой | 1984 |
|
SU1249476A1 |
