1
Изобретение относится к области автомагического регулирования и управления. Предлагаемое устройство относится к классу систем, определяющих неизвестные характеристики объекта регулирования, и предназначено, в частности, для идентификации характеристик динамической системы второго порядка.
Известно устройство для идентификации динамических систем второго порядка с двумя цепями самонастройки переменных характеристик модели - демпфирования и резонансной частоты. Каждая из цепей самонастройки содержит при этом систему, следящую за сдвигом фаз пробного синусоидального сигнала, а также устройство, определяющее рассогласование сдвигов фаз пробных синусоидальных сигналов на выходах объекта и модели.
Однако известное устройство имеет сложную схемную реализацию, так как для получения информации о сдвиге фаз в устройстве используется отдельный следящий коитур.
Иредлагаемое устройство для идентификации характеристик динамической системы второго порядка содержит, подобно известным, генератор пробных синусоидальных сигналов, соединенный со входами системы и модели системы и цепи самонастройки демпфирования и резонансной частоты модели, одни входы которых подключены к выходу системы, а другие - к выходу модели, а выходы соединены с интеграторами, выходы которых подключены к соответствующим управляющим входам модели.
С целью упрощения устройства на каждый из входов цепи самонастройки включено форсирующее звено, а на выход каждой цепи самонастройки- фазовый детектор, причем входы первого фазового детектора подключены ко входам цепи самонастойки резонансной частоты, а входы второго фазового детектора - к выходам форсирующих звеньев. Предлагаемое устройство содержит на б операционных усилителей и 4 множительных устройства меньше, чем известное.
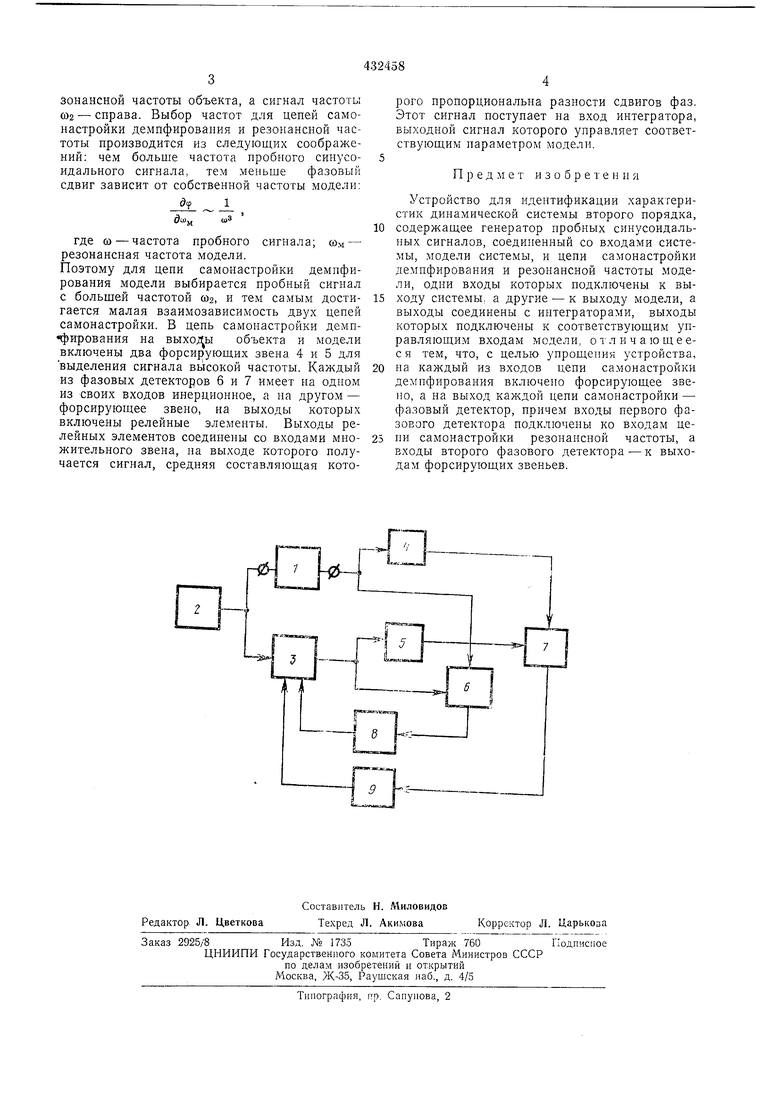
Иа чертеже приведена функциональная схема предлагаемого устройства. К клеммам исследуемого объекта 1 подключено предлагаемое устройство, которое содержит генератор 2 пробных синусоидальных колебаний, модель 3 объекта с двумя управляющими входами для перестройки двух параметров, два форсирующих звена 4 и 5, два фазовых детектора 6 и 7 и два интегратора 8 и 9.
Принцип действия предлагаемого устройства основан на использовании информации о сдвиге фаз пробных синусоидальных колебаний частот cui и (В2 исследуемым объектом и моделью. Исходя из априорной информации,
сигнал частоты coj располагается слева от резонансной частоты объекта, а сигнал частоты (02 - справа. Выбор частот для цепей самонастройки демпфирования и резонансной частоты производится из следующих соображений: чем больше частота пробного синусоидального сигнала, тем меньше фазовый сдвиг зависит от собственной частоты модели;
бш„U)S
где со - частота пробного сигнала; сОм - резонансная частота модели. Поэтому для цепи самонастройки демпфирования модели выбирается пробный сигнал с большей частотой (02, и тем самым достигается малая взаимозависимость двух цепей самонастройки. В цепь самонастройки демп«фирования на выходы объекта и модели включены два форсируюш,их звена 4 и 5 для выделения сигнала высокой частоты. Каждый из фазовых детекторов б и 7 имеет на одном из своих входов инерционное, а на другом - форсирующее звено, на выходы которых включены релейные элементы. Выходы релейных элементов соединены со входами множительного звена, на выходе которого получается сигнал, средняя составляющая которого пропорциональна разности сдвигов фаз. Этот сигнал поступает на вход интегратора, выходной сигнал которого управляет соответствующим параметром модели. 5
Предмет изобретен и я
Устройство для идентификации характеристик динамической системы второго порядка,
0 содержащее генератор пробных синусоидальных сигналов, соединенный со входами системы, модели системы, и цепи самонастройки демпфирования и резонансной частоты модели, одни входы которых подключены к выходу системы, а другие - к выходу модели, а выходы соединены с интеграторами, выходы которых подключены к соответствующим управляющим входам модели, отличающеес я тем, что, с целью упрощения устройства,
0 на каждый из входов цепи самонастройки демпфирования включено форсирующее звено, а на выход каждой цепи самонастройки - фазовый детектор, причем входы первого фазового детектора подключены ко входам цепи самонастройки резонансной частоты, а входы второго фазового детектора - к выходам форсирующих звеньев.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический регулятор резонанс-НОгО СОСТОяНия КОНТуРА НулЕВОйпОСлЕдОВАТЕльНОСТи СЕТи | 1979 |
|
SU813585A1 |
| Устройство коррекции для компенсации упругого резонанса в электромеханических системах | 1981 |
|
SU991365A1 |
| Система автоматической идентификации | 1978 |
|
SU930270A1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| Устройство для автоматической настройки катушки индуктивности с подмагничиванием | 1978 |
|
SU771795A1 |
| САМОНАСТРАИВАЮЩЕЕСЯ УСТРОЙСТВО | 1969 |
|
SU240816A1 |
| Система управления с упругой механической связью | 1977 |
|
SU717717A1 |
| САМОНАСТРАИВАЮЩИЙСЯ РЕЗОНАНСНЫЙ ФИЛЬТР | 1973 |
|
SU382064A1 |
| Устройство для идентификации нелинейных систем | 1976 |
|
SU638919A1 |
| Поисковый регулятор для резонансной настройки контура нулевой последовательности сети | 1982 |
|
SU1080231A1 |
