1
Изобретение относится к области кузнечяопрессового оборудования и может быть использовано в М1ногопозиционных высадочных автоматах.
Известен механизм переноса заготовок к многопозиционным высадочным прессам-автоматам, содержащий смонтированную в станине автомата приводную от кулака каретку, несущую на себе держатели, на одном конце которых закреплены захватные пальцы, а другие их концы связаны с индивидуальными приводами перемещения.
С целью увеличения числа рабочих ходов за счет снижения инерционной м.ассы кареткп в предлагаемом механизме каретка выполнена в виде щарнирно закрепленных на станине последовательно установленных U-образных рычагов, охватывающих держатели, и соединяющих между собой рычаги подпружиненных тяг, а кулак привода каретки имеет две поверхности различной кривизны, соответственно контактирующие с крайними рычагами через допол1Н«тельные укрепленные на них ролики.
Кроме того, на концах держателей, связанных с приводом, шарнирно закреплены дополнительные рычаги, причем оси их закрепления совпадают с осями повората рычагав, образующих каретку, при крайнем положении держателей.
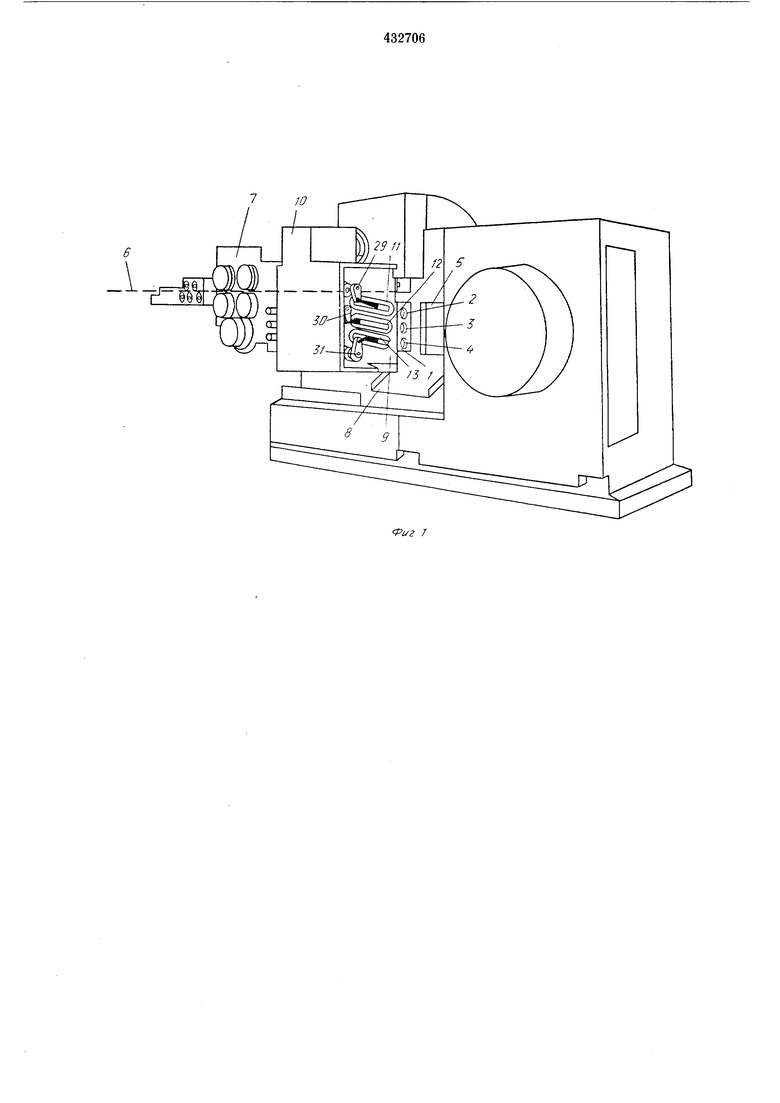
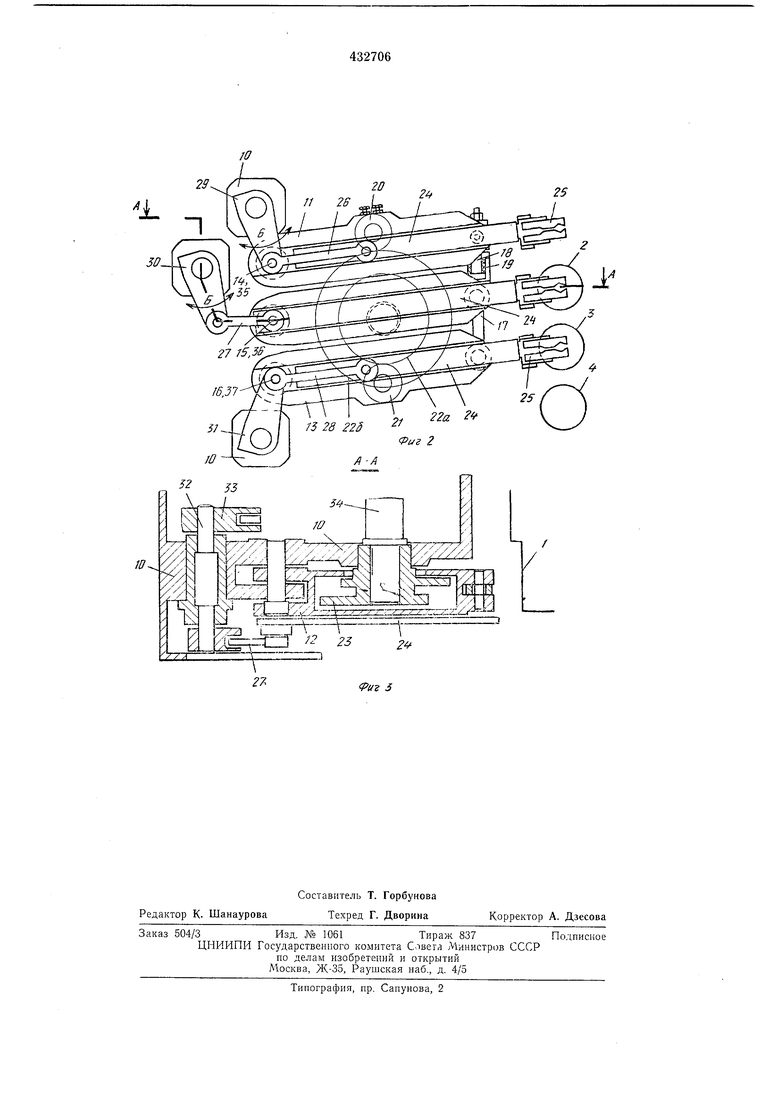
На фиг. 1 изображен многопозиционный высадочный автомат с механизмом переноса в аксонометрии; на фиг. 2 - механизм переноса; на фиг. 3 - разрез по А-А.
Многопозиционный автомат для изготовления, например, болтов, имеет блок матриц 1 с тремя расположенными одна над другой матрицами 2, 3 и 4. Против указанных матриц помещена каретка 5, несущая пуансоны, движущаяся возвратно-лоступательно, в направлении к матрицам и от них. В матрицах постепенно высаживаются изделия из прутковой заготовки 6, подаваемой устройством 7 и отрезаемой не изображенным здесь устройством.
Готовое изделие удаляется из пресса по лотку 8. Для перемещения изделия или заготовки от отрезающего устройства в первую матрицу, а затем из одной матрицы в другую служит механизм переноса 9, помещенный на агрегатном корпусе станины 10.
Один над другим расположены рычаги И, 12 и 13, поворачивающиеся вокруг осей 14, 15 и 16, а один конец этих рычагов помещен
на станиНе 10. Эти рычаги соединены между собой параллельными тягами 17 и 18, содержащими нружинную систему 19.
На рычагах 11 и 12 имеются вращающиеся ролики 20 и 21, откатывающиеся по кривым 22а и 226 кулачкового механизма 23. Кривые 22а и 226 схематически изображены на фиг. 2 в виде окружностей, что, однако, не соответствует действительности. Кривые противонаправленно проходят так, что при вращении кулачкового механизма создается качательное движение рычагов вокруг их осей 14, 15 и 16.
В рычагах 11, 12 и 13 помещены держатели 24 с возможностью их перемещения вдоль рычагов. На свободных концах указанных держателей помещены захватные пальцы 25, а вторые концы держателей связаны € соединительными рычагами 26, 27 и 28, взаимодействующими с п:риводными рычагами 29, 30 и 31.
Нрнводные рычаги приводятся в возвратнопоступательное движение в направлениях, показанных стрелками Б, причем это движение сообщается держателям вместе с помещенными на них захеатныМИ пальцами.
Как изображено на фиг. 3, привод рычагов 29, 30 и 31 осуществляется через валы 32, которые через передаточный рычаг 33 связаны с кулачковым механизмом (на чертеже не показан); 34 - приводной вал для кулачкового механизма 23.
На фиг. 2 изображено крайнее положение держателей зах1ватных пальцев, причем в этом положении пальцы находятся до тех пор, пока они захватывают изделие из матриц 2 и 3 и расположены точно над центром указанных матриц. В этом переднем положении держателей оси 14, 15 и 16 рычагов 11, 12 и 13 совпадают с точками закрепления 35, 36 и 37 соединительных рычагов 26, 27 и 28.
Работа механизма осуществляется следующим образом.
При вращении кулачкового механизма 23 рычаги 11, 12 и 13 совершают качательное движение, благодаря чему рычаги из изображенного на фиг. 2 положения поворачиваются до тех пор, пока захватные пальцы 25 также не сместятся дальше вниз. В этом положении держатель с захватными пальцами находится на уровне матрицы 4, а остальные захватные пальцы соответственно на уровне матриц 3 и 2. Движение держателей происходит известным образом.
Предмет изобретения
1. Механизм nepenoica заготовок к многопозиционным высадочным прессам-автоматам, содержащий смонтированную в станине автомата приводную от кулака каретку, несущую на себе держатели, на одном конце которых закреплены захватные пальцы, а другие их концы связаны с индивидуальными приводами перемещения, отличающийся тем, что, с
целью увеличения числа рабочих ходов за счет снижения инерционной массы каретки, последняя выполнена в виде шарнирно закрепленных на станине последовательно установленных U-образных рычагов, охватывающих
держатели, и соединяющих между собой рычаги подпружиненных тяг, а кулак привода каретки имеет две поверхности различной кривизны, соответственно контактирующие с крайними рычагами через дополнительные укрепленные на них ролики.
2. Механизм по п. 1, отличающийся тем, что на концах держателей, связанных с приводом, шарнирно закреплены дополнительные рычаги, причем оси их закрепления савпадают с осями поворота рычагов, образующих каретку, при крайнем положении держателей.
и 5
| название | год | авторы | номер документа |
|---|---|---|---|
| ХОЛОДНО-ВЫСАДОЧНЫЙ АВТОМАТ МНОГООПЕРАЦИОННОГОДЕЙСТВИЯ | 1972 |
|
SU354639A1 |
| Механизм переноса заготовок | 1976 |
|
SU664738A1 |
| УСТРОЙСТВО для ПЕЧАТИ НА ПЛОСКИХ ИЗДЕЛИЯХ | 1973 |
|
SU376925A1 |
| Механизм переноса заготовок многопозиционных высадочных автоматов | 1978 |
|
SU738742A1 |
| Холодновысадочный автомат | 1978 |
|
SU710740A1 |
| Автомат для изготовления гвоздей | 1979 |
|
SU1039625A1 |
| УСТРОЙСТВО ДЛЯ ПЛЮЩЕНИЯ и ФОРЛЮВАНИЯ ЗУБЬЕВ ПОЛОТЕН ПИЛ | 1972 |
|
SU324738A1 |
| Механизм переноса заготовок к многопозиционному высадочному автомату | 1980 |
|
SU975168A1 |
| МЕХАНИЗМ ПЕРЕНОСА МНОГОПОЗИЦИОННЫХ ХОЛОДНОВЫСАДОЧНЫХ АВТОМАТОВ | 1973 |
|
SU366912A1 |
| ТЕ...О- ..^'^X'-vii,r:.,v П':^'А | 1967 |
|
SU190819A1 |