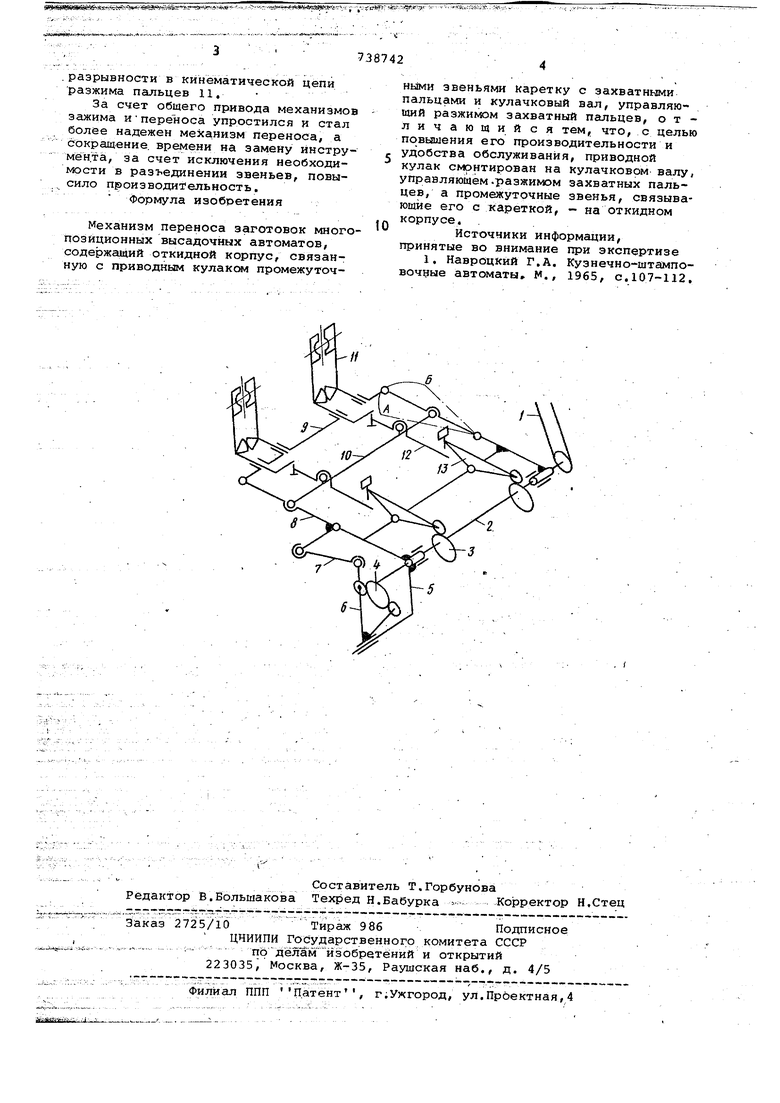
(54) МЕХАНИЗМ ПЕРЕНОСА ЗАГОТОВОК МНОГОПОЗИЦИОННЫХ ,ВЫСАДОЧНЫХ АВТОМАТОВ Изобретение отнЪсится к кузнечно npecioBOMy оборудованию и может быт использовано для межоперационного транспортирования заготовок по пози циям высадочного автомата. Известен механизм переноса заготовок многопозиционных высадочных автоматов, содержащий откидной корпус, связанную с приводным кулаком промежуточными звеньями каретку с захватными пальцами и кулачковый вал, управляющий разжимом захватных пальцев 1. Однако известный механизм недост точно производителен и удобен а обслуживании, так как при замене инст румента нужно производить демонтаж механизма, Цель Изобретения - повышение про изводительности и удобства обслуживания.. Эта цель достигается за счет тог что рриводной кулак смонтирован на кулачковом валу, управляющем разжи мом захватных пальцев, а промежуточ ные звенья, связывающие его с кареткой, - на откидном корпусе. На чертеже изображена кинемати. ческа я схема механизма переноса. Механизм содержит общий привод 1 от коленчатого вала автомата (на чертеже не показан), кулачковый вал 2 с кулачками 3 разжима захватных пальцев и приводным кулаком 4, -откидной корпус 5 с рычагом 6, тягой 7 и кареткой -четырехзвенником 13-9-10. Звено В кинематически связано с приводным кулаком 4, звено 9 несет захватные пальцы 11, а в звене 10 смонтированы рычаги 12 для разжима захватных пальцев.- Другие рычаги 13 для разжима захватных пальцев смонтированы на откидном корпусе 5. Механизм переноса работает следующим образом. От коленчатого вала (на чертеже не показан), благодаря приводу 1, например, цепной передаче, вращается кулачковый ВсШ 2 и через рычаг 6 и тягу 7 перемещает каретку-четырех3венник 8-9-10 по дуге окружности из позиции А в позицию Б. Захватные пальцы 11 в этот момент переносят заготовку, причем в нужный момент захватные пальцы захватывают или освобождают заготовку благодаря кулакам 3 и рычагам 12, смонтированным в звене 10 и перемещаюсоимся с четырехзвенником с целью сохранения не4,abSM4P«l 9i:iC5 «i..-i
.разрывности в кинематической цепи разжима пальцев 11,
За счет общего привода механизмов зажима ипереноса упростился и стал более надежен механизм переноса, а сокращение, времени на замену инструмента, за счет исключения необходимости в разъединении звеньев, повысило производительность.
Формула изобретения
Механизм переноса заготовок многопозиционных высадочных автоматов, содержащий откидной корпус, связанную с приводным кулаксм промежуточ738742
ными звеньями каретку с захватными пальцами и кулачковый вгш, управляющий разжимом захватный пгшьцев, отличающийся тем, что, с целью повышения его производительности и удобства обслуживания, приводной кулак смонтирован на кулачковом валу, управляющем.разжимом захватных пальцев, а промежуточные звенья, связывающие его с кареткой, - на откидном корпусе. . .
Источники информации, принятые во внимание при экспертизе
1, Навроцкий Г.А. Кузнечно-штамповочуые автоматы М., 1965, с.107-112,
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПЕРЕНОСА ЗАГОТОВОК КМНОГОПОЗНЦИОННЫМ ВЫСАДОЧНЫМ ПРЕССАМ-АВТОМАТАМ | 1972 |
|
SU432706A3 |
| Привод механизма переноса для многопозиционных штамповочных автоматов | 1985 |
|
SU1328047A2 |
| Устройство для переноса заготовок | 1980 |
|
SU980916A1 |
| Холодновысадочный автомат | 1978 |
|
SU710740A1 |
| Устройство для переноса заготовок в многопозиционном высадочном автомате | 1980 |
|
SU958031A1 |
| Холодновысадочный автомат | 1978 |
|
SU680798A1 |
| Холодновысадочный автомат | 1980 |
|
SU860934A1 |
| Механизм переноса заготовок | 1987 |
|
SU1547931A1 |
| Автомат для горячей высадки изделийСТЕРжНЕВОгО ТипА | 1979 |
|
SU814543A1 |
| Механизм переноса заготовок к многопозиционному высадочному автомату | 1980 |
|
SU975168A1 |
