1
ИзОбретение относится к области кузнечнопрессового оборудования и может быть использована при изготовлении болтов, заклепок и тому подобных деталей.
Известен механизм -переноса многопозиционных холодновысадочных автоматов, содержащий каретку, на которой смонтированы корпуса с шарнирно закрепленными пружинными лальцами, имеющими калибр для захвата заготовки.
Предлагаемый механизм от известного отличается тем, что на каждом пружинном пальце со сто-роны последующей позиции предусмотрен выступ, обеспечивающий поворот пальцев .при контакте с невытолкнутой загоТОВ1КОЙ, а механизм снабжен жестко закрепленными на корпусах планками, отсекающими заготовки при повороте пальцев. Это предохраняет механизм от поломки при наличии иевытолкнутой заготовки в высадочной матрице.
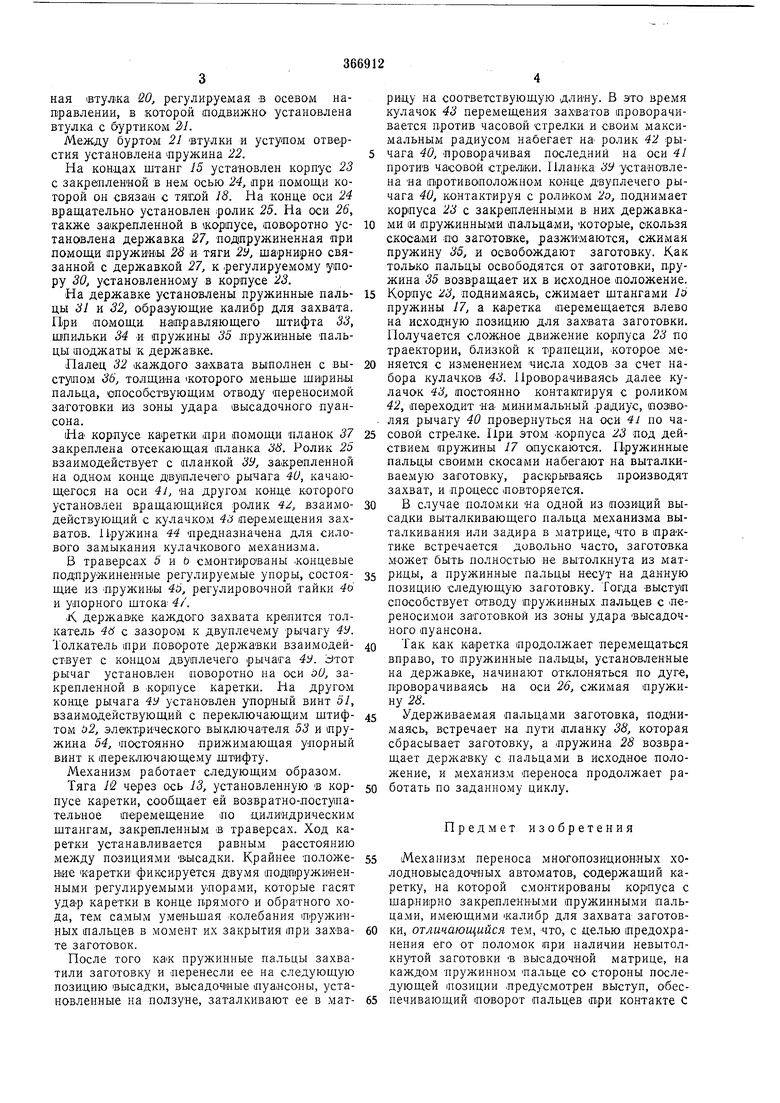
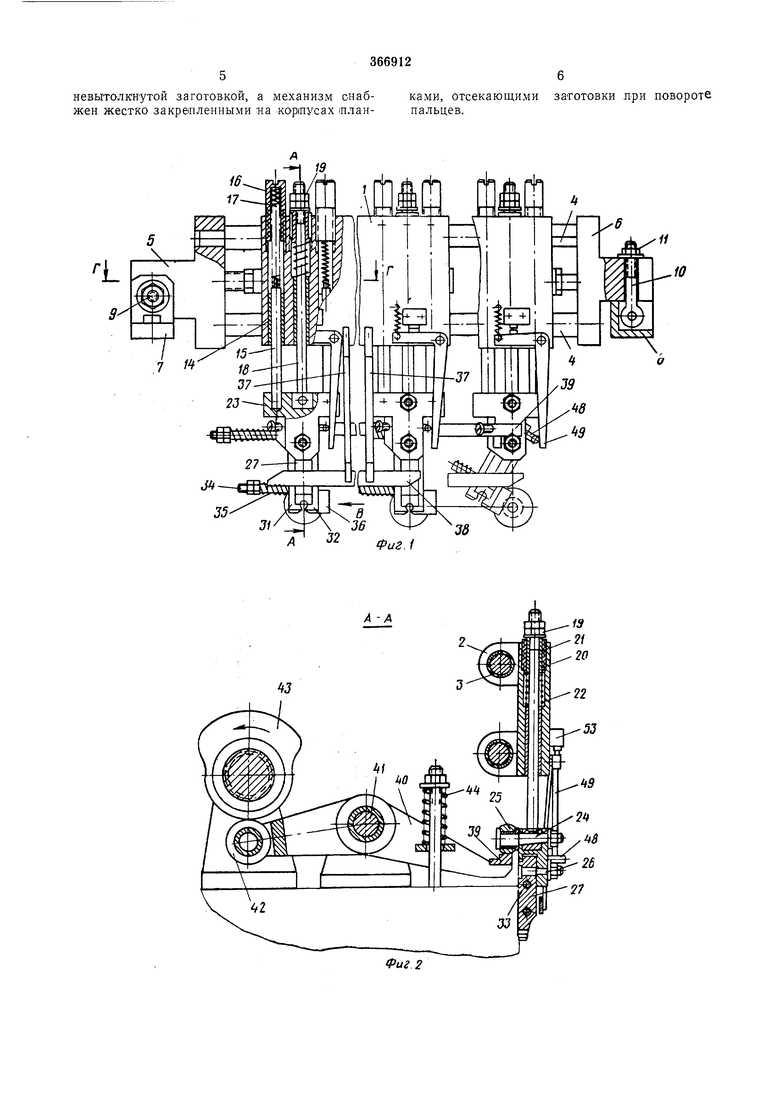
На фиг. 1 изображен п-редлагаемый механизм переноса; на фиг. 2 - разрез по А - Л на фиг. 1; на фиг. 3 - узел захвата в увеличенпом -м-асштабе; на фит. 4 - разрез по Б-Б на фиг. 3; «а фиг. 5--вид по стрелке В на фиг. 1; на фиг. 6-раврез по Г-Г на фиг. I. Механизм переноса состоит из каретки /, ппедставляющей собой прямоугольный корпус, имеющий с тыльной стороны проущины
2 с цилиндрическими отверстиями с установленными в них направ аяющими втулками 3, при помощи которых каретка установлена на двух цилиндрических щтангах 4, стянутых траверсамп 5 и 6, образуя направляющую рамку.
Направляющая рамка крепится к станине при помощи кронщтейнов 7 и 8. При этом на кронштейне 7 она установлена щарнирно при помощи оси 9, а К кронштейну 8 прижата откидным болтом 10 и гайкой 11.
Каретка получает возвратно-поступательное перемещение от кулачкового привода («а чертеже не указанного) при помощи тяги 12, шарнирно установленной на оси 13, закрепленной в корпусе каретки.
В а орпусе каретки выполнен ряд вертикальных отверстий, сгруппированных по три отверстия на каладый захват. В нижней части отверстия запрессованы направляющие втулки 14, а в верхней части нарезана резьба.
В крайних отверстиях каждой группы установлены направляющие штанги 15, а в верхней части этих отверстий «винчены стасканы 16. штангами и стаканами установлены 17 сЛсатия.
В середине отверстия калсдой группы установлена тяга 18, на одном конце которой нарезана резьба для гаек 19. В верхней резьбовой части среднего отверстия ввинчена упо-рная втулка 20, регулируемая в осевом направлении, в которой 1ПОДВИЖНО установлена втулка с буртиком 2il.
Между буртом 21 втулки и уступом отверстия установлена лружина 22.
На кон.цах штанг 15 установлен корпус 23 с закрепленной в нем осью 24, при помощи которой он связаи с тяглй 18. На конце оси 24 вращательно установлен ролик 25. На оси 26, также закрепленной в жорпусе, поворотно установлена державка 27, подпружиненная три помощи иружинъ 28 и тяги 2У, шарнирно связанной с державкой 27, к .регулируемому упору 30, установленному в корпусе 23.
На державке установлены пружинные пальцы 31 и 32, образующие калибр для захвата. П|ри (ПОМОЩИ направляющего щтифта 33, шпильки 34 -и пружины 35 пружинные пальцы шоджаты к державке.
Палец 32 .каждого захвата выполнен с выCTyinoM 36, толщиНа которого меньше ширины пальца, опособсгвующим отводу переносимой заготовки из зоны удара высадочного пуансона.
(На корпусе каретки при помощи планок 37 закреплена отсекающая планка ЗЗ. Ролик 25 взаимодействует с планкой ЗУ, за1крепленной на одном конце двуплечего- рычата 40, качающегося на оси 41, «а друго.м конце которого установлен вращающийся ролик 42, взаимодействующий с кулачком 4д перемещения захватав. Пружина 44 предназначена для силового замыкания кулачкового механизма.
В траверсах 5 и смонтированы «онцевые подпружиненные регулируемые упоры, состоящие из -пружины 45, регулировочной гайки 46 и упорного штока- 4/.
-К державке каждого захвата крепится толкатель 4( с зазорОМ к двуплечему рычагу 4У. Толкатель при повороте державки взаимодейст-вует с концом двуплечего рычага 4У. Ьтот рычаг установлен поворотно на оси ЬО, закрепленное в .корпусе каретки. На друго-м конце рычага 4У установлен упорный винт 51, взаимодействующий с переключающим штифтом й2, электрического выключателя 53 и пружина 54, постоянно прижимающая упорный винт к переключающему штифту.
Механизм работает следующим образом.
Тяга 12 через ось 13, установленную в корпусе каретки, сообщает ей возвратно-поступательное перемещение по цилиндрическим штангам, закрепленным в траверсах. Ход каретки устанавливается равным расстоянию между позициями высадки. Крайнее положеНйе каретки фиксируется двумя подтружиненными регулируемыми упорами, которые гасят удар каретки в конце прямого и обратного хода, тем самым уменьшая колебания пружинных пальцев в момент их закрытия при захвате заготовок.
После того KaiK пружинные пальцы захватили заготовку и перенесли ее на следующую позицию высадки, высадочные пуаисо-ны, установленные на ползуне, заталкивают ее в магрицу на соответствующую длину. В это время кулачок 43 перемещения захватов проворачивается против часовой стрелки и сво-им максимальным радиусом набегает на- ролик 42 рычага 40, проворачивая последний на оси 41 против часовой стрелки. План-ка 39 установлена на противоположном конце двуплечего рычага 40, ко-нтактируя с роликом 2о, поднимает корпуса 23 с закрепленными в них державками (И шруж-иннымй пальцами, которые, скользя скосами ПО заготовке, разжимаются, сжимая пружину 36, и освобождают заготовку. Как только пальцы освободятся от заготовки, пружина 35 возвращает их в исходное положение. Корпус 3, поднимаясь, сжимает штангами 15 пружины 17, а каретка перемещается влево на исходную позицию для захвата заготовки. Получается сложное движение корпуса 23 по траектории, близкой к трапеции, -которое меняется с изменением числа ходов за счет набора кулачков 43. Проворачиваясь далее кулачок 43, постоянно контактируя с роликом 42, пе реходит н-а минимальный радиус, позволяя рычагу 40 провернуться на оси 41 по часовой стрелке. При этом .корпуса под действием пружины 17 опускаются. Пружинны-е пальцы своими скосами набегают на выталкиваемую заготовку, раскрываясь .производят захват, и процесс повторяется.
В случае поломки на одной из позиций высадки выталкивающего пальца механизма выталкивания или задира в .матрице, что в практике встречается довольно часто, заготовка может быть полностью не вытолкнута из матрицы, а пружинные пальцы несут на данную позицию следующую заготовку. Тогда -выступ способствует отводу иружин-ных пальцев с переноси.мои заготовкой из зоны удара высадочного Пуансона.
Так как каретка продолжает перемещаться вправо, то пружинные пальцы, установленные на державке, начинают отклоняться по дуге, проворачиваясь -на оси 26, сжимая пружину 28.
Удерживаемая пальцами заготовка, поднимаясь, встречает на пути планку 38, которая сбрасывает заготовку, а .пружина 28 возвращает державку с пальца.ми в исходное положение, и механизм П-ереноса продолжает работать по заданному циклу.
Предмет изобретения
Механизм переноса многопозициониых холодновысадачных автоматов, содержащий каретку, на которой смонтированы корпуса с шар-нирно закр-епленными пружинными пальцами, им-еющими Калибр для захвата заготовки, отличающийся тем, что, с целью предохранения его от поломок при наличии невытолкнутой заготовки В вы-садочно-й матрице, на каждом пружинном пальце со стороны последующей позиции .предусмотрен выступ, обеспечивающий поворот пальцев при контакте с 5 не вытолкну то и заготовкой, а механизм с-набжен жестко закрепленными на корпусах шлан6ками, отсекающими заготовки при повороте пальцев.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ГВОЗДЕЙ | 1992 |
|
RU2019351C1 |
| Устройство для переноса заготовок в многопозиционном высадочном автомате | 1980 |
|
SU958031A1 |
| Грейферное устройство для подачи заготовок к прессу | 1989 |
|
SU1719134A1 |
| Устройство для высадки | 1981 |
|
SU996027A1 |
| Механизм переноса заготовок многопозиционных холодновысадочных автоматов | 1978 |
|
SU740374A1 |
| Автомат для двусторонней высадки | 1979 |
|
SU1107945A1 |
| Механизм переноса многопозиционного высадочного автомата | 1986 |
|
SU1442321A1 |
| АВТОМАТ ГОРЯЧЕВЫСАДОЧНЬШ ДЛЯ ИЗГОТОВЛЕНИЯ ФАСОННЫХ ДЕТАЛЕЙ, НАПРИМЕР ГАЕК | 1965 |
|
SU176476A1 |
| ПРЕСС-АВТОМАТ ДЛЯ ДВУСТОРОННЕГО \ ХОЛОДНОГО ВЫДАВЛИВАНИЯВПТБ[^ ^^.'." 'з T't Г Г" Т f " .•' ''' '.'.. •;' iT' (^ 5 * | 1971 |
|
SU424647A1 |
| Устройство для переноса заготовок к многопозиционному высадочному автомату | 1986 |
|
SU1412874A1 |

А -А
Фиг 2
4j
V
